Spaltpolmotor
Der Spaltpolmotor ist ein Elektromotor und gehört zu den Asynchronmotoren. Im Unterschied zum drehstromgespeisten Asynchronmotor läuft der Spaltpolmotor jedoch mit einphasigem Wechselstrom.[1] Der Motor ist mechanisch sehr einfach aufgebaut.[2]

Aufbau

Beim Spaltpolmotor besteht der Stator aus einem Dynamoblechpaket mit lamellierten, ausgeprägten Polen, die in einen Hauptpol und einen Spaltpol aufgeteilt sind.[3] Die Statorwicklungen sind konzentrisch angeordnet.[1] Die Netzwicklung, der sogenannte Hauptstrang, liegt um das Statorjoch bzw. um die Polschäfte. Der Spaltpol besteht aus einer kleineren Nut, welche vom Hauptpol abgespalten ist.[4] Um den Spaltpol liegt eine Kurzschlusswicklung, die meist nur 1–3 Windungen hat. Diese Kurzschlusswicklung, auch Kurzschlussring genannt, bildet zusammen mit der Netzwicklung im Betrieb einen kurzgeschlossenen Transformator.[5] Damit eine günstige Feldverteilung erreicht wird, lässt man die Polschuhspitzen zusammenlaufen oder sogar überlappen. Um den gleichen Effekt zu erreichen, werden bei einigen Motoren die Polschuhe mit sogenannten Streublechen verbunden.[6]
Der Spaltpolmotor hat einen Rotor, der als Käfigläufer aufgebaut ist und gewöhnlich aus verschränkt angeordneten Rundstäben besteht. Im Rotor wird durch ein vom Stator erzeugtes ungleiches Drehfeld ein Drehmoment erzeugt.[7] Die Eigenschaften des Spaltpolmotors werden ganz wesentlich durch die Ausbildung der Streubleche, Streustege und Streuspalte beeinflusst. [8]
Synchronbetrieb
Wird der Rotor von Spaltpolmotoren aus einem magnetisch harten Werkstoff hergestellt, so laufen diese Motoren als Asynchronmotor an und werden nach dem Hochlaufen in den Synchronismus hineingezogen. Anschließend laufen sie als Synchronmotor weiter.[6] Diese Läufer werden auch Hystereseläufer genannt.[3] Ein ähnliches Betriebsverhalten weist auch der Reluktanzmotor auf.[6]
Ebenfalls als Einphasen-Synchronmotoren arbeiten langsamlaufende Spaltpolmotoren. Bei diesen induziert das Ständerdrehfeld Wirbelströme im Läuferring, welche den asynchronen Anlauf bewirken. Nach dem Hochlaufen bilden sich durch das Ständerdrehfeld im Magnetwerkstoff des Läufers ausgeprägte Pole. Bedingt dadurch nimmt der Rotor die Drehzahl des Ständerdrehfeldes an.[3]
Langsamlaufender Spaltpolmotor
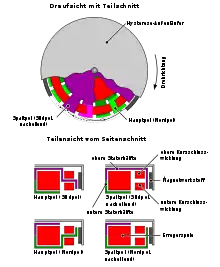
Langsamlaufende Spaltpolmotoren werden meist als Außenläufer gebaut. Damit sie eine entsprechend niedrige Drehzahl haben, werden sie mit 10 oder 16 Polen versehen. Der Stator besteht bei diesen Motoren aus einer ringförmigen Erregerspule und zwei aus Stahlblech bestehenden Ständerhälften. Diese Ständerhälften tragen am Umfang als Klauenpole wirkende Blechlappen. Die Polung der Klauenpole wird vom Magnetfeld der Erregerspule bestimmt. Aus diesem Grund ist die Polung der Klauenpole einer Ständerhälfte gleich.
Durch diesen Aufbau wirkt jede zweite Polklaue als Spaltpol. Um die Spaltpole einer Ständerhälfte ist ein gemeinsamer Kurzschlussring gebaut. Dieser Kurzschlussring bewirkt die Phasenverschiebung der magnetischen Flüsse in den Spaltpolen gegenüber den Hauptpolen.
Über die Klauenpole ist der Läufer in Topfform gestülpt. Auf der Läuferinnenseite befindet sich ein aus hartmagnetischem Werkstoff hergestellter Ring, der sogenannte Läuferring. Aufgrund des hartmagnetischen Werkstoffes des Läuferringes zeigt der langsamlaufende Spaltpolmotor das typische Drehzahlverhalten von Spaltpolmotoren mit Rotoren aus hartmagnetischem Werkstoff.[9]
Mit der sogenannten Kreuzpolschaltung wird bei Spaltpolmotoren eine Drehzahländerung realisiert.[8]
Funktion
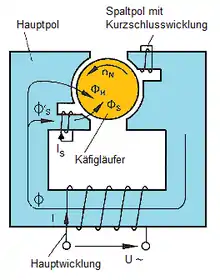
Ein Stromfluss in der Statorwicklung erzeugt im Stator einen magnetischen Fluss Φ.[6] Dieser teilt sich auf in das Hauptpolfeld ΦH und in das Spaltpolfeld ΦS, welcher durch die am Stator aufgebrachte Kurzschlusswicklung geht.[1] Das Spaltpolfeld induziert in der Kurzschlusswicklung eine Spannung, wodurch darin der Kurzschlussstrom Is entsteht.[6] Dieser baut durch Selbstinduktion den Fluss Φ’S auf, welcher dem Hauptfeld ΦH nacheilt. Zusammen erzeugen beide Flüsse im Rotor ein ungleiches, sogenanntes elliptisches Drehfeld, das den Rotor mitnimmt. Dieses elliptische Drehfeld ist ein qualitativ schlechtes Drehfeld.[7]
Die Magnetpole des durch die beiden phasenverschobenen Ströme hervorgerufenen magnetischen Feldes wandern nacheinander zu folgenden Statorpolen: Hauptpol 1 zu Spaltpol 1, Hauptpol 2 zu Spaltpol 2. Somit ist die Drehrichtung immer vom Hauptpol zum Spaltpol.[10] Um das Drehfeld runder zu gestalten, sind die Spaltpole zuweilen ihrerseits noch einmal geteilt, wobei mit einer zweiten Kurzschlusswindung eine zusätzliche Phasenverschiebung erzeugt wird. Der Phasenwinkel der magnetischen Flüsse lässt sich durch eine genaue Wahl der Streustege vergrößern.[8] Ein auf diese Weise erzeugtes Drehfeld reicht aus, um den Läufer zu bewegen. Allerdings ist es auch stark belastungsabhängig und führt zu einem geringeren Anlaufdrehmoment als bei Drehstrommotoren mit gleicher Leistung.[7]
Das Anlaufdrehmoment ist abhängig von der Spaltpolbreite und der Streustegbreite und steigt mit der Breite der beiden Faktoren.[11] Das Anlaufmoment beträgt etwa 50 % des Nennmomentes. Durch die spezielle Statorform entstehen beim Spaltpolmotor große Streufelder mit entsprechenden Streufeldverlusten.[7] Die Leistungsdichte ist bei Spaltpolmotoren konstruktionsbedingt sehr viel kleiner als bei Kondensatormotoren.[11] Auch der Wirkungsgrad des Spaltpolmotors ist deutlich geringer als bei einem gleich starken Drehstrom-Asynchronmotor oder einem Kondensatormotor.[8] Das ist auf die ohmschen Verluste in den Kurzschlusswindungen zurückzuführen.[7] Diesen Nachteil kann man dadurch vermeiden, dass man die Kurzschlusswicklung nach dem Anlaufen abschaltet. Der Motor läuft dann ohne Drehfeld mit gutem Wirkungsgrad. Das Zu- und Wegschalten des Hilfswicklungs-Kurzschlusses erfolgt per Hand (z. B. bei älteren Rasenmähern) oder automatisch anhand der Stromaufnahme mit einem Magnetschalter, der in Serie zur Hauptwicklung liegt, so umgesetzt in Kühlschrank-Kompressoren.
Drehrichtungsumkehr

Die Drehrichtung von Spaltpolmotoren kann normalerweise elektrisch nicht geändert werden, da sie durch die Polanordnung bedingt ist und nur der Hauptstrang von außen zugänglich ist.[12] Es sind jedoch verschiedene Umbauten am Motor möglich, durch die die Drehrichtung beim Spaltpolmotor verändert werden kann.[5] So besteht die Möglichkeit, dass die Drehrichtung durch eine spezielle Schaltungsanordnung umschaltbar gemacht wird. Dafür wird der Motor so konstruiert, dass auf beiden Polseiten eine Hilfswicklung angebaut wird.[13] Es wird somit eine zweite Kurzschlusswicklung angebaut.[5] Es gibt auch Motoren mit vier Spaltpolen, deren Wicklungen jeweils paarweise kurzgeschlossen werden können.[14] Die jeweilige Wicklung wird über einen speziellen Schalter je nach erforderlicher Drehrichtung kurzgeschlossen. Die verwendeten Schalter müssen für hohe Ströme ausgelegt sein und sind auch sehr aufwändig.[13] Eine Möglichkeit für reversierbare Antriebe ist der paarweise Zusammenbau von zwei baugleichen Spaltpolmotoren.[15] Diese beiden Motoren werden spiegelverkehrt zusammengebaut.[13] Allerdings handelt es sich hierbei um relativ aufwändige Spezialkonstruktionen, die dem Zweck der Einfachheit des Spaltpolmotors widersprechen und daher in der Praxis praktisch nicht anzutreffen sind.
Um die Drehrichtung bei einem einfachen Spaltpolmotor zu ändern, müsste der Motor zerlegt und der Stator um 180° axial gedreht eingebaut werden. Das ist sehr umständlich und aufgrund der Konstruktion (Stator nicht symmetrisch, Lagerschilde mit Niet- anstatt mit Schraubverbindung, Probleme beim Zusammenbau wegen Fertigungstoleranzen) nicht immer möglich.[5]
Vor- und Nachteile
Vorteile
- sehr einfach im Aufbau
- kostengünstig
- hohe Laufruhe
- wartungsfrei
- hohe Lebensdauer
- robust
- selbsttätiger Anlauf
Nachteile
- geringer Wirkungsgrad
- schlechter Leistungsfaktor
- nur für kleine Leistungen verwendbar (ca. 2⁄3 der Leistung eines normalen Drehstrommotors)
- geringe Leistungsdichte
- in der „Normalausführung“ keine Drehrichtungsumkehr[6]
Einsatzbereiche
Aufgrund ihres sehr einfachen Aufbaus werden Spaltpolmotoren in Großserien gefertigt.[8] Sie werden als preiswerte Antriebsmaschinen mit geringen Leistungen bis etwa 300 Watt immer dann eingesetzt, wenn kein hohes Anlaufmoment erforderlich ist.[6] Spaltpol-Synchronmotoren werden für Leistungen bis zu 3 Watt gebaut.[3] Die genannten Vor- und Nachteile des Spaltpolmotors gegenüber anderen Asynchronmotoren bestimmen seine Einsatzgebiete: Sein geringer Wirkungsgrad (ca. 30 %) verhindert den Einsatz im Bereich großer Leistungen. Sein Hauptvorteil, die Möglichkeit, ihn ohne zusätzlichen Kondensator an Wechselspannung betreiben zu können, hat ihm u. a. im Haushaltsbereich eine gewisse Verbreitung erbracht.[16] Der Motor eignet sich besonders für Antriebe mit Kurzzeitbetrieb.[1] Seine für Asynchronmotoren typische Laufruhe, Wartungsfreiheit und hohe Lebensdauer haben ihn zum Standardantrieb für kleine axiale und radiale Lüfter und Ventilatoren werden lassen.[17]
Einsatzbeispiele für Spaltpol-Asynchronmotoren
Einsatzbeispiele für Spaltpol-Synchronmotoren
- Antriebsmotor für Programmschaltwerke
- elektrische Uhren
- elektrische Zeitrelais
- schreibende Messgeräte[3]
- im Mikrowellenherd zur Kühlung des Magnetrons
Weblinks
Einzelnachweise
- Georg Flegel, Karl Birnstiel, Wolfgang Nerreter: Elektrotechnik für Maschinenbau und Mechatronik. Carl Hanser Verlag, München 2009, ISBN 978-3-446-41906-3.
- Ralf Kories, Heinz Schmidt-Walter: Taschenbuch der Elektrotechnik. 8. erweiterte Auflage, Verlag Harry Deutsch, Frankfurt am Main 2008, ISBN 978-3-8171-1830-4.
- Günter Springer: Fachkunde Elektrotechnik. 18. Auflage, Verlag Europa-Lehrmittel, Wuppertal, 1989, ISBN 3-8085-3018-9.
- Ekbert Hering, Alois Vogt, Klaus Bressler: Handbuch der Elektrischen Anlagen und Maschinen. Springer-Verlag, Berlin Heidelberg New York 1999, ISBN 3-540-65184-5.
- A. Senner: Fachkunde Elektrotechnik. 4. Auflage. Verlag Europa-Lehrmittel, 1965, S. 210–211.
- Günter Boy, Horst Flachmann, Otto Mai: Die Meisterprüfung Elektrische Maschinen und Steuerungstechnik. 4. Auflage, Vogel Buchverlag, Würzburg, 1983, ISBN 3-8023-0725-9.
- Franz Moeller, Paul Vaske (Hrsg.): Elektrische Maschinen und Umformer. Teil 1 Aufbau, Wirkungsweise und Betriebsverhalten, 11. überarbeitete Auflage, B. G. Teubner, Stuttgart 1970.
- Rolf Fischer: Elektrische Maschinen. 12. Auflage, Carl Hanser Verlag, München und Wien, 2004, ISBN 3-446-22693-1.
- Klaus Tkotz, Peter Bastian, Horst Bumiller: Fachkunde Elektrotechnik. 27. überarbeitete und erweiterte Auflage, Verlag Europa-Lehrmittel Nourney Vollmer GmbH & Co. KG, Haan Gruiten 2009, ISBN 978-3-8085-3188-4.
- Ernst Hörnemann, Heinrich Hübscher: Elektrotechnik Fachbildung Industrieelektronik. 1. Auflage. Westermann Schulbuchverlag GmbH, Braunschweig, 1998, ISBN 3-14-221730-4.
- Detlev Roseburg: Elektrische Maschinen und Antriebe. Fachbuchverlag Leipzig im Carl Hanser Verlag, 1999, ISBN 3-446-21004-0.
- Germar Müller, Bernd Ponick: Grundlagen elektrischer Maschinen. 9. Auflage, Wiley-VCH Verlag GmbH & Co KGaA., Weinheim 2006, ISBN 3-527-40524-0.
- Hans-Dieter Stölting, Achim Beisse: Elektrische Kleinmaschinen. B.G. Teubner Verlag, Stuttgart 1987, ISBN 978-3-519-06321-6, S. 76–83.
- R. Gottkehaskamp: Spaltpolmotoren, abgerufen am 2. April 2012 (PDF; 184 kB).
- Hartmut Janocha: Aktoren. Grundlagen und Anwendungen, Springer Verlag, Berlin / Heidelberg 1992, ISBN 978-3-662-00418-0, S. 102–104.
- Bergmann, Schaefer: Lehrbuch der Experimentalphysik, Band 2. Elektromagnetismus. 8. völlig neubearbeitete Auflage, Walter de Gruyter GmbH & Co. KG. Berlin New York 1999, ISBN 3-11-016097-8.
- Manfred Rudolph, Ulrich Wagner: Energieanwendungstechnik. Wege und Techniken zur effizienteren Energienutzung, Springer Verlag, Berlin / Heidelberg 2008, ISBN 978-3-540-79021-1, S. 229.
- Heinz M. Hiersig (Hrsg.): VDI-Lexikon Energietechnik. Springer-Verlag Berlin-Heidelberg GmbH, Berlin 1994, ISBN 3-642-95749-8.