Wendegetriebe
Wendegetriebe sind „Schaltgetriebe, bei denen lediglich eine Drehrichtungsumkehr geschaltet werden kann“[1]. Solche Getriebe werden benötigt, wenn ein Antriebssystem zwei gleichwertige Drehrichtungen bereitstellen soll, die Umkehr sich jedoch nicht durch die Antriebsmaschine erzeugen lässt. Weiter lässt sich zwischen reinen Wendegetrieben und Wechsel‑Wendegetrieben unterschieden. Ein reines Wendegetriebe zeichnet sich dadurch aus, dass der Drehrichtungswechsel lediglich mit der Übersetzung eins schaltbar ist. Anderenfalls liegt ein Wechsel-Wendegetriebe vor[2].
Prinzipien
Die Umkehr der Drehrichtung ist durch folgende Getriebetypen erzeugbar:[2]
Zahnradgetriebe finden besonders häufig in der Industrie Anwendung, da diese Leistungen mit hohen Wirkungsgraden übertragen können. Dabei setzen sich die Verluste in Zahnradgetrieben aus den Verzahnungs-, Lager-, Dichtungs- und sonstigen Verlusten zusammen[3]. Diese Verluste sind im Vergleich zu anderen Getriebeformen besonders niedrig. Zudem zeichnen sich Zahnradgetriebe durch eine sehr hohe Leistungsdichte aus, da diese die Umfangskräfte mit der Normalkraft übertragen. Kraftschlüssige Getriebe übertragen die Umfangskraft lediglich mit der Reibkraft [4].


Variation der Stirnradanzahl
Die erste Grundidee für die Drehrichtungsumkehr mittels Zahnradgetrieben besteht darin, zwischen gerader und ungerader Stirnradanzahl zu wechseln. Dabei wird sich die Tatsache zu eigen gemacht, dass je Stirnradpaarung eine Drehrichtungsumkehr entsteht.
Vorgelegebauweise
Beim ersten Prinzip zur Drehrichtungsumkehr werden fünf Stirnzahnräder in Vorgelegebauweise angeordnet. Da alle Wellen ortsfest im Gehäuse gelagert sind, lassen sich Vorgelegegetriebe den Standgetrieben zuordnen. Die Vorgelegebauweise wird beispielsweise in Synchrongetrieben, Lastschaltgetrieben, Gruppengetrieben und Wendegetrieben als konstruktive Lösung verwendet.[5] Bei Wendegetrieben in Vorgelegebauweise kämmt stets ein Stirnräderpaar direkt ineinander und das übrige über ein Zwischenrad, welches auf der Vorgelegewelle gelagert ist. Im Leerlauf sind die Stirnräder durch Nadellager drehbar auf der Welle gelagert. Durch eine Synchroneinheit wird eines der Stirnräder mit der Welle verbunden und somit die Drehrichtung des Abtriebes geschaltet. Eine andere Möglichkeit zur Steuerung des Leistungsflusses stellt die axiale Verschiebung der Räder dar[2], allerdings darf in diesem Fall der Schrägungswinkel der Zahnräder nicht größer als 10° sein[6].
Wendeherz
Neben der Vorgelegebauweise ist die Variation der Radanzahl mit einem Wendeherz konstruierbar. Dieses ist rotatorisch am An- oder Abtriebsrad gelagert und besitzt einen Hebel, der Gleich-, Gegen- und Leerlauf ermöglicht. Während die Achsen des An- und Abtriebsrades translatorisch festgelagert sind, sind die Achsen der Zwischenräder aufgrund des Wendeherzes auf einer Kreisbahn verschiebbar. Die Zwischenräder befinden sich stets im Eingriff. Während das An- und Abtriebsrad im Gleichlauf lediglich über ein Zwischenrad verbunden ist, ist es im Gegenlauf über zwei Zwischenräder verbunden.
Ein Nachteil dieses Prinzips ist, dass das Wendegetriebe konstruktionsbedingt lediglich im Stillstand und lastfrei schaltbar ist. Nachteilig ist zudem, dass die im Zahnkontakt entstehenden Kräfte der Zwischenräder durch den langen Hebel große Haltekräfte erfordern. Außerdem ist das Prinzip anfällig für Temperaturverzug und Schwingungen. Im Vergleich zur Vorgelegebauweise sind die geringere Stirnradanzahl und die simple Natur der Schalthebelkonstruktion des Wendeherzes vorteilhaft.
Kegelradgetriebe
Die schaltbare Drehrichtungsumkehr ist ebenfalls mit Kegelrädern realisierbar. Eine Variante dieses Getriebeprinzips besteht aus drei Kegelrädern. Um Momente zur Leistungsverzweigung abzugreifen, sind weitere Kegelräder und Zapfen integrierbar. Weil die Achsen der Kegelräder in Relation zum Gehäuse ortsfest sind, zählen Kegelradwendegetriebe zu den Standgetrieben. Damit die An- und Abtriebsachse identisch ist, sind in der Regel zwei Kegelräder koaxial und werden durch ein orthogonales Zwischenkegelrad miteinander verbunden. Zwar muss das Zwischenkegelrad nicht orthogonal zu den Kegelrädern stehen, jedoch ergibt sich so der höchste Wirkungsgrad. Dabei ist es entscheidend, dass sich bei gerad- und schrägverzahnten Kegelrädern die Drehachsen in einem Punkt schneiden.
Zur Umkehrung der Drehrichtung wird das auf dem Antriebszapfen drehbar gelagerte Kegelrad mit der Antriebswelle verbunden. Um die Drehrichtung zu erhalten, werden die An- und Abtriebswelle direkt über die Kupplung miteinander verbunden. In diesem Fall ist die Übersetzung trivialerweise gleich eins. Neben den beiden Drehrichtungen ist zusätzlich eine Mittelstellung der Kupplung möglich, welche den Leistungsfluss zwischen An- und Abtriebswelle trennt. Diese Getriebeart kann in der Regel nur im Stillstand und lastfrei geschaltet werden, da die Räder meistens mit einer Klauenkupplung verbunden werden. Diese Kupplung wird über einen Handhebel oder Elektromotor betätigt.
Ist ein kleiner Achsversatz auszugleichen, werden sogenannte Hypoidradpaare oder Kegelschraubenradpaare benötigt[7]. Jedoch sinkt der Wirkungsgrad des Wendegetriebes mit steigendem Achsversatz, da die Geometrie einem Schneckengetriebe immer weiter ähnelt. Zudem muss zur direkten Verbindung von An- und Abtriebswelle eine Gelenkwellenkombination integriert werden. Große Achsversätze sind hingegen nur mit Schrauben-Stirnradgetrieben realisierbar[8]. Der Wirkungsgrad und das übertragbare Drehmoment wird maximiert, wenn die Übersetzung von Kegelradgetrieben eins ist und die geforderte Übersetzung anschließend eingebracht wird. Der Grund hierfür ist, dass Kegelradgetriebe Übersetzungen mit nur sehr schlechtem Wirkungsgrad umsetzen können.
Als Nachteile von Kegelradgetrieben lassen sich die zusätzlichen Fehlerquellen im Vergleich zu Stirnradgetrieben nennen. Kegelräder sind gegenüber Abweichungen des Schnittpunkts der Teilkegelwinkel besonders empfindlich. Diese Abweichungen führen zu einseitigem Tragen oder Klemmen und in letzter Folge zu Verschleiß, ungünstigem Geräuschverhalten sowie Erwärmung[8]. Zudem sind Kegelräder aufgrund von signifikanterem Härteverzug und Ausbiegungen bei fliegendem Ritzel gegenüber Stirnrädern schwieriger herstellerbar[7]. Vorteilhaft an Kegelradgetrieben ist dagegen die Tatsache, dass die An- und Abtriebswelle koaxial gewählt werden können.
Umlaufrädergetriebe
Aus Gründen einer gleichmäßigen Belastung existieren keine Umlaufrädergetriebe mit weniger als drei Planeten. Jedoch ist die genaue Anzahl der Planeten für die Übersetzung des Getriebes ohne Bedeutung. Bei ortsfestem Steg wird aus einem Umlaufrädergetriebe ein Standgetriebe, in allen anderen Fällen sind Mischformen aus Stand- und Umlaufgetrieben möglich. Aus kombinatorischen Gründen ergeben sich je nach festgehaltener Welle neun mögliche Bewegungszustände.[9]
Dies lässt sich ebenfalls im Satz von Willis erkennen:

Aus dem Satz lässt sich einfach erkennen, dass sich bei Umlaufrädergetrieben eine Drehrichtungsumkehr einstellen kann. Zudem folgt aus dem Satz, dass eine alleinige Drehrichtungsumkehr durch das Festhalten einer Welle stets mit einem ungleichen Übersetzungsbetrag für beide Drehrichtungen verbunden ist. Deshalb muss durch eine geschickte Verschaltung mehrerer Umlaufrädergetriebestufen darauf geachtet werden, dass der Übersetzungsbetrag für beide Drehrichtungen gleich ist. Solche Verschaltungen werden als Koppelgetriebe bezeichnet. In der Literatur ist ein Koppelgetriebe für konstante Übersetzung in beiden Drehrichtungen gezeigt[10].
Die Vorteile von Umlaufrädergetrieben liegen insbesondere darin, dass die Leistungsdichte hoch ist und ein vergleichsweise kleiner Bauraum benötigt wird. Im Vergleich zu Vorgelegegetrieben sind die komplizierte Herstellbarkeit und die schwieriger zu beherrschende Schmierölführung nachteilig[5]. Zudem ist unvorteilhaft, dass mindestens zwei Stufen notwendig sind. Vorteilhaft ist dagegen in vielen Fällen, dass die An- und Abtriebswelle koaxial sind.
Riemengetriebe
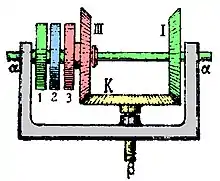
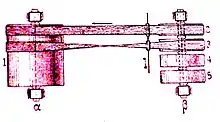
Ein weiteres Prinzip zur Änderung der Drehrichtung ist die kraftschlüssige Leistungsübertragung durch Riemen. Diese finden in einigen Werkzeugmaschinen Anwendung. Bei dem Prinzip befinden sich auf der Antriebswelle drei Riemenscheiben, wovon die beiden äußeren die doppelte Breite der inneren Scheibe besitzen. Die äußeren Scheiben sind drehbar- und die innere Scheibe festgelagert. Diese Scheiben werden durch einen offenen und einen gekreuzten Riemen mit der auf der Abtriebswelle befindlichen Riementrommel verbunden. Während der offene Riemen die Drehrichtung des An- und Abtriebs beibehält, wird die Drehrichtung durch den gekreuzten Riemen umgekehrt. Jene Trommel ist ebenso breit, wie die Summe der Scheibenbreiten.
Um die Drehrichtung zu schalten, werden beide Riemen gleichzeitig verschoben. In Abhängigkeit davon, welcher Riemen auf die feste mittige Scheibe geschoben wird, wird die Rotation umgekehrt oder beibehalten. Ebenfalls ist ein Leerlauf möglich, wenn sich beide Riemen auf den äußeren Scheiben befinden.
Damit sich der Riemen auf den Scheiben zentriert, weisen diese ein kreisbogenförmiges Profil auf. Dabei befindet sich die Zentrierung zwecks Zugmittelschonung auf der Abtriebsseite[11]. Durch Änderung der Trommel‑/Festscheibendurchmesser ist dieses Getriebeprinzip außerdem als Wechsel‑Wendegetriebe nutzbar.
Die Vorteile von Riementrieben liegen im Wesentlichen in der Einfachheit und den geringen Kosten für parallele und windschiefe Wellen. Zusätzlich sind diese Getriebe sehr geräuscharm und besitzen ein günstiges elastisches Übertragungsverhalten, welches für die Aufnahme von Stößen und zur Dämpfung sehr nützlich ist. Weiterhin besteht durch den Riemenriss ein Überlastungsschutz. Die Nachteile liegen dagegen in der hohen Lagerbelastung durch die erforderliche Vorspannung und die Drehzahlschwankungen aufgrund des Schlupfes mit kraftschlüssigen Zugmitteln. Ebenfalls nachteilig fällt die Erforderlichkeit von Nachspanneinrichtungen, die Empfindlichkeit gegenüber Temperatur, Feuchtigkeit, Staub, Schmutz und Öl und die relativ große Baugröße auf[12]. Zudem sind bei kraftschlüssigen Zugmitteln die verminderten übertragbaren Umfangskräfte bei steigender Umfangsgeschwindigkeit aufgrund von Fliehkräften ungünstig.[13]
Reibradgetriebe
Eine weitere Möglichkeit der schaltbaren Drehrichtungsumkehr bieten Reibräder. Bei diesem Ansatz ist die Antriebswelle schwimmend gelagert und steht senkrecht zur Abtriebswelle. Auf der Antriebswelle sind zwei Reibscheiben montiert. Zwischen diesen befindet sich das auf der Abtriebswelle gelagerte Reibrad.
Um die Drehrichtung zu ändern, wird die entgegenliegende Scheibe an das Rad angepresst. Außerdem ist ein Leerlauf möglich, wenn die Antriebsachse so positioniert wird, dass das Reibrad keinen Kontakt zu beiden Scheiben hat.
Wenn die Abtriebswelle ebenfalls schwimmend gelagert wird, ist es möglich, die Übersetzung zu variieren. Deshalb ist ein Reibradwendegetriebe als reines Wendegetriebe und als Wechselwendegetriebe realisierbar. Neben Scheiben sind ebenfalls Zylinder, Kegel oder Kugeln als Reibkörper umsetzbar. Alle haben jedoch gemeinsam, dass das Moment an den Kontaktstellen der Reibkörper durch tangentiale Reibungskräfte übertragen wird. Die maximal übertragbaren Momente sind auf der einen Seite von den Reibungszahlen und auf der anderen Seite von den Anpresskräften abhängig. Die Reibungszahlen hängen wiederum von den Werkstoffpaarungen und der Schmierung ab[14].
Die Vorteile des stoßfreien Anfahrens und geräuschlosen Laufs kommen besonders im Hebezeugbau zur Geltung. Die Nachteile von Reibrädern liegen in den stark abnutzenden Kontaktflächen und der daraus folgenden notwendigen Kontaktsicherung. Aufgrund des Verschleißes der Kontaktflächen und der Abhängigkeit von Normalkraft und übertragbarem Moment müssen die Anpresskräfte sehr groß sein, woraus eine starke Lagerbelastung folgt.[15]
Weitere Vorteile von Reibradgetrieben sind der vergleichsweise einfache Aufbau, der geringe Aufwand für die Wartung, der Überlastungsschutz durch das Durchrutschen sowie der einfach realisierbare stufenlosen Verstellung der Übersetzung. Als nachteilig ist der unvermeidbare Schlupf, die Begrenzung der Lebensdauer sowie die begrenzte übertragbare Leistung zu nennen.[16]
Flüssigkeitsgetriebe
Die bisher behandelten Prinzipien zeichnen sich durch Leistungsübertragung mithilfe eines Festkörperkontakts aus. Jedoch existieren ebenfalls Ansätze mit hydrodynamischer Leistungsübertragung. Diese bewährt sich besonders bei Kränen, Winden, Schaufelladern, Raupen und Rädertraktoren, Schienenfahrzeugen sowie Bohrfeldeinrichtungen[17].
Als Beispiel in der Schienenfahrzeugtechnik lassen sich Flüssigkeitsgetriebe nach Voith nennen. Diese bestehen aus zwei Föttinger-Wandlern mit je einem Pumpen-, Turbinen- und Leitrad. Während das Pumpenrad über das Gehäuse auf der Antriebswelle gelagert ist und der Flüssigkeit einen Drall aufprägt, treibt das Turbinenrad die Abtriebswelle an, indem dieses dem Betriebsmedium diesen Drall wieder entzieht. Die Leistungsübertragung findet folglich zwischen Pumpen- und Turbinenrad durch die Massenkräfte des Füllmediums statt, welches in den meisten Fällen ein Öl ist. Weil das Leitrad das vom Turbinenrad rückfließende Öl durch seine Schaufelform aufstaut, wird das auf die Abtriebswelle wirkende Moment vergrößert. Ist keine Drehmomentwandlung gewünscht, sind die Föttinger-Wandler durch Föttinger‑Kupplungen ersetzbar. Eben jene zeichnen sich dadurch aus, dass diese im Gegenteil zu Föttinger-Wandlern kein Leitrad besitzen.
Die Drehrichtungswechsel finden stoß- und verschleißfrei statt, indem der jeweilige Wandlerkreislauf gefüllt bzw. entleert wird. Bei Motorstillstand geht das Wendegetriebe selbsttätig in eine Neutralstellung über, sodass ein Leerlauf ebenfalls bei hohen Drehzahlen des Abtriebs möglich ist.
Ein Vorteil ist, dass das maximale Anlaufmoment begrenzbar ist[17]. Das Turbinenrad dreht aufgrund der Flüssigkeitsreibung etwa drei Prozent langsamer als das Pumpenrad. Daraus ergibt sich ein hoher Wirkungsgrad von etwa 97 %. Durch eine Dimensionierungsänderung oder Variierung des Betriebspunktes ergibt sich bei vergleichbarem Wirkungsgrad ein erheblich kleinerer Gehäuse- und Schaufeldurchmesser[18]. Weil die Schaufeldurchmesser mit der fünften Potenz und die Antriebsdrehzahl mit der dritten Potenz in die übertragbare Leistung eingehen, sind Turbowendegetriebe besonders bei hohen Drehzahlen wirtschaftlich[19]. Überdies ist vorteilhaft, dass sich durch den Schlupf ein Überlastungsschutz ergibt sowie die Kraftentfaltung besonders sanft ist.
Kombinationen
Es besteht zusätzlich die Möglichkeit die bereits vorgestellten Prinzipien zu kombinieren, um neue Lösungen zu erhalten. Ein Beispiel hierfür ist ein Bootswendegetriebe, welches sich eine schrägverzahnte Stirnradstufe und eine Kettenradstufe zu Nutze macht:
Um die Rotationsrichtung zu wechseln, werden Zahnradstufe und Welle mithilfe der Kupplung verbunden, auf diese Weise wird die Leistung über die Zwischenwelle übertragen. Die Rotation wird umgekehrt, weil bei einer Kettenstufe, im Gegenteil zur Zahnradstufe, keine Drehrichtungsumkehr eingebracht wird. Indem die Kupplung geschlossen wird, wird die Laufrichtung beibehalten.
Ein Vorteil von Kettenstufen besteht darin, dass diese, im Gegenteil zu kraftschlüssigen Lösungen, die Leistung in jedem Arbeitspunkt schlupflos übertragen. Als Nachteil sind hingegen die niedrigen maximalen Umfangsgeschwindigkeiten aufgrund von Schwingungs- und Geräuschanregung beim Eingriff zu bewerten.[20]
Einzelnachweise
- Johannes Looman: Zahnradgetriebe: Grundlagen, Konstruktionen, Anwendungen in Fahrzeugen. 3. neubearbeitete und erweiterte Auflage. Springer Berlin Heidelberg, Berlin, Heidelberg 1996, S. 22.
- Joseph Jehlicka, Egon Martyrer, August Schalitz: Kleines Lexikon: Getriebe und Kupplungen. In: DVA kleine technische Lexica. DVA Deutsche Verlags-Anstalt, Abt. Fachverlag, 1964, S. 246.
- Bertsche, B. (Bernd), Lechner, G. (Gisbert), Ryborz, Joachim., Novak, Wolfgang.: Fahrzeuggetriebe : Grundlagen, Auswahl, Auslegung und Konstruktion. 2., bearbeitete und erw. Auflage. Springer, Berlin 2007, ISBN 978-3-540-30670-2, S. 66.
- Grote, Karl-Heinrich; Bender, Beate; Göhlich, Dietmar: Dubbel: Taschenbuch für den Maschinenbau. 25., neu bearbeitete und aktualisierte Auflage. Berlin, ISBN 978-3-662-54804-2, S. G125.
- Pohlandt, Christian,: Grundlagen mobiler Arbeitsmaschinen. KIT Scientific Publishing, Karlsruhe 2014, ISBN 978-3-7315-0188-6, S. II-25.
- Winter, Hans: Maschinenelemente : Band 2: Getriebe allgemein, Zahnradgetriebe - Grundlagen, Stirnradgetriebe. Zweite, völlig neubearbeitete Auflage. Springer Berlin Heidelberg, Berlin, Heidelberg 2003, ISBN 978-3-662-11873-3, S. 273.
- Grote, Karl-Heinrich; Bender, Beate; Göhlich, Dietmar: Dubbel: Taschenbuch für den Maschinenbau. 25., neu bearbeitete und aktualisierte Auflage. Springer Berlin Heidelberg, Berlin, Heidelberg, ISBN 978-3-662-54804-2, S. G127.
- Haberhauer, Horst 1950-: Maschinenelemente : Gestaltung, Berechnung, Anwendung. 18., überarbeitete Auflage. Berlin, ISBN 978-3-662-53047-4, S. 571.
- Bertsche, B. (Bernd), Lechner, G. (Gisbert), Ryborz, Joachim., Novak, Wolfgang.: Fahrzeuggetriebe : Grundlagen, Auswahl, Auslegung und Konstruktion. 2., bearbeitete und erw. Auflage. Springer, Berlin 2007, ISBN 978-3-540-30670-2, S. 159–160.
- Looman, Johannes.: Zahnradgetriebe : Grundlagen, Konstruktionen, Anwendungen in Fahrzeugen. 3., neubearbeitete und erw. Aufl. 1996, Nachdruck in veränderter Ausstattung. Springer, Berlin 2009, ISBN 978-3-540-89460-5, S. 351.
- Haberhauer, Horst: Maschinenelemente : Gestaltung, Berechnung, Anwendung. 18., überarbeitete Auflage. Berlin 2018, ISBN 978-3-662-53047-4, S. 642.
- Haberhauer, Horst: Maschinenelemente : Gestaltung, Berechnung, Anwendung. 18., überarbeitete Auflage. Berlin, ISBN 978-3-662-53047-4, S. 629–630.
- Grote, Karl-Heinrich; Bender, Beate; Göhlich, Dietmar: Dubbel: Taschenbuch für den Maschinenbau. 25., neu bearbeitete und aktualisierte Auflage. 25. Auflage. Springer Berlin Heidelberg, Berlin, Heidelberg, ISBN 978-3-662-54804-2, S. G111.
- Haberhauer, Horst: Maschinenelemente : Gestaltung, Berechnung, Anwendung. 18., überarbeitete Auflage. Berlin, ISBN 978-3-662-53047-4, S. 612.
- Holzt, Alfred Conrad Udo: Die Schule des Maschinentechnikers: Die Hebe- und Transport-Maschinen: Lehrbuch zum Selbstunterricht im Maschinenbau. Hrsg.: Heepke, Wilhelm. Verlag von Moritz Schäfer, Buchhandlung, Leipzig 1911, S. 50.
- Haberhauer, Horst: Maschinenelemente : Gestaltung, Berechnung, Anwendung. 18., überarbeitete Auflage. Berlin, ISBN 978-3-662-53047-4, S. 613.
- Kickbusch, Ernst: Föttinger-Kupplungen und Föttinger-Getriebe : Konstruktion und Berechnung. Berlin, Heidelberg, ISBN 978-3-642-52434-9, S. 173.
- Kickbusch, Ernst: Föttinger-Kupplungen und Föttinger-Getriebe : Konstruktion und Berechnung. Berlin, Heidelberg, ISBN 978-3-642-52434-9, S. 7.
- Grote, Karl-Heinrich; Bender, Beate; Göhlich, Dietmar: Dubbel: Taschenbuch für den Maschinenbau. 25., neu bearbeitete und aktualisierte Auflage. Berlin, ISBN 978-3-662-54804-2, S. R53.
- Grote, Karl-Heinrich; Bender, Beate; Göhlich, Dietmar: Dubbel: Taschenbuch für den Maschinenbau. 25., neu bearbeitete und aktualisierte Auflage. Berlin, ISBN 978-3-662-54804-2, S. G118.