Steuerbarkeit
Ein System ist vollständig steuerbar, wenn ein Zustand in endlicher Zeit durch geeignete Stellsignale zu jedem beliebigen neuen Zustand überführt werden kann. Steuerbar ist ein System, wenn es von ausgewählten Anfangszuständen in ausgewählte Endzustände überführt werden kann. Die Steuerbarkeit beschreibt somit den Einfluss äußerer Eingangsgrößen (in der Regel der Steuergrößen) auf den inneren Systemzustand. Dabei wird zwischen Ausgangssteuerbarkeit und Zustandssteuerbarkeit unterschieden.
Umgangssprachlich wird die Vokabel steuerbar häufig benutzt im Sinne von regelbar. Fachsprachlich wird aber unterschieden zwischen steuerbar, beobachtbar und regelbar. Damit ein System regelbar ist, muss es sowohl möglich sein, seinen Zustand zu beobachten, als auch diesen zu steuern. Für die praktische Anwendung ist normalerweise Regelbarkeit relevant. Steuerbarkeit ist ein Aspekt davon.
Das Begriffspaar Steuerbarkeit und Beobachtbarkeit wurde nach[1] 1960 von Rudolf Kálmán eingeführt.
Definition
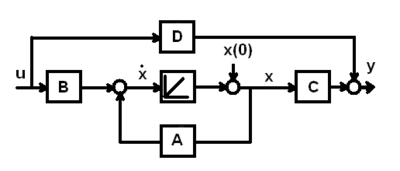
Ausgangspunkt für die Beurteilung der Steuerbarkeit eines linearen Systems ist die Zustandsraumdarstellung


mit der Systemmatrix , der Steuermatrix , der Beobachtungsmatrix , der Durchgangsmatrix , dem Zustandsvektor , dem Ausgangsvektor und dem Steuervektor .







Zur Ermittlung der Steuerbarkeit gibt es verschiedene, von der Form der Zustandsraumdarstellung abhängige, Kriterien.
Vollständige Steuerbarkeit
Vollständig zustandssteuerbar (teilweise auch erreichbar genannt) heißt ein lineares System, wenn es für jeden Anfangszustand eine Steuerfunktion gibt, die das System innerhalb einer beliebigen endlichen Zeitspanne in einen beliebigen Endzustand überführt.




Strukturelle Steuerbarkeit
Eine Klasse von Systemen heißt strukturell steuerbar, wenn es mindestens ein System gibt, das vollständig steuerbar ist.


Dabei sind Matrizen, in denen alle Elemente ungleich 0 mit * markiert wurden, da alle Elemente gleich 0 über die strukturelle Beobachtbarkeit und strukturelle Steuerbarkeit entscheiden. D. h. die det S muss ungleich 0 sein.
Steuerbarkeitskriterien
Vollständige Ausgangssteuerbarkeit
Das System ist genau dann vollständig ausgangssteuerbar,[2] wenn der Rang der Matrix


mit der Zahl der Ausgangsgrößen übereinstimmt: Bedingung für Ausgangssteuerbarkeit ist also Rang . Unter der Voraussetzung, dass Rang(C) = r gilt, ist jedes zustandssteuerbare System auch ausgangssteuerbar. Die Umkehrung gilt dabei nicht.

Kriterium von Kalman
Das System ist genau dann nach Kalman vollständig steuerbar,[3] wenn für die Steuerbarkeitsmatrix


gilt
- .

Im Spezialfall ist für steuerbare Systeme sogar invertierbar, was Voraussetzung für die Verwendung der Formel von Ackermann zur Polvorgabe für Eingrößensysteme ist. Die Zustandssteuerbarkeit nach Kalman ist ein Spezialfall der vollständigen Ausgangssteuerbarkeit für .



Kriterium von Gilbert
Das System , dessen Zustandsraummodell in kanonischer Normalform vorliegt, ist genau dann nach Gilbert[4] vollständig steuerbar, wenn die Matrix keine Nullzeile besitzt und wenn die p Zeilen , der Matrix , die zu den kanonischen Zustandsvariablen eines p-fachen Eigenwerts gehören, linear unabhängig sind.




ist dabei die Matrix der zu den Eigenwerten gehörenden Eigenvektoren der Matrix , mit .


Kriterium von Hautus
Das System (A,B) ist genau dann nach Hautus vollständig steuerbar,[5] wenn die Bedingung

für alle Eigenwerte der Matrix A erfüllt ist.

Steuerbarkeit von Abtastsystemen
Die oben genannten Beziehungen gelten auch für Abtastsysteme, wenn durch die Transitionsmatrix und durch die diskrete Eingangsmatrix ersetzt wird. Nach[6] kann die Überprüfung vereinfacht werden, indem zunächst die Bedingungen für das kontinuierliche System geprüft werden und dann die Zusatzbedingung

- für


erfüllt ist.
Regelungsnormalform (Frobenius-Form)
Die Regelungsnormalform kann unter anderem aus der Übertragungsfunktion: einfach bestimmt werden. Für gilt:




bzw. für Systeme ohne Ableitungen der Eingangsgröße

Die spezielle Form von und ist hilfreich für die Analyse und die Konstruktion von Zustandsreglern.


Nichtlineare Steuerbarkeit und Flachheit
Im Nichtlinearen kann man keine globale Aussagen zur Steuerbarkeit machen und muss diese immer an einen Gültigkeitsbereich koppeln. Besondere Rolle spielt hier der mathematische ad-Operator.
Deshalb erweitert die Systemeigenschaft der Flachheit die Steuerbarkeit auf den nichtlinearen Fall. Im linearen Fall sind steuerbare Systeme auch flach.
Vorsicht ist jedoch beim Schließen auf die Steuerbarkeit des nichtlinearen Systems aus der Linearisierung geboten. Ist die Linearisierung um einen Punkt steuerbar, so ist das nicht lineare System lokal um diesen Punkt steuerbar. Ist jedoch die Linearisierung nicht steuerbar, kann das System trotzdem immer noch steuerbar sein.
Gründe für nicht vollständig steuerbare Systeme
Für die nicht vollständige Steuerbarkeit gibt es zwei wesentliche Gründe:[7]
- Eigenvorgänge, die nicht mit dem Eingang verbunden sind, sind nicht steuerbar.
- Zwei parallele Teilsysteme mit denselben dynamischen Eigenschaften sind nicht vollständig steuerbar.
Gründe für die Untersuchung
Das Steuerbarkeitskriterium kann auch genutzt werden um eine Regelungsaufgabe zu vereinfachen. Wird nicht die Stellgröße, sondern die Störgröße auf ihre Steuerbarkeit hinsichtlich der Regelgröße untersucht, so zeigt eine Nichtsteuerbarkeit, dass dieser Systemteil dem Störeinfluss nicht unterliegt und somit dieser Teil nicht geregelt werden muss, wenn nur die Störung unterdrückt werden soll. Andererseits kann eine Störgröße nicht kompensiert werden, wenn ein Systemteil durch die Störgröße aber nicht durch die Stellgröße steuerbar ist.
Die Eigenschaft der Nichtsteuerbarkeit der Störgröße wird für einige Regelungsverfahren genutzt. So wird bei der Störentkopplung der Regler so entwickelt, dass die Stellgröße nicht mehr von der Störgröße abhängt.
Einzelnachweise
- Otto Föllinger: Regelungstechnik, Einführung in die Methoden und ihre Anwendung. 8. Auflage. Hüthig Verlag, Heidelberg 1994, ISBN 3-7785-2336-8., Abschn. 12.3.1
- Lunze, Jan: Regelungstechnik 2: Mehrgrößensysteme Digitale Regelung. S. 84, 4. Aufl. Heidelberg: Springer, 2006. – ISBN 3-540-32335-X
- Lunze, Jan: Regelungstechnik 2: Mehrgrößensysteme Digitale Regelung. S. 64, 4. Aufl. Heidelberg: Springer, 2006. – ISBN 3-540-32335-X
- Lunze, Jan: Regelungstechnik 2: Mehrgrößensysteme Digitale Regelung. S. 73, 4. Aufl. Heidelberg: Springer, 2006. – ISBN 3-540-32335-X
- Lunze, Jan: Regelungstechnik 2: Mehrgrößensysteme Digitale Regelung. S. 75, 4. Aufl. Heidelberg: Springer, 2006. – ISBN 3-540-32335-X
- Jürgen Ackermann: Abtastregelung; 1. Analyse und Synthese. 2. Auflage. Springer, Heidelberg 1983.
- Lunze, Jan: Regelungstechnik 2: Mehrgrößensysteme Digitale Regelung. S. 76, 4. Aufl. Heidelberg: Springer, 2006. – ISBN 3-540-32335-X