Carolo-Cup
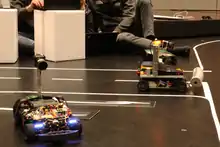
Der Carolo-Cup ist ein jährlich ausgetragener, internationaler Hochschulwettbewerb für autonom fahrende Modellfahrzeuge im Maßstab 1:10[1]. Der Cup wird von der Technischen Universität Braunschweig veranstaltet und findet seit 2008 statt[2][3].

Das von den Studenten vorab gefertigte Modellfahrzeug wird bezüglich technischer und wirtschaftlicher Aspekte von einer Expertenjury aus Wissenschaft[4] und Industrie[5] bewertet und muss verschiedene, an realistische Szenarien angelehnte, Fahraufgaben möglichst schnell und fehlerfrei absolvieren. Seit dem ersten Carolo-Cup wurden zusätzliche Herausforderungen, wie Kreuzungen, Fußgängerinseln und das Erkennen von Verkehrszeichen, hinzugefügt[6][7]. Neben deutschen Hochschulgruppen nehmen inzwischen auch internationale Teams, zum Beispiel aus Polen[8] und China teil. Um neuen Teams den Einstieg zu erleichtern, wurde der Basic-Cup geschaffen. Vor 2018 existierte zudem der "Junior-Cup", in dem Schülergruppen gegeneinander antraten.
Disziplinen
Grundsätzlich wird zwischen den statischen Disziplinen, bei denen die technischen Herangehensweisen präsentiert werden, und den dynamischen Disziplinen, bei denen das Fahrzeug eine Strecke abfährt, unterschieden[9].
Ab 2018
- Static Event (Statische Disziplinen)
- S1: Presentation and Overall Concept (Präsentation und Gesamtkonzept, 150 Punkte)
- S2: Technical Approaches (Technische Lösungsansätze, 150 Punkte)
- Dynamic Events (Dynamische Disziplinen)
- D1: Free Drive and Parking (Freie Fahrt mit Einparken, 300 Punkte für das beste Team)
- D2: Obstacle Evasion Course (Rundstrecke mit Hindernissen, 400 Punkte für das beste Team)
2017
- Static Event (Statische Disziplinen)
- S1: Presentation and Overall Concept (Präsentation und Gesamtkonzept, 150 Punkte)
- S2: Technical Approaches (Technische Lösungsansätze, 150 Punkte)
- Dynamic Events (Dynamische Disziplinen)
- D1: Parking (Einparken, 200 Punkte)
- D2: Free Driving w/o obstacles (Rundstrecke ohne Hindernisse, 250 Punkte für das beste Team)
- D3: Obstacle Evasion Parcours (Rundstrecke mit Hindernissen, 300 Punkte für das beste Team)
Regelwerk (ab 2018)
Im Folgenden ist das Regelwerk für den Cup ab 2018 kurz zusammengefasst[10].
Anforderungen an das Fahrzeug
Das Fahrzeug muss von den studentischen Teams selbst entwickelt werden. Kooperationen mit der Industrie sind jedoch zulässig und üblich[5]. Angetrieben werden muss das Fahrzeug mit einem elektrischen Motor. Zur Energieversorgung sind Akkumulatoren vorgeschrieben. Diese dürfen zwischen den einzelnen Disziplinen getauscht werden. Das Fahrzeug basiert auf einem vierrädrigen 1:10-Chassis. Der Radstand misst mindestens 200 Millimeter, die Spurweite mindestens 160 Millimeter. Das Fahrzeug darf nicht breiter und nicht höher als 300 Millimeter sein.
Gefahren wird mit Gummi- oder Schaumstoffreifen. Mindestens eine der beiden Achsen muss lenkbar sein.
Sensoren zur Erfassung der Umgebung dürfen frei gewählt werden. Üblich sind zum Beispiel Kameras, Ultraschallabstandssensoren, Triangulationssensoren usw.[11] Aktive Sensoren müssen sicher sein. Insbesondere Lasersensoren dürfen nur bis zur Klasse 2 eingesetzt werden.
Falls das Fahrzeug grobe Fehler begeht, muss es mit einer Fernbedienung zum Stillstand gebracht werden und gefahren werden können. Der Einsatz der Fernbedienung muss mit einer blau-blinkenden LED deutlich angezeigt werden.
Das Auto muss mit realistischen Lichtern ausgestattet sein, d. h. es sind Bremslichter, Abblendlichter und Fahrtrichtungsanzeiger vorgeschrieben.
Statische Disziplin
In einem 20-minütigen Vortrag mit anschließender Fragerunde wird kurz das Team und anschließend das Fahrzeug einer Fachjury vorgestellt.
Dynamische Disziplin: Freie Fahrt mit Einparken
In dieser Disziplin wird auf einem einer Landstraße nachempfundenen Kurs gefahren, der neben der zweispurigen Strecke u.A. aus Kreuzungen und Parkbuchten besteht. Ziel ist es, während der vorgegebenen Fahrzeit von zwei Minuten auf der Strecke eine möglichst große Distanz zurückzulegen. Während der Fahrzeit dürfen Parkversuche unternommen werden. Bis zu zwei erfolgreiche Parkversuche werden mit einem Multiplikator der insgesamt gefahrenen Distanz belohnt. Bei groben Fehlern darf mit der Fernbedienung des Fahrzeugs eingegriffen werden, was entsprechend bestraft wird.
Jedes Team startet mit einem Multiplikator von 1.0. Dieser kann durch erfolgreiche Parkmanöver (max. zwei Mal) um 1.0 erhöht werden. Bei einem fehlgeschlagenen Startversuch wird 0.5 vom Multiplikator abgezogen (max. ein Mal).
Fehler werden mit Abzug von der insgesamt vom Fahrzeug gefahrenen Strecke bestraft. Zum Abzug führen Fehler wie z. B. das Verlassen der rechten Spur mit mehr als einem Rad (-5 Meter), Kollision mit Hindernis (-5 m) etc.
Die Strecke für die Endbewertung ergibt sich dann aus
.

Dynamische Disziplin: Rundstrecke mit Hindernissen
In dieser Disziplin wird die Strecke des Free Drive um einige Elemente erweitert. Auf der Strecke sind statische (ortsfeste) und dynamische (sich bewegende) Hindernisse zu finden, die umfahren werden müssen. Zudem sind an reale Straßenverläufe angelehnte Elemente zu finden.
An Kreuzungen muss nach Schildern bzw. Stopp-/Halte-Linien gehalten werden und ggf. ist die Vorfahrt des Querverkehrs zu beachten. In Überholverbotszonen dürfen Hindernisse nicht überholt werden. Geschwindigkeitsbegrenzungen sind in Form von Bodenmarkierungen und Schildern vorhanden. Außerorts können Straßenabschnitte als Kraftfahrstraße ausgewiesen sein. In Vorstadtgebieten können Sperrflächen und Fußgängerübergänge angetroffen werden. Diese sollen, wie in der StVO beschrieben, behandelt werden.
Jedes Team startet mit einem Multiplikator von 1.0. Dieser kann, wie bei der Fahrt ohne Hindernisse, erhöht werden z. B. durch passieren Lassen von Fußgängern, Beachten der Vorfahrt/Geschwindigkeitsbegrenzung etc. Abzug gibt es bei einem fehlgeschlagenen Startversuch (-0.5, max. ein Mal).
Fehler auf der Strecke werden mit Abzug von der insgesamt vom Fahrzeug gefahrenen Strecke bestraft. Hierbei gibt es Fehler wie Verletzung des Sicherheitsabstands zu einem dynamischen Hindernis (-5 Meter), Überholvorgang im Kreuzungsbereich (-5 Meter) etc.
Die Strecke für die Endbewertung ergibt sich dann aus
.
Endergebnis
Für das Endergebnis werden die einzelnen Scores aus den jeweiligen Disziplinen zusammengerechnet.
Zeitleiste Carolo-Cup (2018–2019) / Master-Cup (ab 2020)
| Jahr | Teilnehmende Teams | Statische Disziplin
(Punkte in Klammern) |
Free-Ride und Parken
(Punkte in Klammern) |
Obstacle Course
(Punkte in Klammern) |
Endergebnis (Punkte in Klammern) | Quelle |
|---|---|---|---|---|---|---|
| 2018
(14.02.2018) |
|
|
|
|
|
[12] |
| 2019
(05.02.2019) |
|
|
|
|
|
[13] [14][15] |
| 2020
(11.02.2020) |
|
|
|
|
|
|
| 2021
(25.01.2021 bis (Aufgrund der Corona-Pandemie online mit abweichenden Bewertungsmaßstäben) |
|
|
[19][20] |
Zeitleiste Basic-Cup (ab 2018)
| Jahr | Teilnehmende Teams | Statische Disziplin
(Punkte in Klammern) |
Free-Ride und Parken
(Punkte in Klammern) |
Obstacle Course
(Punkte in Klammern) |
Endergebnis Basic-Cup
(Punkte in Klammern) |
Quelle |
|---|---|---|---|---|---|---|
| 2018
(14.02.2018) |
|
|
|
|
|
[12] [21][22] |
| 2019
(05.02.2019) |
|
|
|
|
|
[13][14] [15] [23][24] |
| 2020
(11.02.2020) |
|
|
|
|
|
[16] [17] [18] |
| 2021
(12.02.2021) (Aufgrund der Corona-Pandemie online mit abweichenden Bewertungsmaßstäben) |
|
|
[20] |
VDI-Sonderpreis für geringstes Gesamtgewicht (2020)
Auswahl gemessener Fahrzeug-Massen:
- OSCAR (1,8 kg)
- Ostfalia-Cup (1,8 kg)
- DAS LEMMA (1,9 kg)
- ISF Löwen (1,95 kg)
- Deep Mint (3,3 kg)
- Selfie (3,7 kg)
- Team Spatzenhirn (4 kg)
Das Preisgeld von 500 Euro teilen sich damit OSCAR und Ostfalia-Cup.
Siehe auch
Einzelnachweise
- Unger, Herwig: Echtzeit und Sicherheit : Echtzeit 2018. Berlin, Heidelberg, ISBN 978-3-662-58096-7, S. 39.
- Nolte, M., Graubohm, R., Form, T. et al.: Carolo-Cup — Zehn Jahre automatisiertes Fahren im Maßstab 1:10. In: Sonderprojekte ATZ/MTZ. 16. Auflage. Band 22, Nr. 2. Springer Fachmedien, Wiesbaden 2017, S. 16–21.
- News | Carolo-Cup. Abgerufen am 7. Februar 2019.
- Carolo Cup 2018: Gewappnet für die autonome Zukunft. Abgerufen am 8. Februar 2019.
- Carolo-Cup Workshop. Abgerufen am 5. Februar 2019.
- Carolo-Cup | Carolo-Cup. Abgerufen am 4. Februar 2019.
- Carolo-Cup: Autonome Modellfahrzeuge fahren um die Wette - VDE. Abgerufen am 8. Februar 2019.
- Deep Drive PL: Carolo Cup 2018. Abgerufen am 9. Februar 2019 (polnisch).
- Studentenwettbewerb: Carolinchen ist das beste autonome Modellauto - Golem.de. Abgerufen am 8. Februar 2019 (deutsch).
- Technische Universität Braunschweig: Carolo-Cup Regulations 2018. (PDF) Abgerufen am 4. Februar 2019 (englisch).
- News | Forschung. Abgerufen am 5. Februar 2019.
- Ergebnisse | Carolo-Cup. Abgerufen am 4. Februar 2019.
- Carolo-Cup 2019 - Finale. Abgerufen am 4. Februar 2019.
- CaroloCup TuBs: Carolo-Cup 2019 - Hauptwettbewerb. Abgerufen am 7. Februar 2019.
- Carolo-Cup: Carolo-Cup 2019 Ergebnisse. (PDF) Abgerufen am 7. Februar 2019 (englisch).
- TU Braunschweig: Carolo-Cup 2020. Abgerufen am 10. Februar 2020.
- TU Braunschweig: Wer holt den Carolo-Cup? 4. Februar 2020, abgerufen am 11. Februar 2020.
- TU Braunschweig: Carolo-Cup Ergebnisse 2020. 12. Februar 2020, abgerufen am 14. Februar 2020.
- TU Braunschweig: 2021 - Dates. Abgerufen am 25. Januar 2021.
- CaroloCup TuBs Youtube Kanal: Carolo-Cup@Home 2021. In: YouTube. 12. Februar 2021, abgerufen am 29. März 2021.
- Carolo-Cup 2018 in Braunschweig. Abgerufen am 8. Februar 2019.
- Benyamin Bahri: The Future Is Now. Abgerufen am 8. Februar 2019 (deutsch).
- NDR: Universität Ulm gewinnt Carolo Cup. Abgerufen am 8. Februar 2019.
- Carolo-Cup: Modellautorennen in Braunschweig. Abgerufen am 8. Februar 2019.