Newmark-beta-Verfahren
Newmark-beta-Verfahren sind Methoden zur impliziten numerischen Integration von Differentialgleichungen. Die Verfahren gehören zu den Einschrittverfahren, da zur Berechnung der Werte zur Zeit nur die Werte des vorangegangenen Zeitschritts zur Zeit benötigt werden. Dabei werden zwei Parameter und eingeführt, mit denen die Stabilität und die Genauigkeit des Verfahrens gesteuert werden. Die Verfahrensklasse ist in der numerischen Analyse der Dynamik von Festkörpern wie in der Finite-Elemente-Methode weit verbreitet. Benannt ist sie nach Nathan M. Newmark, der sie 1959 für die Anwendung in der Strukturdynamik entwickelte.[1]




Herleitung
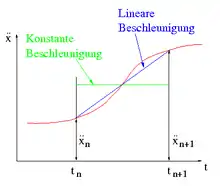
Im Zeitintervall , in dem eine Lösung einer Differentialgleichung zweiter Ordnung in der Zeit gesucht wird, sei eine streng monoton steigende Folge von Zeitpunkten vorgegeben, zu denen die Lösung berechnet werden soll. Der Wert der Variable , ihre Rate und Beschleunigung seien zur Zeit bekannt. Die Beschleunigung wird im Intervall linear interpoliert, siehe Bild:







(I)

worin eine Näherungslösung der gesuchten Funktion bezeichnet. Integration über die Zeit liefert mit :



(II)

(III)

Mit
- und


sind diese Formeln für lineare Systeme exakt und liefern das lineare Beschleunigungsverfahren. Die von Newmark ursprünglich angegebenen Werte
- und

entsprechen dem #Konstante Durchschnittsbeschleunigungsverfahren mit
- .

Unter der Voraussetzung, dass die Extremwerte der Beschleunigung im Intervall an den Grenzen des Intervalls auftreten, stellen die Integrale in Gleichungen (II) und (III) eine abgebrochene Taylorreihe mit Restglied dar, wobei mit und andere Approximationen gefunden werden. So können auch andere Werte für die Konstanten und motiviert werden.



Start der Berechnung
Der Newmark-Algorithmus startet zur Zeit mit . Zumeist wird angenommen, dass für die Beschleunigungen verschwinden. Mit dieser Annahme ist der Algorithmus unter Vorgabe der Anfangswerte und Anfangsgeschwindigkeit selbststartend, d. h. die Anfangsbeschleunigungen brauchen nicht in einem ersten Schritt berechnet zu werden.





Aktualisierung der Variablen
Mit dem Newmark-Algorithmus werden aus gegebenen Werten und zur Zeit die entsprechenden Werte zur Zeit berechnet. Die im Intervall liegenden Werte können mit den Gleichungen (I) bis (III) interpoliert werden. Mit und bekommt man aus Gleichungen (II) und (III):



(IV) ,

(V) .

Die beiden Gleichungen (IV) und (V) enthalten drei Unbekannte und . Die dritte zum Abschluss benötigte Gleichung liefert die zu lösende Differentialgleichung.


Bei kann auch als primäre Unbekannte gewählt werden:



- .

Sind einmal die Werte und berechnet, wird der Zähler inkrementiert und die Berechnung fortgesetzt, bis das Ende des interessierenden Zeitintervalls erreicht ist.

Spezialfälle
Konstante Durchschnittsbeschleunigungsverfahren
Die ursprüngliche Form des Newmark-Verfahrens entspricht einer konstanten mittleren Beschleunigung

mit der man in den obigen Formeln (IV) und (V)
- und
bekommt.
| Gleichung | Folgerung |
|---|---|


Zentrale Differenzenquotienten
Die zentralen Differenzenquotienten
(VI)

(VII)

entsprechen den obigen Formeln (IV) und (V) mit
- und .

| Gleichung | Folgerung |
|---|---|


Explizite Zeitintegration
Das explizite Zeitintegrationsverfahren gehört nicht zur Familie der (impliziten!) Newmark-beta Algorithmen und wird hier nur zu Vergleichszwecken angegeben. Die obigen Formeln (VI) und (VII) für die zentralen Differenzen sind äquivalent zu

- .

Hier fällt auf, dass die Geschwindigkeiten immer in der Mitte der Zeitintervalle berechnet werden. Mit der Annahme

können die Werte und die Geschwindigkeiten zum Zeitpunkt auf bereits bekannte Ergebnisse zurückgeführt werden und die Differentialgleichung liefert die Bestimmungsgleichung für die nunmehr einzige Unbekannte .


Beispiel
Eine Schwingung gehorche in Abwesenheit einer Erregung der homogenen Differentialgleichung
- .

Mit den Anfangsbedingungen


hat die Differentialgleichung die analytische Lösung

zu der die Anfangsbeschleunigung

gehört. Die Differentialgleichung liefert die Gleichung für die primäre Unbekannte :

Die Zeitintegration mit dem Newmark-Verfahren ergibt die Gleichungen für die Werte und Raten aus der Tabelle
| Parameter | Aktualisierungsvorschrift |
|---|---|
| explizit |







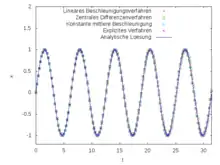
Die Lösungen im Intervall und haben den Verlauf im Bild. Die mittlere Abweichung



gibt die Tabelle:
| Verfahren | Mittlere Abweichung |
|---|---|
| Lineares Beschleunigungsverfahren | 0.021778594324355638 |
| Zentrales Differenzenverfahren | 0.022202937295615111 |
| Konstante mittlere Beschleunigung | 0.043283257071468406 |
| Explizites Verfahren | 0.022202937295615576 |

Literatur
- Robert Gasch, Klaus Knothe, Robert Liebich: Strukturdynamik, Springer Verlag 2012, ISBN 978-3-540-88977-9
- T. Belytschko, T.J.R. Hughes (Hrsg.): Computational methods for transient analysis. North-Holland 1986. ISBN 9780444864796
Einzelnachweise
- Newmark, Nathan M.: A method of computation for structural dynamics. In: Journal of Engineering Mechanics. 85 (EM3). ASCE, 1959, S. 67–94.