Zustandsregelung
Eine Zustandsregelung ist ein Regelkreis, der die Regelgröße basierend auf der Zustandsraumdarstellung regelt. Dabei wird – anders als bei einer klassischen Regelung – nicht (nur) die Regelgröße zurückgeführt, sondern (auch) der interne Zustand der Regelstrecke (in Form von Zustandsgrößen). Daher wird das Verfahren auch Regelung durch Zustandsrückführung genannt.
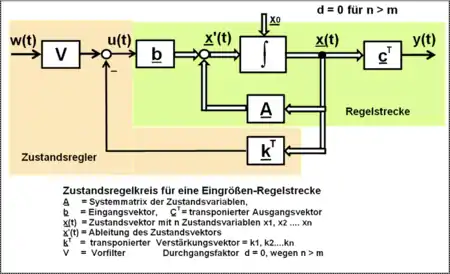
Verbreitet werden mehrschleifige Zustandsregler eingesetzt. Dabei werden mehrere Zustandsgrößen zurückgeführt, die sich jeweils aus der Integration der vorherigen Zustandsgröße ergeben. Ein Beispiel hiefür ist die Lageregelung eines Zylinderantriebs, bei der nicht nur die Lage bzw. Position des Zylinderkolbens zurückgeführt wird, sondern auch die Geschwindigkeit und die Beschleunigung, aus denen sich die Lage durch (zweimalige) Integration ergibt.
Voraussetzung für den Einsatz eines Zustandsreglers ist die Steuerbarkeit des Systems. Eine beliebte Methode im Zusammenhang mit Zustandsreglern ist die Polvorgabe.
Anwendung
Zustandsregelungen kommen in Systemen zum Einsatz, für die eine Berechnung des Reglers im Frequenzraum nicht oder nur unter Schwierigkeiten anwendbar ist. Dies sind vor allem nichtlineare (auch um Arbeitspunkte nicht oder nur schwer linearisierbare) sowie zeitvariante Systeme ebenso wie Mehrgrößensysteme. Zustandsregelungen werden vor allem dann eingesetzt, wenn schnelle Regelungen mit hoher Regelgüte gefordert sind.
Ermittlung der Zustandsgrößen
Die Rückkopplung, die zusammen mit der Regelstrecke den Regelkreis bildet, geschieht in der Zustandsregelung über eine Messeinrichtung und den eigentlichen Zustandsregler. Letzterer wird auch Rückführmatrix genannt. Deshalb handelt es sich bei einem Zustandsregler immer um einen Proportional-Regler.
Weil die Messung von Zustandsgrößen sehr aufwendig (und damit teuer) oder gar technisch nicht umsetzbar ist, wird die Messeinrichtung in der Praxis oft durch einen Beobachter ersetzt, welcher der Regelstrecke zu folgen versucht. Der Beobachter besteht analog zur Regelstrecke aus einer Beobachter-Zustands-Differenzialgleichung, einer Beobachter-Ausgangsgleichung und dem Beobachtungsvektor. Der Ausgang des Beobachters wird mit dem Ausgang der Regelstrecke verglichen, die Differenz wirkt über den Beobachtungsvektor auf die Beobachter-Zustands-DGL.
Siehe auch
Literatur
- Holger Lutz, Wolfgang Wendt: Taschenbuch der Regelungstechnik mit MATLAB und Simulink, 12. Auflage, Verlag Europa-Lehrmittel, 2021, ISBN 978-3-8085-5870-6.