Drei-Phasen-Verkehrstheorie
Die Drei-Phasen-Verkehrstheorie ist eine alternative Verkehrstheorie, begründet von Boris Kerner in den Jahren 1996–2002.[1][2][3] Sie erklärt den Verkehrszusammenbruch und den resultierenden gestauten Verkehr auf Schnellstraßen. Kerner beschreibt drei Phasen des Verkehrs, wohingegen die klassischen Theorien auf Basis des Fundamentaldiagramms des Verkehrsflusses zwei Phasen umfassen: freier Verkehr und gestauter Verkehr. Der gestaute Verkehr wird von Kerner in zwei Phasen, Synchronisierter Verkehr und Sich bewegender breiter Stau, eingeteilt, woraus sich dann insgesamt drei Phasen ergeben:

| Synchronisierter Verkehr |

- Freier Verkehr (F)
- Synchronisierter Verkehr (S)
- Sich bewegender breiter Stau (J)
Eine Phase ist dabei als ein Zustand in Raum und Zeit definiert.
Freier Verkehr (F)
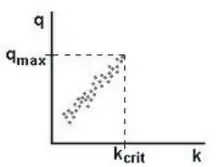
Im freien Verkehr können die Fahrer ihre Geschwindigkeit überwiegend frei wählen. Empirische Daten zeigen einen positiven Zusammenhang zwischen dem Verkehrsfluss (in Fahrzeugen pro Zeiteinheit) und der Verkehrsdichte (in Fahrzeugen pro Längeneinheit). Diese Beziehung wird durch einen maximalen Punkt des freien Verkehrs bei einem maximalen Fluss mit einer entsprechenden kritischen Dichte begrenzt (Bild 1).




Gestauter Verkehr
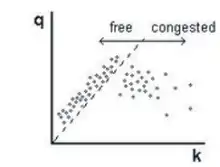
Im gestauten Verkehr zeigen empirische Daten einen weniger deutlichen Zusammenhang zwischen Fluss und Dichte. Daher folgert Kerner, dass das Fundamentaldiagramm, welches in der klassischen Verkehrstheorie verwendet wird, die komplexe Dynamik des Verkehrs nicht adäquat beschreiben kann. Stattdessen unterteilt er den gestauten Verkehr in Synchronisierten Verkehr und sich bewegende breite Staus. Im gestauten Verkehr ist die Fahrzeuggeschwindigkeit niedriger als die minimale Fahrzeuggeschwindigkeit des freien Verkehrs. Somit teilt die Linie mit der Steigung , die der minimalen Fahrzeuggeschwindigkeit des freien Verkehrs entspricht (punktierte Linie im Bild 2), alle empirischen Daten auf der Fluss-Dichte-Ebene in zwei Bereiche: Links liegende Daten entsprechen dem freien Verkehr, rechts liegende Daten entsprechen dem gestauten (Englisch: congested) Verkehr.


Definitionen [J] und [S] der Phasen J und S im gestauten Verkehr
In Kerners Theorie sind die Phasendefinitionen [J] und [S] für den gestauten Verkehr das Ergebnis der allgemeingültigen empirischen zeitlich-räumlichen Eigenschaften der Verkehrsdaten. Die Phasen J und S sind durch die Definitionen [J] und [S] wie folgt definiert:
Die Verkehrsphase „sich bewegender breiter Stau“ [J]
Ein „sich bewegender breiter Stau“ (englisch: wide moving jam) bewegt sich stromaufwärts durch alle Engstellen hindurch. Dabei wird die mittlere Geschwindigkeit der stromabwärtigen Staufront beibehalten. Anhand dieser charakteristischen Eigenschaft sich bewegender breiter Staus ist die Phase J definiert.

Der Begriff sich bewegender breiter Stau soll die charakteristische Eigenschaft der betreffenden Staus widerspiegeln, sich durch alle übrigen Verkehrszustände und alle Engstellen hindurch fortzubewegen und dabei die Geschwindigkeit der stromabwärtigen Staufront beizubehalten. Der Ausdruck sich bewegender Stau spiegelt wider, dass sich der Stau als ganze lokalisierte Struktur auf der Straße fortbewegt. Zur Unterscheidung sich bewegender breiter Staus von sonstigen sich bewegenden Staus, die nicht zwangsläufig die mittlere Geschwindigkeit der stromabwärtigen Staufront beibehalten, benutzt Kerner den Begriff breit. Der Begriff breit spiegelt die folgende Tatsache wider: Wenn die Breite (d. h. Ausdehnung längs der Straße) eines sich bewegenden Staus wesentlich größer ist als die Breite der Staufronten und wenn im Innern des Staus die Fahrzeuggeschwindigkeit den Wert Null annimmt, dann behält der Stau immer die Geschwindigkeit der stromabwärtigen Staufront bei (vgl. Abschnitt 7.6.5 des Buches [4]). Somit meint der Begriff breit nicht die Breite quer durch den Stau, sondern bezieht sich darauf, dass der gesamte Stau eine wesentlich größere Länge hat als die Übergangsbereiche an seinen beiden Enden. Historisch nutzte Kerner den Begriff breit in qualitativer Analogie zu breiten Autosolitonen,[5] die in vielen Systemen aus den Naturwissenschaften auftreten (wie z. B. Gasplasma, Elektron-Loch-Plasma in Halbleitern, biologischen Systemen und chemischen Reaktionen): Sowohl breite sich bewegende Staus als auch breite Autosolitonen weisen charakteristische Eigenschaften auf, die nicht von den Anfangsbedingungen abhängen, unter denen diese lokalisierten Strukturen entstanden sind.
Die Verkehrsphase „Synchronisierter Verkehr“ [S]
Im „Synchronisierten Verkehr“ zeigt die stromabwärtige Front, wo die Fahrzeuge bei der Einfahrt in den freien Verkehr beschleunigen, nicht die charakteristische Eigenschaft sich bewegender breiter Staus. Insbesondere ist die stromabwärtige Front von Synchronisiertem Verkehr oft an einer Engstelle befestigt. Synchronisierter Verkehr ist durch kontinuierlichen Verkehrsfluss ohne signifikanten Stillstand, wie er oft in sich bewegenden breiten Staus auftritt, gekennzeichnet.
Der Begriff „Synchronisierter Verkehr“ soll die folgenden Eigenschaften dieser Verkehrsphase widerspiegeln: Einerseits gibt es eine Tendenz zur Synchronisierung der Fahrzeuggeschwindigkeiten auf verschiedenen Fahrspuren. Zusätzlich gibt es auf den einzelnen Fahrspuren eine Tendenz zur Synchronisierung der Fahrzeuggeschwindigkeiten (Gruppenbildung von Fahrzeugen). Dies liegt an einer geringen Überholwahrscheinlichkeit.
Erklärung der Phasendefinitionen [J] und [S] mit empirischen Messdaten
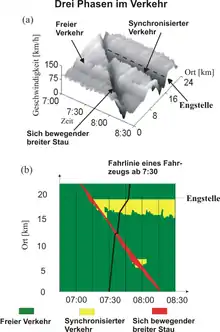
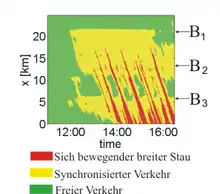
Die Definitionen [J] und [S] werden in Bild 3 (a) durch reale Messdaten für die mittlere Fahrzeuggeschwindigkeit illustriert. Es gibt zwei unterschiedliche zeitlich-räumliche Strukturen des gestauten Verkehrs mit niedrigen Fahrzeuggeschwindigkeiten in Bild 3 (a). Eine Struktur des gestauten Verkehrs propagiert stromaufwärts mit nahezu konstanter Geschwindigkeit der stromabwärtigen Front durch die Engstelle auf der Schnellstraße. Entsprechend der Definition [J] gehört diese Struktur des gestauten Verkehrs zur Verkehrsphase „sich bewegender breiter Stau“. Dagegen ist die stromabwärtige Front der anderen Struktur des gestauten Verkehrs an der Engstelle fixiert. Entsprechend der Definition [S] gehört diese Struktur des gestauten Verkehrs zur Verkehrsphase „Synchronisierter Verkehr“ (Bilder 3 (a) und (b)). Andere Beispiele für die empirische Validierung der Verkehrsphasendefinitionen [J] und [S] sind in den Büchern[4] und [6], im Artikel[7] sowie einer empirischen Untersuchung von Floating-Car-Daten [8] (Floating-Car-Daten werden auch Probe-Vehicle-Daten genannt).
Definition der Verkehrsphasen anhand von Einzelfahrzeugdaten
In Abschnitt 6.1. des Buchs[6] wird gezeigt, dass die Verkehrsphasendefinitionen [J] und [S] der Ausgangspunkt der meisten Hypothesen der Drei-Phasen-Verkehrstheorie und mit ihr zusammenhängender mikroskopischer Verkehrsflussmodelle ist. Die Verkehrsphasendefinitionen [J] und [S] sind nicht-lokale, makroskopische Definitionen und können erst angewendet werden, nachdem makroskopische Daten in Raum und Zeit gemessen wurden, das heißt in „Offline“-Untersuchungen. Dies liegt daran, dass zur eindeutigen Unterscheidung der Verkehrsphasen J und S anhand der Definitionen [J] und [S] untersucht werden muss, wie sich gestauter Verkehr an einer Engstelle fortbewegt. Dies wird oft als Nachteil der Verkehrsphasendefinitionen [J] und [S] angesehen. Es gibt jedoch auch mikroskopische Kriterien zur Unterscheidung der Phasen J und S ohne die Untersuchung der Propagation von gestautem Verkehr durch eine Engstelle. Die mikroskopischen Kriterien lauten wie folgt (vgl. Abschnitt 2.6 im Buch [6]): Falls in Einzelfahrzeugdaten (mikroskopischen Daten) von gestautem Verkehr eine „Unterbrechung des Verkehrsflusses“ beobachtet wird, d. h. eine Zeitlücke zwischen zwei aufeinanderfolgenden Fahrzeugen, die viel größer ist als die mittlere Zeitverzögerung bei der Beschleunigung aus einem sich bewegenden breiten Stau (letztere beträgt ca. 1,3 – 2,1 s), dann entspricht die Unterbrechung des Verkehrsflusses der Phase J. Wurden mit diesem Kriterium alle sich bewegenden breiten Staus gefunden, so gehören alle übrigen Zustände des gestauten Verkehrs der Phase J an.
Kerners Hypothese über das zweidimensionale (2D) Gebiet homogener Zustände des Synchronisierten Verkehrs in der Fluss-Dichte-Ebene
Hypothetische homogene Zustände des Synchronisierten Verkehrs
Ein homogener Zustand des Synchronisierten Verkehrs (English: “a steady state of synchronized flow”; im weiteren „homogener Synchronisierter Verkehr“ genannt) ist ein hypothetischer Zustand des Synchronisierten Verkehrs von gleichen Fahrzeugen und Fahrern, die sich mit der gleichen zeitunabhängigen Geschwindigkeit und gleichen Abständen (der Abstand ist die Netto-Weglücke zwischen zwei aufeinanderfolgenden Fahrzeugen) bewegen. Das bedeutet, dieser Synchronisierte Verkehr ist homogen in Zeit und Raum.
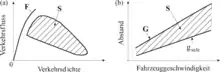
Kerners Hypothese lautet wie folgt: Zustände des homogenen Synchronisierten Verkehrs überdecken ein zweidimensionales Gebiet in der Fluss-Dichte-Ebene (2D-Gebiet „S“ in Abb. 4 (a)). Die Menge der möglichen Zustände freien Verkehrs überlappt dabei die Menge der Zustände des homogenen Synchronisierten Verkehrs. Die Zustände des freien Verkehrs auf einer mehrspurigen Schnellstraße und die Zustände des homogenen Synchronisierten Verkehrs sind bei einer gegebenen Verkehrsdichte getrennt durch eine Lücke im Verkehrsfluss, und, demzufolge, durch eine Lücke in der Geschwindigkeit: bei jeder einzelnen Verkehrsdichte ist die Geschwindigkeit im Synchronisierten homogenen Verkehr geringer als im freien Verkehr.
In Übereinstimmung dieser Hypothese der Kerner’schen Drei-Phasen-Verkehrstheorie kann ein Fahrer bei einer gegebenen Geschwindigkeit im Synchronisierten Verkehr eine beliebige Wahl des Abstands zum vorausfahrenden Fahrzeug treffen. Dies ist innerhalb einer gewissen Bandbreite von Abständen entsprechend dem zweidimensionalen Gebiet der Zustände des homogenen Synchronisierten Verkehrs möglich (Abb. 4 (b)): ein Fahrer akzeptiert zu verschiedenen Zeiten verschiedene Abstände und steuert nicht auf einen festen Abstand zum vorausfahrenden Fahrzeug hin.


Die Hypothese der Kerner’schen Drei-Phasen-Verkehrstheorie über das 2D-Gebiet homogenen Synchronisierten Verkehrs steht im Widerspruch zu vorherigen Verkehrsflusstheorien über das Fundamentaldiagramm des Verkehrs, welche eine eindimensionale Beziehung zwischen Verkehrsdichte und Verkehrsfluss annehmen.
Fahrzeugfolgeverhalten in der Drei-Phasen-Verkehrstheorie
Gemäß der Kerner’schen Drei-Phasen-Verkehrstheorie beschleunigt ein Fahrzeug zum vorausfahrenden Fahrzeug, wenn der Abstand größer als ein Synchronisationsabstand ist, d. h. bei (bezeichnet als „Fahrzeugbeschleunigung“ in Abb. 5). Ein Fahrzeug verzögert, wenn sein Abstand kleiner als ein Sicherheitsabstand ist, d. h. bei (bezeichnet als „Fahrzeugverzögerung“ in Abb. 5).



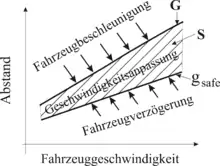

Ist der Abstand zum vorausfahrenden Fahrzeug geringer als der Synchronisationsabstand , so passt der Fahrer seine Geschwindigkeit der Geschwindigkeit des vorausfahrenden Fahrzeugs an, ohne auf den exakten Abstand zu achten. Dies gilt, solange dieser Abstand nicht kleiner als der Sicherheitsabstand wird (bezeichnet als „Geschwindigkeitsanpassung“ in Abb. 5). Demnach kann beim Fahrzeugfolgeverhalten gemäß der Kerner’schen Drei-Phasen-Verkehrstheorie der Abstand jeden Wert im Bereich annehmen.
Verkehrszusammenbruch – ein F→S-Phasenübergang
In Messdaten entsteht der gestaute Verkehr meist an einer Engstelle einer Schnellstraße, wie beispielsweise einer Zufahrt, einer Abfahrt oder einer Baustelle. Ein solcher Übergang vom freien zum gestauten Verkehr ist als Verkehrszusammenbruch (d. h. Zusammenbruch des Verkehrs) bekannt. In der Kerner’schen Drei-Phasen-Verkehrstheorie wird ein Verkehrszusammenbruch durch einen F→S-Phasenübergang erklärt. Diese Erklärung wird durch verfügbare Messdaten bestätigt, da in Messungen des Verkehrs nach einem Verkehrszusammenbruch an einer Engstelle die stromabwärtige Flanke des gestauten Verkehrs an der Engstelle fixiert wird. Deshalb entspricht der bei einem Verkehrszusammenbruch entstehende gestaute Verkehr der Definition [S] für die Verkehrsphase „Synchronisierter Verkehr“.
Empirische spontane und induzierte F→S-Phasenübergänge
Kerner stellt unter Verwendung empirischer Messdaten fest, dass synchronisierter Verkehr sich in freiem Verkehr spontan (spontaner F→S-Phasenübergang) oder von außen induziert (induzierter F→S-Phasenübergang) bilden kann.
Ein spontaner F→S-Phasenübergang bedeutet, dass ein Verkehrszusammenbruch auftritt, wenn vorher freier Verkehr sowohl an der Engstelle als auch stromabwärts und stromaufwärts der Engstelle existierte. Dies bedeutet, dass ein spontaner F→S-Phasenübergang durch das Wachstum einer intrinsischen Störung im freien Verkehr auftritt.
Dagegen wird ein induzierter Zusammenbruch durch Störungen im Verkehrsfluss verursacht, die ursprünglich an einem anderen Ort aufgetreten sind. Dies steht normalerweise im Zusammenhang mit einer stromaufwärtigen Ausbreitung eines Gebietes Synchronisierten Verkehrs oder eines sich bewegenden breiten Staus. Ein empirisches Beispiel des induzierten Verkehrszusammenbruches an einer Engstelle, der zum Synchronisierten Verkehr führt, ist auf Bild 3 zu sehen: durch die Bewegung eines sich bewegenden breiten Staus durch die Engstelle entsteht Synchronisierter Verkehr. Die Existenz empirischer induzierter Verkehrszusammenbrüche (d. h. empirischer induzierter F→S-Phasenübergänge) bedeutet, dass F→S-Phasenübergänge in metastabilen Zuständen des freien Verkehrs auftreten. Der Begriff „metastabiler freier Verkehr“ bedeutet, dass der Zustand des freien Verkehrs stabil gegenüber kleinen Störungen ist, d. h. im Fall kleiner Störungen besteht der freie Verkehr an der Engstelle fort. Treten jedoch im freien Verkehr größere Störungen in der Nähe einer Engstelle auf, so ist der freie Verkehr instabil und es entsteht Synchronisierter Verkehr an der Engstelle.
Physikalische Erklärung des Verkehrszusammenbruches in der Drei-Phasen-Theorie
Kerner erklärt die Natur des F→S-Phasenübergangs anhand einer Konkurrenz von „Geschwindigkeitsanpassung“ (Englisch: speed adaptation) und „Über-Beschleunigung“ (Englisch: over-acceleration). Geschwindigkeitsanpassung ist definiert als die Verzögerung eines Fahrzeugs auf die Geschwindigkeit des langsameren vorausfahrenden Fahrzeugs. Über-Beschleunigung ist definiert als Beschleunigung eines Fahrzeuges, dessen vorausfahrendes Fahrzeug weder schneller fährt noch beschleunigt. In der Kerner’schen Theorie ist die Wahrscheinlichkeit der Über-Beschleunigung eine unstetige Funktion der Fahrzeuggeschwindigkeit: bei gegebener Fahrzeugdichte ist die Wahrscheinlichkeit der Über-Beschleunigung im freien Verkehr größer als im Synchronisierten Verkehr. Wenn im freien Verkehr innerhalb einer lokalen Störung der Geschwindigkeit die Geschwindigkeitsanpassung gegenüber der Über-Beschleunigung vorherrscht, so findet ein F→S-Phasenübergang statt. Überwiegt andererseits die Über-Beschleunigung gegenüber der Geschwindigkeitsanpassung, so klingt die Störung mit der Zeit ab. In einem Gebiet Synchronisierten Verkehrs ist eine starke Über-Beschleunigung verantwortlich für einen rückwärtigen Übergang vom Synchronisierten Verkehr zum freien Verkehr (S→F-Übergang).
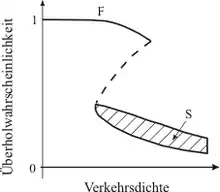
Die Über-Beschleunigung von Fahrzeugen kann in Form mehrerer möglicher Mechanismen auftreten. Es kann angenommen werden, dass auf einer mehrspurigen Schnellstraße der Wechsel auf eine schnellere Spur der wahrscheinlichste Mechanismus der Über-Beschleunigung ist. In diesem Fall erklären sich F→S-Phasenübergänge durch das Wechselspiel von Beschleunigung bei der Überholung eines langsameren Fahrzeuges (Über-Beschleunigung) und Verzögerung auf die Geschwindigkeit des langsameren vorausfahrenden Fahrzeuges (Geschwindigkeitsanpassung). Überholen unterstützt den Fortbestand des freien Verkehrs. „Geschwindigkeitsanpassung“ führt andererseits zu Synchronisiertem Verkehr. Eine solche Geschwindigkeitsanpassung findet dann statt, wenn Überholen nicht möglich ist. Kerner nimmt an, dass die Überholwahrscheinlichkeit eine unterbrochene Funktion der Fahrzeugdichte ist (Bild 6): bei einer gegebenen Fahrzeugdichte ist die Überholwahrscheinlichkeit im freien Verkehr wesentlich größer als die im Synchronisierten Verkehr.
Diskussion von Kerners Erklärung des Verkehrszusammenbruches
Kerners Erklärung des Verkehrszusammenbruches an Engstellen von Schnellstraßen durch einen F→S-Phasenübergang hängt mit den folgenden grundlegenden empirischen Eigenschaften des Verkehrszusammenbruches an Engstellen zusammen, wie sie in echten Messdaten beobachtet werden: (i) Spontane Verkehrszusammenbrüche im eingangs freien Verkehr führen zum Auftreten von gestautem Verkehr, dessen stromabwärtige Front an der Engstelle fixiert ist (zumindest für ein gewisses Zeitintervall), d. h. dieser gestaute Verkehr genügt der Definition [S] für die Verkehrsphase des Synchronisierten Verkehrs. Anders ausgedrückt: spontaner Verkehrszusammenbruch ist immer ein F→S-Phasenübergang. (ii) Die Wahrscheinlichkeit des spontanen Verkehrszusammenbruches ist eine wachsende Funktion des Verkehrsflusses an der Engstelle. (iii) An derselben Engstelle kann ein Verkehrszusammenbruch entweder spontan oder induziert sein (vgl. die empirischen Beispiele dieser grundlegenden Eigenschaften des Verkehrszusammenbruches in den Abschnitten 2.2.3 und 3.1. des Buchs [6]); aus diesem Grund tritt der F→S-Phasenübergang in metastabilem freiem Verkehr auf.
Der Grund für Kerners Theorie und seine Kritik an klassischen Verkehrstheorien
Die grundlegenden empirischen Eigenschaften (i)–(iii) des Verkehrszusammenbruches können nicht durch klassische Verkehrstheorien und Modelle erklärt werden. Die Suche nach Erklärungen dieser grundlegenden empirischen Eigenschaften des Verkehrszusammenbruches war der Grund für die Entwicklung der Kerner’schen Drei-Phasen-Verkehrstheorie. Insbesondere führt bei Zwei-Phasen-Verkehrsmodellen, in denen der Verkehrszusammenbruch mit einer Instabilität des freien Flusses zusammenhängt, diese Instabilität zu einem F→J-Phasenübergang. D. h., in diesen Verkehrsmodellen wird der Verkehrszusammenbruch durch das spontane Auftreten sich bewegender breiter Staus in eingangs freiem Verkehr bestimmt (vgl. Kerners Kritik an derartigen Zwei-Phasen-Modellen sowie anderer klassischer Verkehrsmodelle und Theorien in Kapitel 10 des Buches[6] sowie im kritischen Übersichtsartikel [9]).
Unendliche Anzahl an Straßenkapazitäten
In der Drei-Phasen-Verkehrstheorie werden die grundlegenden empirischen Eigenschaften des Verkehrszusammenbruches durch einen F→S-Phasenübergang erklärt, der in metastabilem freiem Verkehr auftritt. Die wahrscheinlich wichtigste Konsequenz hiervon ist die Existenz einer Spanne von Straßenkapazitäten zwischen einer maximalen und einer minimalen Kapazität.
Maximale und minimale Straßenkapazität
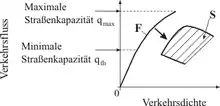
Ein spontaner Verkehrszusammenbruch, d. h. ein spontaner F→S-Phasenübergang, kann in einer breiten Spanne von Verkehrsflüssen im freien Verkehr auftreten. Anhand empirischer Messdaten, die belegen, dass sowohl ein spontaner als auch ein induzierter Verkehrszusammenbruch an der gleichen Engstelle einer Schnellstraße möglich ist, stellt Kerner fest, dass eine unendliche Zahl von Straßenkapazitäten zu jedem Zeitpunkt existiert. Diese unendlich vielen Straßenkapazitäten liegen zwischen einer minimalen Straßenkapazität und einer maximalen Straßenkapazität des freien Verkehrs (Bild 7).


Straßenkapazitäten und Metastabilität des freien Verkehrs
Falls der Verkehrsfluss im freien Verkehr in der Nähe der maximalen Straßenkapazität liegt, führen schon kleine Störungen im freien Verkehr an einer Engstelle zu einem spontanen F→S-Phasenübergang. Demgegenüber können bei einem Verkehrsfluss nahe der minimalen Straßenkapazität nur sehr große Störungen im freien Verkehr an einer Engstelle zum spontanen F→S-Phasenübergang führen (vgl. z. B. Abschnitt 17.2.2 des Buches [4]). Die Wahrscheinlichkeit einer kleinen Störung im freien Verkehr ist jedoch viel größer als die einer größeren Störung. Deshalb gilt: je größer der Verkehrsfluss im freien Verkehr an der Engstelle ist, desto größer ist auch die Wahrscheinlichkeit des spontanen F→S-Phasenüberganges. Falls der Verkehrsfluss im freien Verkehr kleiner als die minimale Straßenkapazität ist, kann kein Verkehrszusammenbruch (F→S-Phasenübergang) an der Engstelle stattfinden, d. h. der freie Verkehr ist stabil.
Die unendliche Zahl der Straßenkapazitäten kann durch die Metastabilität des freien Verkehrs bei Verkehrsflüssen im Bereich

verdeutlicht werden. Metastabilität des freien Verkehrs bedeutet, dass bei kleinen Störungen der Verkehrszustand immer noch stabil sein kann (freier Verkehr bleibt bestehen), aber bei größeren Störungen der freie Verkehr instabil wird und dann ein F→S-Phasenübergang zum Synchronisierten Verkehr stattfindet.
Diskussion der Definitionen der Straßenkapazität
Das grundlegende theoretische Verständnis der Drei-Phasen-Verkehrstheorie über die stochastische Kapazität des freien Verkehrs an einer Engstelle lautet wie folgt: Zu jedem Zeitpunkt gibt es unendlich viele Straßenkapazitäten für den freien Verkehr an einer Engstelle. Die unendliche Anzahl an Verkehrsflüssen, bei denen ein Verkehrszusammenbruch an einer Engstelle induziert werden kann, entspricht der unendlichen Anzahl an Straßenkapazitäten. Diese Kapazitäten liegen innerhalb der Spanne von Verkehrsflüssen zwischen einer minimalen und einer maximalen Kapazität (Bild 7). Die unendliche Anzahl an Straßenkapazitäten der Kerner’schen Drei-Phasen-Verkehrstheorie widerspricht fundamental dem klassischen Verständnis der stochastischen Straßenkapazität sowie den klassischen Verkehrstheorien und -methoden für Verkehrsmanagement und Verkehrssteuerung, in denen zu jeder Zeit die Existenz einer bestimmten Straßenkapazität angenommen wird. Im Gegensatz dazu gibt es in der Kerner’schen Drei-Phasen-Verkehrstheorie zu jeder Zeit eine unendliche Zahl von Straßenkapazitäten, die sich innerhalb des oben erwähnten Bereichs zwischen der minimalen Straßenkapazität und der maximalen Straßenkapazität befinden. Die Werte von und können beträchtlich von verschiedenen Verkehrsparametern abhängen (prozentualer Anteil an LKWs, Wetter, Eigenschaften der effektiven Engstelle usw.). Die Existenz einer Spanne von Straßenkapazitäten zu jedem Zeitpunkt gemäß der Kerner’schen Theorie wirkt sich entscheidend auf die Methoden der Verkehrssteuerung, der dynamischen Verkehrsumlegung und des Verkehrsmanagements aus. Insbesondere führte Kerner, um den grundlegenden empirischen Eigenschaften des Verkehrszusammenbruches zu genügen, das Breakdown-Minimization-Prinzip (BM-Prinzip) zur Optimierung und Steuerung von Straßenverkehrsnetzen ein.
Sich bewegende breite Staus (J)
Ein sich bewegender Stau wird „breit“ genannt, wenn seine Länge (in Fahrtrichtung der Straße) die Längen der Staufronten deutlich übersteigt. Die mittlere Geschwindigkeit der Fahrzeuge innerhalb des sich bewegenden breiten Staus ist dabei deutlich geringer als die mittlere Geschwindigkeit im freien Verkehr. An der stromabwärtigen Staufront beschleunigen die Fahrzeuge wieder zu der im freien Verkehr oder im Synchronisierten Verkehr möglichen Geschwindigkeit. An der stromaufwärtigen Front kommen die Fahrzeuge aus dem freien Verkehr oder Synchronisierten Verkehr und müssen ihre Geschwindigkeit verringern. Entsprechend der Definition [J] behält ein sich bewegender breiter Stau die mittlere Geschwindigkeit der stromabwärtigen Staufront bei, sogar wenn der Stau sich durch andere Verkehrsphasen oder Engstellen fortbewegt. Der Verkehrsfluss (Anzahl der Fahrzeuge je Zeiteinheit) ist innerhalb eines sich bewegenden breiten Staus sehr stark reduziert.
Charakteristische Parameter sich bewegender breiter Staus
Kerners empirische Resultate zeigen, dass einige charakteristische Parameter von sich bewegenden breiten Staus vom Verkehrsaufkommen und den Eigenschaften einer Engstelle (z. B. wo und wann ein Stau entstanden ist), unabhängig sind. Jedoch können diese charakteristischen Parameter von Wetterbedingungen, Straßenverhältnissen, Fahrzeugtechnologie, Anteil an langen Fahrzeugen usw. stark abhängen. Die Geschwindigkeit der stromabwärtigen Staufront eines sich bewegenden breiten Staus (in stromaufwärtiger Richtung) ist ein charakteristischer Parameter, genauso wie der Verkehrsfluss stromabwärts der stromabwärtigen Staufront (bei freiem Verkehr an dieser Stelle, siehe Bild 8). Das bedeutet, dass mehrere sich bewegende breite Staus unter ähnlichen Bedingungen ähnliche Eigenschaften aufweisen. Diese Parameter sind aus diesen Gründen in einem gewissen Maße vorhersagbar. Die Bewegung der stromabwärtigen Staufront kann in der Fluss-Dichte Ebene durch eine Linie, die „Linie J“ genannt wird, dargestellt werden (Linie J in Bild 8). Die Steigung der Linie J ist gleich der Geschwindigkeit der stromabwärtigen Staufront .

Minimale Straßenkapazität und Abfluss aus sich bewegenden breiten Staus
Kerner betont, dass die minimale Straßenkapazität und der Abfluss aus einem sich bewegenden breiten Stau zwei qualitativ verschiedenen Eigenschaften des freien Verkehrs entsprechen: Die minimale Straßenkapazität ist eine Charakteristik des F→S-Phasenübergangs an einer Engstelle (d. h., des Verkehrszusammenbruches). Dagegen charakterisiert der Abfluss aus einem sich bewegenden breiten Stau die Bedingungen der Existenz und der Entstehung des Staus, d. h. der Verkehrsphase J, während sich der Stau durch freien Verkehr bewegt. So kann ein sich bewegender breiter Stau, der sich durch freien Verkehr bewegt, nur fortbestehen, wenn der Stauzufluss größer ist als der Stauabfluss , ansonsten löst sich der Stau mit der Zeit auf. In Abhängigkeit von Verkehrsparametern (wie Wetter, Anteil der LKWs im Verkehrsfluss usw.) und von Charakteristiken der Engstelle, wo der F→S-Phasenübergang stattfindet, kann die minimale Straßenkapazität entweder kleiner als der Stauabfluss (wie in Bild. 8 dargestellt) oder auch größer als sein.

Synchronisierter Verkehr (S)
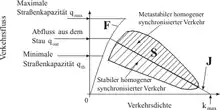
Im Gegensatz zu sich bewegenden breiten Staus können sowohl der Verkehrsfluss als auch die Geschwindigkeiten der Fahrzeuge innerhalb der Verkehrsphase des Synchronisierten Verkehrs beträchtlich variieren. Die stromabwärtige Front des Synchronisierten Verkehrs ist oftmals an einer bestimmten Stelle entlang der Straße fixiert (vgl. Definition [S]), für gewöhnlich an einer Engstelle. Der Verkehrsfluss in dieser Phase kann selbst dann noch vergleichbar zum Verkehrsfluss im freien Verkehr sein, wenn die Geschwindigkeiten der Fahrzeuge stark reduziert sind. Da Synchronisierter Verkehr die charakteristische Staueigenschaft der Phase J sich bewegender breiter Staus nicht aufweist, wird in der Kerner’schen Drei-Phasen-Verkehrstheorie angenommen, dass hypothetische homogene Zustände des Synchronisierten Verkehrs ein zweidimensionales Gebiet in der Fluss-Dichte-Ebene bilden (gestrichelte Flächen in Bild 8).
S→J-Phasenübergang
Sich bewegende breite Staus entstehen nicht spontan im freien Verkehr, können sich aber in Gebieten des Synchronisierten Verkehrs spontan bilden. Dieser Phasenübergang wird S→J-Phasenübergang genannt.
„Stau aus dem Nichts“ – F→S→J-Phasenübergänge
Im Jahr 1998[1] fand Kerner heraus, dass sich das Auftreten eines sich bewegenden breiten Staus im freien Verkehr in echten Verkehrsdaten als Kaskade von F→S→J-Phasenübergängen beobachten lässt (Bild 9): Zunächst entsteht Synchronisierter Verkehr in einem Gebiet des freien Verkehrs. Wie oben erklärt wurde, tritt ein solcher F→S-Phasenübergang meistens an einer Engstelle der Schnellstraße auf. Dann findet eine „Eigenkompression“ dieses Synchronisierten Verkehrs statt, die Verkehrsdichte wird dabei höher, die Geschwindigkeit nimmt weiter ab. Diese Eigenkompression wird „pinch effect“ genannt. In diesen Pinch-Gebieten des Synchronisierten Verkehrs entstehen sich bewegende enge Staus. Wenn diese sich bewegenden engen Staus wachsen, werden sie zu sich bewegenden breiten Staus, was in Bild 9 durch S→J gekennzeichnet wird. Somit entstehen sich bewegende breite Staus später und an einer anderen Stelle der Straße, als der Verkehrszusammenbruch (F→S-Phasenübergang) stattgefunden hat. Daher sollte man bei der Darstellung der im realen Verkehr auftretenden Verkehrsphasenübergänge (Bild 9 (a)) in der Geschwindigkeit-Dichte-Ebene (Bild 9 (b)) (bzw. der Geschwindigkeit-Verkehrsfluss-Ebene oder Verkehrsfluss-Dichte-Ebene) beachten, dass die Zustände des Synchronisierten Verkehrs und die Zustände geringer Geschwindigkeit im sich bewegenden breiten Stau an verschiedenen Stellen der Straße gemessen wurden. Kerner stellt fest, dass die Häufigkeit des Auftretens von sich bewegenden breiten Staus umso höher ist, je höher die Dichte im Synchronisierten Verkehr ist. Diese sich bewegenden breiten Staus bewegen sich stromaufwärts fort, sogar wenn sie sich durch Gebiete des Synchronisierten Verkehrs oder andere Engstellen fortbewegen. Offensichtlich sind alle Kombinationen rückwärtiger Phasenübergänge (Übergänge S→F, J→S und J→F in Bild 9) möglich.
Physik des S→J-Phasenübergangs
Zur weiteren Verdeutlichung des S→J-Phasenübergangs sei bemerkt, dass in der Kerner’schen Drei-Phasen-Verkehrstheorie die Linie J die homogenen Zustände des Synchronisierten Verkehrs in zwei Bereiche unterteilt (Bild 8). Zustände des homogenen Synchronisierten Verkehrs, die oberhalb der Linie J liegen, sind metastabil. Dagegen sind die Zustände des homogenen Synchronisierten Verkehrs, die unterhalb der Linie J liegen, stabil. In diesen stabilen Zuständen kann kein S→J-Phasenübergang stattfinden. Metastabiler homogener Synchronisierter Verkehr bedeutet, dass bei kleinen auftretenden Störungen der Verkehrszustand immer noch stabil ist, aber bei größeren Störungen der Synchronisierte Verkehr instabil wird und ein S→J-Phasenübergang zu einem sich bewegenden breiten Stau stattfinden kann.
Verkehrsmuster aus S und J
Es können sehr komplexe Muster des gestauten Verkehrs beobachtet werden, die durch F→S- und S→J-Phasenübergänge verursacht werden.
Klassifikation der Verkehrsmuster aus S
Ein Muster des Synchronisierten Verkehrs (Synchronized Flow Pattern (SP)) mit einer ortsfesten stromabwärtigen und einer nicht kontinuierlich propagierenden stromaufwärtigen Front, wird lokaler Synchronisierter Verkehr genannt (Localized Synchronized Flow Pattern (LSP)). Es ist jedoch häufig zu beobachten, dass sich die stromaufwärtige Front eines SP stromaufwärts bewegt. Wenn sich nur die stromaufwärtige Staufront stromaufwärts bewegt, dann wird dieses SP ein sich verbreiterndes Muster des Synchronisierten Verkehrs genannt (Widening Synchronized Flow Pattern (WSP)). Die stromabwärtige Front verbleibt an der effektiven Engstelle und die Ausdehnung des SP wächst an. Es ist auch möglich, dass sich sowohl die stromaufwärtige als auch die stromabwärtige Front stromaufwärts bewegen. Die stromabwärtige Front ist dann nicht mehr an der effektiven Engstelle fixiert. Diese Muster werden sich bewegende Muster des Synchronisierten Verkehrs genannt (Moving Synchronized Flow Pattern (MSP)).
„Einfangen“ von Synchronisiertem Verkehr an einer Engstelle
Der Unterschied zwischen einem SP und einem sich bewegenden breiten Stau zeigt sich im sogenannten „Catch Effect“, der auftreten kann, wenn ein WSP oder MSP eine stromaufwärtige Engstelle erreicht. Das SP wird an der Engstelle eingefangen und als Ergebnis bildet sich ein neues gestautes Verkehrsmuster an dieser Engstelle. Ein sich bewegender breiter Stau dagegen wird nicht an einer Engstelle eingefangen und bewegt sich immer weiter durch die Engstelle stromaufwärts. Im Gegensatz zu sich bewegenden breiten Staus weist Synchronisierter Verkehr, sogar wenn er sich als ein MSP bewegt, keine charakteristischen Parameter auf. Zum Beispiel kann die Geschwindigkeit der stromabwärtigen Front eines MSP über einen weiten Bereich variieren und für verschiedene MSPs unterschiedlich sein. Diese Eigenschaften von SPs und sich bewegenden breiten Staus folgen aus den der Verkehrsphasendefinitionen [S] und [J].
Allgemeines Staumuster (GP) – Verkehrsmuster aus S und J
Oft werden Staumuster beobachtet, die beide Verkehrsphasen des gestauten Verkehrs beinhalten, sowohl S als auch J. Ein solches Verkehrsmuster aus S und J wird Allgemeines Staumuster (General Pattern (GP)) genannt.



Auf vielen Schnellstraßen liegen benachbarte Engstellen oft in geringer Entfernung zueinander. Ein gestautes Verkehrsmuster, bei dem der Synchronisierte Verkehr zwei oder mehr Engstellen der Straße umfasst, wird EP genannt (EP: Expanded Pattern). Ein EP kann zwar ausschließlich aus Synchronisiertem Verkehr bestehen (ESP: Expanded Synchronized Flow Pattern), aber gewöhnlich entstehen im Synchronisierten Verkehr sich bewegende breite Staus. Im letzteren Fall wird das EP als EGP (EGP: Expanded General Pattern) bezeichnet. Ein EGP besteht sowohl aus Synchronisiertem Verkehr als auch aus sich bewegenden breiten Staus (Bild 10).
Anwendungen der Drei-Phasen-Theorie
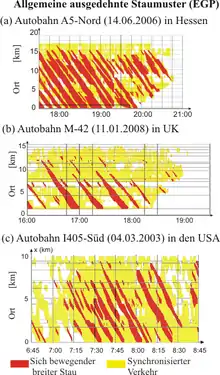
Eine der vielfach eingesetzten Anwendungen der Kerner’schen Drei-Phasen-Verkehrstheorie sind die Methoden ASDA/FOTO (Automatische StauDynamikAnalyse und Forecasting Of Traffic Objects). ASDA/FOTO ist ein Software-Werkzeug, das große Verkehrsdatenmengen auch für größere Schnellstraßennetze schnell und effizient verarbeiten kann (siehe Beispiele aus drei Ländern, Bild 10). ASDA/FOTO wird in einem Online-Verkehrssystem basierend auf Verkehrsmessungen eingesetzt. Zur Erkennung, Verfolgung und Prognose der jeweiligen Verkehrsphasen S und J werden dabei die Eigenschaften aus der Kerner’schen Theorie verwendet und in den Modellen ASDA/FOTO in einem Software-Werkzeug umgesetzt, das große Verkehrsdatenmengen auch in größeren Schnellstraßennetzen schnell und effizient verarbeiten kann (siehe Beispiele aus drei Ländern, Bild 10).
Weitere Anwendungsmöglichkeiten der Theorie, die in den beiden Büchern von Kerner beschrieben werden[4][6] sind neben der Entwicklung von Modellen für die Verkehrssimulation beispielsweise eine Zuflussregelung (ANCONA), kollektive Verkehrssteuerung, Fahrerassistenz und Verkehrszustandserkennung im Fahrzeug.
Kritik an der Theorie
Die Theorie wurde hauptsächlich aus zwei Gründen kritisiert. Erstens wurde die Theorie fast vollständig auf Messungen an der Bundesautobahn 5 in Deutschland gestützt. Es könne also sein, dass auf dieser Schnellstraße diese Muster auftreten, andere Straßen in anderen Ländern jedoch andere Charakteristika aufweisen. Zukünftige Forschung müssen also die Gültigkeit der Theorie auf anderen Straßen in anderen Ländern der Welt zeigen. Zweitens ist nicht klar, wie die Daten interpoliert wurden. Kerner verwendet Messungen an bestimmten Stellen entlang der Straße (Schleifendetektoren), zieht aber Schlussfolgerungen bezüglich Fahrzeugtrajektorien, die entlang der gesamten Länge der untersuchten Straße verlaufen. Diese Trajektorien können direkt nur unter Verwendung von Floating-Car-Daten gemessen werden, aber es sind, wie gesagt, nur Messungen von Schleifendetektoren benutzt worden. Wie die Daten zwischen den Detektorpositionen interpoliert wurden, ist nicht klar.
Auf obige Kritik wurde jüngst mit einer Untersuchung von in den USA und im Vereinigten Königreich gemessenen Daten geantwortet, welche die Schlussfolgerungen bestätigt, die aus Messergebnissen von der Bundesautobahn 5 in Deutschland gezogen wurden [7]. Darüber hinaus liegt eine neuere Untersuchung der Theorie basierend auf Floating-Car-Daten vor [10], in der man auch Methoden zur zeitlich-räumlichen Interpolation von Detektordaten finden kann (vgl. die Anhänge des Artikels).
Weitere Kritiken wurden geäußert, wie z. B. dass der Phasenbegriff nicht wohldefiniert sei, oder dass auch sogenannte Zweiphasenmodelle erfolgreich die wesentlichen, von Kerner beschriebenen Eigenschaften des Verkehrs nachbilden.[11] Letzterer Kritik wurde in einem Übersichtsartikel[9] wie folgt entgegnet: Die wichtigste Eigenschaft der Kerner’schen Theorie ist ihre Erklärung der grundlegenden empirischen Eigenschaften des Verkehrszusammenbruches durch den F→S-Übergang. Die grundlegenden empirischen Eigenschaften des Verkehrszusammenbruches können nicht mit früheren Theorien des Verkehrsflusses, wozu auch die in[11] betrachteten Zweiphasenmodelle gehören, erklärt werden. Weitere Details sind im nächsten Abschnitt zu finden.
Inkommensurabilität der Drei-Phasen-Verkehrstheorie und klassischer Theorien des Verkehrsflusses
Die Erklärung des Verkehrszusammenbruches an einer Engstelle durch einen F→S-Übergang in metastabilem freiem Verkehr ist die Grundannahme der Kerner’schen Drei-Phasen-Theorie [9]. Keine frühere Theorie bezieht den F→S-Übergang in metastabilem freiem Verkehr an einer Engstelle mit ein. Daher ist keine der klassischen Theorien des Verkehrsflusses konsistent mit den empirischen Eigenschaften des Verkehrszusammenbruches an einer Engstelle einer Schnellstraße.
Der F→S-Phasenübergang in metastabilem freiem Verkehr an einer Engstelle erklärt den empirisch nachgewiesenen induzierten Übergang vom freien zum Synchronisierten Verkehr zusammen mit der Abhängigkeit der Wahrscheinlichkeit des Zusammenbruches vom Verkehrsfluss. In Übereinstimmung mit dem klassischen Buch von Kuhn[12] zeigt dies die Inkommensurabilität der Drei-Phasen-Theorie und klassischer Theorien des Verkehrsflusses (mehr Details sind in[13] zu finden):
Die minimale Straßenkapazität , bei der ein F→S-Phasenübergang gemäß der Kerner’schen Theorie noch an einer Engstelle induziert werden kann, hat keinen Sinn für andere Theorien und Modelle des Verkehrsflusses.
Der Begriff „Inkommensurabilität“ wurde von Kuhn in seinem klassischen Buch[12] eingeführt, um einen Paradigmenwechsel in einem wissenschaftlichen Feld zu erklären.
Weiterhin muss bemerkt werden, dass die Existenz der zwei Phasen F und S bei demselben Verkehrsfluss nicht aus der stochastischen Natur des Verkehrs resultiert: selbst wenn es keine stochastischen Prozesse im Verkehr gibt, existieren die Zustände F und S bei demselben Verkehrsfluss. Andererseits berücksichtigen klassische stochastische Ansätze der Verkehrssteuerung nicht die Möglichkeit des F→S-Phasenübergangs in metastabilem freiem Verkehr. Aus diesem Grund können diese stochastischen Ansätze nicht das Problem der Inkonsistenz klassischer Theorien mit den grundlegenden empirischen Eigenschaften des Verkehrszusammenbruches lösen.
Kerner zufolge kann diese Inkonsistenz erklären, warum Ansätze zur Netzoptimierung und Verkehrssteuerung, die auf diesen Grundlagen und Methoden fußen, in der praktischen Anwendung gescheitert sind. Selbst jahrzehntelange intensive Bemühungen der Verbesserung und Validierung von Modellen zur Netzoptimierung blieben ohne Erfolg. Tatsächlich liegen keine Beispiele vor, dass Online-Implementierungen der Modelle zur Netzoptimierung basierend auf diesen Grundlagen und Methoden gestauten Verkehr in echten Verkehrs- und Transportnetzen reduzieren konnten.
Dies liegt an der Tatsache, dass die grundlegenden empirischen Eigenschaften des Verkehrszusammenbruches an Engstellen von Schnellstraßen erst während der letzten 20 Jahre verstanden worden sind. Dagegen sind die allgemein akzeptierten Grundlagen und Methoden der Transport- und Verkehrstheorie in den 1950–1960er Jahren eingeführt worden. Beispiele für diese klassischen Theorien des Verkehrsflusses sind das Lighthill-Whitham-Richards-Modell (LWR),[14][15] das General Motors-Verkehrsflussmodell (GM) von Herman, Gazis, Montroll, Potts und Rothery[16][17] sowie die Wardrop’schen Prinzipien der Optimierung von Transportnetzen [18]. Daher konnten die Wissenschaftler, deren Ideen zu diesen klassischen Grundlagen und Methoden der Transport- und Verkehrstheorie führten, die grundlegenden empirischen Eigenschaften des Verkehrszusammenbruches nicht kennen. Es sei bemerkt, dass einige der vielfältigen Eigenschaften des Fahrerverhaltens, die mit dem echten Verkehr zusammenhängen, sowie einige mathematische Ansätze zur Verkehrsflussmodellierung, die in klassischen Ansätzen der Theorie des Verkehrsflusses enthalten sind, auch in der Drei-Phasen-Verkehrstheorie und mit ihr verbundenen Verkehrsflussmodellen verwendet werden (weitere Details sind in Abschnitt 11 des Übersichtsartikels[9] zu finden).
Einzelnachweise
- Boris S. Kerner, "Experimental Features of Self-Organization in Traffic Flow", Physical Review Letters, 81, 3797-3400 (1998)
- Boris S. Kerner, "The physics of traffic", Physics World Magazine 12, 25-30 (August 1999)
- Boris S. Kerner, "Congested Traffic Flow: Observations and Theory", Transportation Research Record, Vol. 1678, pp. 160–167 (1999) (Memento des Originals vom 9. Dezember 2012 im Webarchiv archive.today) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- B.S. Kerner, The Physics of Traffic, Springer, Berlin, New York 2004
- B.S. Kerner, V.V. Osipov: Autosolitons. Springer, 1994, ISBN 978-94-017-0825-8.
- B.S. Kerner, Introduction to Modern Traffic Flow Theory and Control: The Long Road to Three-Phase Traffic Theory, Springer, Berlin, New York 2009
- Hubert Rehborn, Sergey L. Klenov, Jochen Palmer, "An empirical study of common traffic congestion features based on traffic data measured in the USA, the UK, and Germany". Physica A: Statistical Mechanics and its Applications, Volume 390, Issues 23–24, 1 November 2011, Pages 4466-4485.
- R.-P. Schäfer et al., "A study of TomTom’s probe vehicle data with three-phase traffic theory". Traffic Engineering and Control, Vol 52, No 5, Pages 225-231, 2011
- Boris S. Kerner, "Criticism of generally accepted fundamentals and methodologies of traffic and transportation theory: A brief review", Physica A: Statistical Mechanics and its Applications 392, 5261–5282 (2013). doi:10.1016/j.physa.2013.06.004
- Boris S. Kerner, Hubert Rehborn, Ralf-Peter Schäfer, Sergey L. Klenov, Jochen Palmer, Stefan Lorkowski, Nikolaus Witte. „Traffic dynamics in empirical probe vehicle data studied with three-phase theory: Spatiotemporal reconstruction of traffic phases and generation of jam warning messages“. Physica A: Statistical Mechanics and its Applications 392, 221–251 (2013).
- M. Treiber, A. Kesting, D. Helbing, "Three-phase traffic theory and two-phase models with a fundamental diagram in the light of empirical stylized facts". Transportation Research Part B: Methodological 44, 983–1000 (2010). doi:10.1016/j.trb.2010.03.004.
- T.S. Kuhn, "The structure of scientific revolutions". Fourth edition. (The University of Chicago Press, Chicago, London 2012)
- Boris S. Kerner, Sergey L. Klenov, and Michael Schreckenberg, "Probabilistic physical characteristics of phase transitions at highway bottlenecks: Incommensurability of three-phase and two-phase traffic-flow theories" Phys. Rev. E 89, 052807 (2014). doi:10.1103/PhysRevE.89.052807
- M.J. Lighthill and G.B. Whitham, “On kinematic waves: Theory of traffic flow on long crowded roads”. Proc. Roy. Soc. A, 229, 281-345 (1955)
- Paul I. Richards: Shock Waves on the Highway. In: Operations Research. 4, 1956, S. 42, doi:10.1287/opre.4.1.42.
- Robert Herman, Elliott W. Montroll, Renfrey B. Potts, Richard W. Rothery: Traffic Dynamics: Analysis of Stability in Car Following. In: Operations Research. 7, 1959, S. 86, doi:10.1287/opre.7.1.86.
- Denos C. Gazis, Robert Herman, Richard W. Rothery: Nonlinear Follow-the-Leader Models of Traffic Flow. In: Operations Research. 9, 1961, S. 545, doi:10.1287/opre.9.4.545.
- J G WARDROP: ROAD PAPER. SOME THEORETICAL ASPECTS OF ROAD TRAFFIC RESEARCH.. In: Proceedings of the Institution of Civil Engineers. 1, 1952, S. 325, doi:10.1680/ipeds.1952.11259.
Weblinks
- Physics Today - November 2005 by Henry Lieu (Federal Highway Administration, McLean, Virginia), Reviewer of the book "The Physics of Traffic: Empirical Freeway Pattern Features, Engineering Applications, and Theory" by Boris S. Kerner.
- Gao, K., Jiang, R., Hu, S-X., Wang, B-H. & Wu, Q. S. "Cellular-automaton model with velocity adaptation in the framework of Kerner's three-phase traffic theory" Phys. Rev. E 76,026105 (2007).
- M. Schönhof, D. Helbing, "Criticism of three-phase traffic theory". Transportation Research Part B: Methodological 43 (7): 784–797 (2009). doi:10.1016/j.trb.2009.02.004.
- H. Rehborn, S. Klenov, "Traffic Prediction of Congested Patterns", In: R. Meyers (Ed.): Encyclopedia of Complexity and Systems Science, Springer New York, 2009.
- H. Rehborn, J. Palmer, "Using ASDA and FOTO to generate RDS/TMC traffic messages", Traffic Engineering and Control, July 2008, S. 261–266.
- L. C. Davis, A review on the book by B.S. Kerner "Introduction to Modern Traffic Flow Theory and Control" in Physics Today, Vol. 63, Issue 3 (2010), S. 53
- M. Treiber, A. Kesting, D. Helbing, "Three-phase traffic theory and two-phase models with a fundamental diagram in the light of empirical stylized facts". Transportation Research Part B: Methodological 44, 983–1000 (2010). doi:10.1016/j.trb.2010.03.004.
- H. Hartenstein, A review on the book by B.S. Kerner "Introduction to Modern Traffic Flow Theory and Control" in IEEE Vehicular Technology Magazine, Vol. 5, Issue 3 (2010), S. 91.