Systemidentifikation
Systemidentifikation (auch Systemidentifizierung) ist die theoretische und/oder experimentelle Ermittlung der quantitativen Abhängigkeit der Ausgangs- von den Eingangsgrößen eines Systems. Dazu wird das System mit definierten Testsignalen (Sprung, Impuls, Rampe o. Ä.) angeregt und der Ausgang aufgezeichnet. Die zur mathematischen Auswertung angewandten Verfahren können deterministisch oder stochastisch sein.
Theoretische Systemidentifikation
Bei der theoretischen Systemidentifikation erfolgt die Modellbildung auf der Grundlage von Bilanzgleichungen unter Berücksichtigung von Erhaltungssätzen. Das Ergebnis ist ein die Beziehung zwischen Ein- und Ausgangsgrößen beschreibendes Differentialgleichungssystem. Im Fall eines linearen, zeitinvarianten Systems gilt:

und, da in diesem Fall die Laplace-Transformation durchführbar ist, gilt für die Übertragungsfunktion
- .

Sind alle Koeffizienten und bekannt, ist die Identifizierungsaufgabe gelöst. Ansonsten müssen die unbekannten Koeffizienten durch die experimentelle Systemidentifikation bestimmt werden.


Experimentelle Systemidentifikation
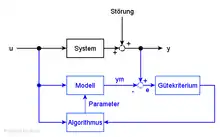
Das System wird mit geeigneten Testsignalen (Sprung, Impuls, Rampe o.a.) angeregt. Diese Signale werden außerdem einem mathematischen Modell, welches freie Parameter hat, zugeführt. Das Modell ist aus einer vorhergehenden theoretischen Prozessidentifikation bekannt. Das Modell kann entweder im Zeitbereich oder im Frequenzbereich vorliegen. Aus beiden Ausgangssignalen (System und Modell) wird die Abweichung (Differenz) berechnet und von einem Gütekriterium in Form eines Funktionals bewertet. Das Ergebnis der Bewertung wird von einem Algorithmus benutzt, um die Parameter des Modells anzupassen. Dieser Prozess wird solange wiederholt, bis die gewünschte Güte erreicht ist.

Die iterative Anpassung der Modellparameter kann durch Unterstützung entsprechender Softwarewerkzeuge verkürzt werden.
Wendetangentenverfahren
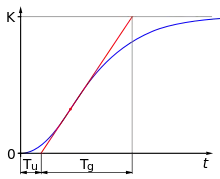


Ein System mit Ausgleich und ohne Überschwingen hat einen Wendepunkt in der Sprungantwort. Es tritt bei Systemen mit der Reihenschaltung mehrerer Verzögerungselemente (PT1-Glieder) auf. Durch Anlegen der Tangente an den Wendepunkt können die Verzugszeit und die Ausgleichszeit bestimmt werden. Ziel ist aus diesen experimentell ermittelten Werten des Systems die Zeitkonstanten der Übertragungsfunktion des Modells zu ermitteln. Die Modellfunktion muss ebenfalls ein System mit Ausgleich beschreiben und die Sprungantwortfunktion des Modells in analytischer Form vorliegen.


Prinzip
Aus der Übertragungsfunktion des Modells

und der Sprungfunktion im Bildbereich

erhält man durch inverse Laplace-Transformation die Sprungantwortfunktion des Modells
- .

Der Anstieg der Sprungantwortfunktion des Modells zum Zeitpunkt t ist

- .

Der Wendezeitpunkt errechnet sich aus der Bedingung

- .

Mit diesen Daten ist

die Gleichung der Wendetangente des Modells. Weiterhin gilt für den Durchtrittspunkt der Wendetangente durch die Zeitachse

und durch den stationären Wert
- .

Aus der Skizze ist zu erkennen, dass , und gilt. Damit lautet die Beziehung zwischen den Parametern des Systems , und den Eigenschaften des Modells und




- .

Diese Beziehungen sind als Tabellen und Nomogramme für konkrete Modelle verfügbar.
Modell-Übertragungsfunktionen
Mit dem beschriebenen Verfahren können nur Funktionen mit zwei Zeitkonstanten oder bei n gleichen Zeitkonstanten die Anzahl n und die Zeitkonstante bestimmt werden. Als Übertragungsfunktionen werden unter anderem eingesetzt:
- Zwei unterschiedliche Zeitkonstanten und



- gleiche Zeitkonstanten


- Zwei gleiche Zeitkonstanten und eine Zeitkonstante

- Bei großen Totzeiten oder Zeitverzögerungen geht auch

Beispiel
Für den Fall gleiche Zeitkonstanten


lautet die Sprungantwortfunktion

Der Anstieg der Wendetangente ist

und aus

folgt mit
nach umindizieren der Summen

und

die Wendezeit
- .

Der Anstieg im Wendepunkt ist

und

Die Wendetangentenkonstruktion liefert mit die numerisch auszuwertenden Beziehungen


und mit
- .

Das Scilab-Script
N=10;
printf("\n");
printf(" n |Tg/T |Tu/T |Tg/Tu\n");
printf("----------------------------\n");
for n=2:N,
su=0;
for i=0:n-1,su=su+(n-1)^i/factorial(i);end;
fa=factorial(n-1)*exp(n-1)/(n-1)^(n-1);
fu=n-1-factorial(n-1)*(exp(n-1)-su)/(n-1)^(n-1);
printf(" %-5d |%-5.3f |%-5.3f |%-5.3f\n",n,fa,fu,fa/fu);
end;
printf("----------------------------\n");
erzeugt eine Tabelle der Werte nach den oben angegebenen Beziehungen.
n |Tg/T |Tu/T |Tg/Tu ---------------------------- 2 |2.718 |0.282 |9.649 3 |3.695 |0.805 |4.587 4 |4.463 |1.425 |3.131 5 |5.119 |2.100 |2.437 6 |5.699 |2.811 |2.027 7 |6.226 |3.549 |1.754 8 |6.711 |4.307 |1.558 9 |7.164 |5.081 |1.410 10 |7.590 |5.869 |1.293 ----------------------------
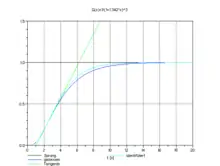
Aus der gemessenen Sprungantwort wurden die Werte , und mit einem Scilab-Script numerisch ermittelt. Aus der Tabelle folgt , und . Weil die aus und berechneten Zeitkonstanten unterschiedlich sind, wurde die mittlere Zeitkonstante zu berechnet. Damit gilt für die Übertragungsfunktion des Modells







- .

Anwendungen
Ein wesentliches Hilfsmittel der Systemidentifikation ist die lineare Regressionsanalyse. Man setzt hierbei als funktionale Abhängigkeit eine Linearkombination willkürlich gewählter Ansatzfunktionen an. Jede Ansatzfunktion ist arithmetischer Ausdruck der verursachenden physikalischen Größen. Die verursachte physikalische Größe wird errechnet, indem man jede Ansatzfunktion mit einem zunächst unbekannten Koeffizienten multipliziert und zum Ergebnis addiert. Die Koeffizienten werden dergestalt bestimmt, dass die mittlere quadratische Abweichung des gemessenen vom berechneten Ergebnis minimal wird. Dies bedeutet: die partielle Ableitung der mittleren quadratischen Abweichung nach jedem einzelnen Koeffizienten muss null sein. Daraus ergibt sich ein lineares inhomogenes Gleichungssystem zur Bestimmung der Koeffizienten. Die Matrix des Gleichungssystems besteht aus Produkten aus je zwei Ansatzfunktionen, gemittelt über alle Messungen. Die rechte Seite des Gleichungssystems besteht aus Produkten der verursachten Größe mit je einer Ansatzfunktion, gemittelt über alle Messungen. Bei der schrittweise durchgeführten linearen Regressionsanalyse wird iterativ bestimmt, welche Reihenglieder den meisten und welche den geringsten Einfluss auf die Genauigkeit haben, und die Reihenglieder ohne nennenswerten Einfluss werden weggelassen.
Anstelle der schrittweise erfolgenden linearen Regressionsanalyse kann bei vielen Problemstellungen alternativ ein mehrlagiges Perzeptron (engl. multi-layer perceptron, MLP) verwendet werden, was häufig mit dem Oberbegriff Neuronale Netze bezeichnet wird.
Die Systemidentifikation kommt beispielsweise in der Strömungsmechanik zum Einsatz, sei es um Widerstand und Auftrieb eines Profils zu berechnen oder sei es, um manövrierende Schiffe numerisch zu simulieren. Ein anderes Anwendungsgebiet ist die Schwingungstechnik, wo mit Übertragungsfunktionen (engl.: RAO = response amplification operator) berechnet wird, mit welcher Vergrößerung und Phasenverschiebung ein schwingfähiges System auf die einzelnen Frequenzen der Schwingungsursache reagiert.
In der Luftfahrt wird die Systemidentifizierung beispielsweise eingesetzt, um die aerodynamischen Parameter zu ermitteln, die aus analytischen Verfahren und Windkanalversuchen häufig nur ungenau bekannt sind. Hier ist die "Quad-M"- Systematik gebräuchlich, welche als die wesentlichen Teilaufgaben der Systemidentifizierung die Manöver (d. h. die Systemanregung), die Messung der Systemreaktion, das mathematische Modell des Systems sowie die Methoden zur Parameterschätzung angibt.
Literatur
- Heinz Unbehauen: Regelungstechnik I. Vieweg, 1997, ISBN 3-528-83332-7.
- Holger Lutz, Wolfgang Wendt: Taschenbuch der Regelungstechnik mit MATLAB und Simulink. 12. Auflage. Europa-Lehrmittel, 2021, ISBN 978-3-8085-5870-6.
- Lennart Ljung: System Identification: theory for the User. 2. Auflage. Prentice Hall, Upper Saddle River 2006, ISBN 978-0-13-656695-3.
- Oliver Nelles: Nonlinear System Identification. 1. Auflage. Springer, 2000, ISBN 978-3-540-67369-9.
- Rolf Isermann, Marco Münchhof: Identification of Dynamic Systems – An Introduction with Applications. 1. Auflage. Springer, 2010, ISBN 978-3-540-78878-2.