Zweimassenschwungrad
Das Zweimassenschwungrad (ZMS) ist Bestandteil des Triebstrangs moderner Fahrzeuge (Pkw, Bus, Nutzfahrzeuge) und dient zur Reduzierung von Drehschwingungen.

Hintergrund
Bei Hubkolbenmotoren führt der periodische Ablauf der beschleunigten Kolbenbewegung und der Gaskräfte beim Ansaugen, Verdichten, Arbeiten und Ausstoßen in Kombination mit der Zündfolge der einzelnen Zylinder zu Drehungleichförmigkeiten der Kurbelwelle und des (angeschlossenen) Schwungrades. Da der Antriebsstrang aufgrund des Trägheitsmoments der rotierenden Bauteile und der Steifigkeiten ein drehschwingungsfähiges Gebilde (mit charakteristischen Eigenfrequenzen) ist, führen die vom Motor eingeleiteten Drehungleichförmigkeiten zwangsläufig zu Drehschwingungen.
Durchfährt man mit einem Motor ohne Zweimassenschwungrad resonanzkritische Drehzahlen, so kann es zu Überhöhungen der Drehschwingungsamplituden kommen. Diese können sowohl das schädliche Getrieberasseln auslösen als auch über die Lagerung von Motor- und Antriebsstrangkomponenten die Karosseriestruktur zu Schwingungen anregen, die sich bis in den Fahrgastraum als Brumm-, Wummer-, Heulgeräusche usw. fortpflanzen können.
Die Drehschwingungen können konstruktiv gemindert werden. Früher wurden dazu ausschließlich Kupplungen mit Torsionsdämpfer verwendet. 1985 wurde das erste Zweimassenschwungrad von der Firma LuK am Markt eingeführt.
Aufbau
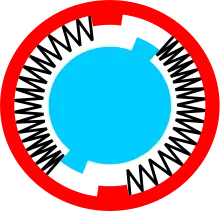
schwarz: Bogenfedern
rot: Schwungrad, Kurbelwellen-Seite
blau: Schwungrad, Getriebe-Seite
Während die konventionelle Schwungmasse eines Verbrennungsmotors aus den Teilen des Kurbeltriebes, dem Schwungrad und der Kupplung besteht, teilt sich ein Zweimassenschwungrad auf in
- eine primäre Schwungmasse (motorseitig) und
- eine sekundäre Schwungmasse (getriebeseitig).
Diese sind torsionsweich verbunden durch einen Drehschwingungsdämpfer, in der Regel eine Kombination aus Gleitlagern und in Fett gelagerten Bogenfedern. Diese isolieren wegen ihrer extreme Länge die auftretenden Schwingungen deutlich besser als Kupplungsdämpferfedern.
Waren in der ersten Generation noch vier Bogenfedern unter jeweils etwa 80° Winkelversatz montiert, so haben die neueren Generationen meist zwei Bogenfedern unter jeweils etwa 170° oder zwei Feder-Sets (bestehend aus einer Innen- und Außen-Bogenfeder, die gegenläufig gewickelt sind).
Wirkungsweise
Durch die Aufteilung in die Primärschwungmasse auf der Motorseite und die Sekundärschwungmasse auf der Getriebeseite wird das Massenträgheitsmoment der drehenden Getriebeteile erhöht. Durch eine gezielte „weiche“ Abstimmung der Federeinheiten wird die Resonanzfrequenz des ZMS deutlich unter die Leerlaufdrehzahl des Motors und der anregenden Motorordnungen verlagert. Dadurch findet eine Drehschwingungsentkopplung des Motors vom Antriebsstrang statt. Das ZMS wird dann im überkritischen Zustand betrieben und wirkt als mechanischer Tiefpassfilter: Die Drehungleichförmigkeiten des Motors werden durch das ZMS „geschluckt“ oder nur sehr abgeschwächt übertragen. Durch diesen maschinendynamischen „Trick“ kann beim Einsatz eines ZMS grundsätzlich auf ein Dämpferelement verzichtet werden.
Der kritische Resonanzbereich wird also nur beim Start des Motors schnell durchlaufen. Das ist besonders wichtig, da im Bereich der Torsionsresonanz keine Drehschwingungsentkopplung, sondern eine Verstärkung vorliegt. Da ein Betrieb in diesem Drehzahlbereich zum Zerstören des ZMS führen kann, haben viele Motorsteuerungen eine Funktion integriert, die das durch gezieltes Abstellen des Motors verhindert.
Um die Entkopplungseigenschaften eines ZMS in einem möglichst breiten Betriebsbereich des Motorkennfelds nutzen zu können, werden Federn mit mehrstufigen Federsteifigkeiten eingesetzt, z. B. durch den Einsatz zweier konzentrisch ineinander angeordneter Einzelfedern.
Untersuchungen haben gezeigt, dass die Lage der Eigenfrequenz des ZMS von der Drehzahl abhängt.[1] Ursache hierfür sind die Zentrifugalkräfte, die zu einer Anpressung der Bogenfedern an ihrer äußeren Lagerung führen. Die wirkenden Reibkräfte verhindern dann ein Einfedern dieser Windungen, wodurch es zu einer Versteifung kommt, welche die Eigenfrequenz ansteigen lässt. Solange die veränderte Eigenfrequenz jedoch unterhalb der Motordrehzahl liegt, tritt keine Resonanz auf.
Vorteile
Durch die Drehschwingungsentkopplung werden folgende positive Effekte erzeugt:
- Schwingungsentkopplung über den (gesamten) Drehzahlbereich
- hoher Geräuschkomfort (gleichmäßigerer Getriebelauf, geringere Anregung der Fahrzeugstruktur)
- Getriebeschonung durch Reduzierung von Drehmomentspitzen
- Reduzierung des Kraftstoffverbrauchs, da niedertouriger (= im niedrigeren Drehzahlbereich) gefahren werden kann
- höhere Lebensdauer der Antriebsstrangkomponenten
- geringer Bauraumbedarf (gleicht ungefähr dem einer Doppelkupplung).
Nachteile
- geringere Laufleistung gegenüber einer Standardkupplung
- hohe Reparaturkosten
- thermische Belastung
- begrenztes Drehmoment.
Alternative Reparaturlösung
Der Automobilzulieferer Valeo hat Anfang 2007 eine Alternative zum ZMS entwickelt, benannt 4KKit. Dabei handelt es sich um einen Teilesatz aus starrem Schwungrad, Kupplungsscheibe mit Verdrehmechanismus ähnlich dem ZMS sowie Druckplatte und Ausrücklager.
Hersteller
Die Grundidee des ZMS ist von mehreren Herstellern in verschiedenen Varianten weiterentwickelt und in Produkten umgesetzt worden:
Quellen
- A. Nicola, B. Sauer: Experimentelle Untersuchung des Dynamikverhaltens torsionselastischer Antriebselemente. In: Automobiltechnische Zeitschrift. (ATZ), Ausgabe 02/2006, Vereinigte Fachverlage Mainz.