REEM
REEM-A und REEM-B sind zwei humanoide Roboter, die von Pal Technology 2006 beziehungsweise 2008 entwickelt wurden.

Technische Daten
| Name | REEM-A | REEM-B |
| Fertigstellung | 2006 | 2008 |
| Höhe | 140 cm | 147 cm |
| Masse | 40 kg | 60 kg |
| Betriebsdauer | 90 min | 120 min |
| Geschwindigkeit | 1,5 km/h | 1,5 km/h |
| Freiheitsgrade (DOFs) | 30 | 41 |
| Nutzlast | 2 kg | 12 kg |
| Hauptprozessor | Intel Pentium M (1,6 GHz) | Intel Core 2 Duo (1,66 GHz) Geode (500 MHz) |
REEM-A
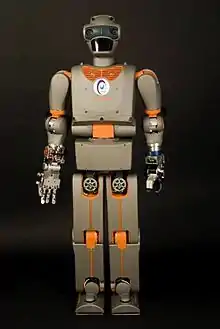
REEM-A ist der erste von Pal Technology entwickelte humanoide Roboter. Er kann sich wie die meisten humanoiden Roboter dynamisch bipedal bewegen, beherrscht unter anderem das Schachspielen. Seine Umwelt nimmt er mittels eines Mikrofons, einer Stereokamera, sechs Achsen-Kraft-Sensoren, eines Beschleunigungssensors und eines Kreiselinstruments wahr. Er erkennt Objekte und Gesichter wieder und kann mittels Sprache mit Menschen kommunizieren.
REEM-B
REEM-B ist der zweite Prototyp, er kann sich wie REEM-A dynamisch bipedal bewegen und beherrscht ebenfalls unter anderem das Schachspielen. Er nimmt seine Umwelt, wie REEM-A mittels eines Mikrofons, einer Stereokamera, sechs Achsen-Kraft-Sensoren, eines Beschleunigungssensors und eines Kreiselinstruments wahr, zusätzlich verfügt er allerdings noch über einen Ultraschall-Sensor und einen Laserscanner. Dies ermöglicht es ihm Treppen zu bewältigen und sich in jedem Gebäude der Welt zurechtzufinden, da er von seiner Umgebung sogar eine Art Lageplan erstellt. Wie auch schon sein Vorgänger kann er schwere Lasten tragen, er bewältigt bis zu 12 kg.
Ziel des Projektes
Die Roboter wurden auch dazu entwickelt, um älteren oder hilfsbedürftigen Menschen zu helfen und sie zu unterhalten.
Weblinks
- Offizielle Webpräsenz der REEM-Roboter (engl.)
- Artikel über REEM A in einer Zeitschrift von Springer