Metrische absolute Geometrie
Die metrische absolute Geometrie ist eine axiomatische Beschreibung der absoluten Geometrie, die ein gemeinsames Fundament für Modelle der euklidischen Geometrie und der nichteuklidischen Geometrie, konkret für elliptische Geometrien und hyperbolische Geometrien legt. Der Begriff und die Axiome stammen[1] von Friedrich Bachmann, der sie in seinem Lehrbuch „Aufbau der Geometrie aus dem Spiegelungsbegriff“ formuliert, wichtige Folgerungen beweist und zeigt, wie die zweidimensionalen, metrischen absoluten Geometrien, die metrischen Ebenen in projektive Ebenen eingebettet werden können.[2] Jede metrische Ebene bestimmt durch ihre „Metrik“ eine bestimmte Untergruppe der Projektivitätengruppe des zweidimensionalen projektiven Raumes , in den sie sich einbetten lässt, auch der Körper ist durch die metrische Ebene eindeutig bestimmt.


Es ist zu beachten, dass der Begriff „Metrik“ wie er in diesem Zusammenhang benutzt wird, nur entfernte, formale Ähnlichkeiten mit der Metrik eines metrischen Raumes hat. Die „Metrik“ bestimmt hier eine Orthogonalität zwischen Geraden, im Allgemeinen keinen Abstand zwischen Punkten. Man kann diese Orthogonalität in dem Koordinatenvektorraum, des projektiven Raumes , in den die metrische Ebene eingebettet wird, durch eine symmetrische Bilinearform beschreiben (zu dieser Beschreibung siehe Projektiv-metrische Geometrie). Diese Rechtwinkeldefinition entspricht dann formal der für den reellen, euklidischen Fall gewohnten Definition durch ein Skalarprodukt, also durch eine positiv-definite symmetrische Bilinearform.

Dieser Artikel beschreibt hauptsächlich die ebene metrische absolute Geometrie, ihre Modelle heißen metrische Ebenen.
Axiome der ebenen metrischen Geometrie
Das geometrisch formulierte Axiomensystem ist äquivalent zu dem gruppentheoretisch formulierten.[3] In der metrischen Geometrie wird das gruppentheoretisch formulierte Axiomensystem zur Grundlage gemacht, aus diesem System wird geschlossen. Das geometrische Axiomensystem wird hier zum Abgleich mit anderen Axiomensystemen der absoluten Geometrie zitiert:
Geometrische Formulierung der Axiome
Gegeben sei , wobei die Elemente der Menge Punkte, die Elemente der Menge Geraden genannt werden. , die Inzidenzrelation sei eine zweistellige symmetrische Relation. Gilt , so sagt man „ inzidiert mit “ und verwendet dafür auch die sonst in der Geometrie üblichen Formulierungen. Kurz: ist eine (einfache) Inzidenzstruktur, wobei nicht gefordert wird, dass Punkt- und Geradenmenge disjunkt sind.[4] Die Relation , die Orthogonalität, kann nur zwischen Geraden bestehen, man sagt dann für : ist senkrecht zu , ist ein Lot von usw.











Jede bijektive Selbstabbildung der Punktmenge , bei der die Inzidenz und die Orthogonalität erhalten bleiben, heißt orthogonale Kollineation. Eine involutorische orthogonale Kollineation, die eine Gerade punktweise fest lässt, heißt eine Spiegelung an der Geraden .

- Inzidenzaxiome: Es gibt wenigstens eine Gerade und mit jeder Geraden inzidieren wenigstens drei Punkte. Zu zwei verschiedenen Punkten gibt es genau eine[5] Gerade, welche mit beiden Punkten inzidiert.
- Orthogonalitätsaxiome: Ist senkrecht zu , dann ist senkrecht zu (Symmetrie). Senkrechte Geraden haben einen Punkt gemein. Durch jeden Punkt gibt es zu jeder Geraden eine Senkrechte, und, falls der Punkt mit der Geraden inzidiert, nur eine.
- An jeder Geraden gibt es wenigstens eine Spiegelung (Spiegelungsaxiom). Die Komposition von Spiegelungen an drei Geraden , welche einen Punkt oder ein Lot gemeinsam haben, stimmt mit einer Spiegelung an einer Geraden überein (Satz von den drei Spiegelungen).




Gruppentheoretische Begriffe und Vereinbarungen
Die Verknüpfung einer Gruppe wird multiplikativ oder häufiger durch Juxtaposition geschrieben, ist ihr neutrales Element. Die Konjugation operiert wie das Potenzieren von rechts und ist dementsprechend definiert:


- , damit ist
- Eine Teilmenge einer Gruppe heißt invariant, wenn sie dies unter der Konjugation ist. Eine Teilmenge ist also genau dann invariant, wenn für jedes Element und jedes Gruppenelement stets gilt.
- In einer Gruppe heißen die Elemente der Ordnung involutorisch, damit ist insbesondere das neutrale Element der Gruppe keine Involution!







Grundrelation
Für involutorische Gruppenelemente wird eine namenlose Relation definiert, es zeigt sich, dass diese Relation sowohl Inzidenz als auch Senkrechtstehen und noch einige andere Beziehungen beschreibt: Seien involutorische Gruppenelemente, dann gilt genau dann, wenn eine der folgenden äquivalenten Bedingungen erfüllt ist:


- ist involutorisch,
- und ,
- und (geometrische Interpretation: Die Bewegung bildet das „geometrische Objekt“ z. B. Punkt oder Gerade auf sich selbst ab),
- und .







Die Grundrelation ist symmetrisch und irreflexiv.
- Abkürzungen
Statt „ und “ wird abkürzend geschrieben bedeutet: Jedes linksstehende Element steht mit jedem rechtsstehenden in Relation usw.






Gruppentheoretische Formulierung der Axiome


Grundannahme: Es sei ein aus involutorischen Elementen bestehendes, invariantes Erzeugendensystem einer Gruppe gegeben.

Die Elemente von werden mit kleinen lateinischen Buchstaben bezeichnet (sie spielen die Rolle der Geraden und Achsenspiegelungen), die involutorischen Elemente der Gruppe , welche als Produkt von zwei Elementen des Erzeugendensystems darstellbar sind – also die in der Form mit darstellbaren Elemente der Gruppe – werden mit großen lateinischen Buchstaben bezeichnet (sie spielen die Rolle der Punkte und Punktspiegelungen).


- Axiom 1: Zu gibt es stets ein mit (Existenz der Verbindungsgeraden).
- Axiom 2: Aus folgt oder (Eindeutigkeit der Verbindungsgeraden, zwei Geraden haben höchstens einen Schnittpunkt).
- Axiom 3: Gilt , so gibt es ein , so dass ist (Satz von den drei Spiegelungen für drei kopunktale Geraden).
- Axiom 4: Gilt , so gibt es ein , so dass ist (Satz von den drei Spiegelungen für drei lotgleiche Geraden).
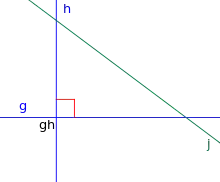
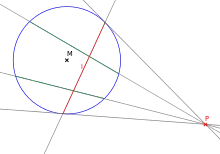
- Axiom D: Es gibt derart, dass und weder noch noch gilt (Axiom vom Dreiseit).













Vergleiche zur geometrischen Bedeutung der Axiome die Abbildung rechts für das Axiom D, zu den Axiomen 3 und 4 siehe weiter unten
Punkte, Geraden, Inzidenz- und Senkrechtrelation
- Die Elemente des Erzeugendensystems werden als Geraden interpretiert.
- Die involutorischen Elemente , für die eine Darstellung existiert, werden als Punkte interpretiert.
- Ist für einen Punkt und eine Gerade das Produkt (oder gleichwertig ) involutorisch, dann sagt man: „ und inzidieren“, kurz:.
- Ist für zwei Geraden das Produkt involutorisch, dann sagt man „ ist senkrecht zu “, kurz .







Zwei senkrechte Geraden bestimmen also einen Punkt, senkrechte Geraden schneiden sich immer, ein Punkt kommutiert mit jeder Geraden, die mit ihm inzidiert. Zwei Geraden kommutieren genau dann, wenn sie zueinander senkrecht stehen.
heißt, wenn die Grundannahme und die Axiome erfüllt sind, erzeugte Bewegungsgruppe. Die geometrische Struktur , die sich aus der Bewegungsgruppe durch die geometrischen Interpretationen ergibt, heißt die Gruppenebene von .

Transformieren
Ist ein beliebiges Gruppenelement, dann gilt nach Definition der Punkte und Geraden, insbesondere aufgrund der Invarianz von unter Konjugation:

- für jeden Punkt ist das transformierte Objekt ein Punkt,
- für jede Gerade ist das transformierte Objekt eine Gerade,
- die Inzidenzrelation und die Senkrechtrelation bleiben bei Transformationen erhalten.


Durch das „Transformieren“, also das gruppentheoretische Konjugieren, operiert die Gruppe auf sich selbst und insbesondere auf den Elementen, die geometrisch als Geraden und Punkte interpretiert werden. Als Transformationsgruppe der Punkte und Geraden wird als Gruppe der Bewegungen der Gruppenebene aus Punkten und Geraden bezeichnet.
Zunächst ist nach Konstruktion klar, dass durch die Transformation ein Epimorphismus der Gruppe auf die Gruppe ihrer inneren Automorphismen gegeben ist. Tatsächlich gilt:
Verbindbarkeit
Besteht für drei involutorische Elemente die Relation , dann heißt eine Verbindung von . Wichtige konkrete geometrische Interpretationen der Verbindbarkeit:




- : Die Punkte sind durch die Gerade verbunden. – Die Existenz dieser Verbindungsgeraden ist durch das Axiom 1, ihre Eindeutigkeit im Fall durch Axiom 2 gesichert.
- : Die beiden Geraden sind kopunktal. Existiert für zwei verschiedene Geraden ein Verbindungspunkt, dann gibt es nach Axiom 2 keinen weiteren.
- : Die Geraden besitzen ein gemeinsames Lot . Sie heißen dann auch lotgleich. Die geometrische Aussage: „Jede Gerade besitzt ein Lot“ folgt aus der Tatsache, dass jede Gerade einen Punkt enthält (aus den gruppentheoretischen Axiomen nicht ganz trivial zu beweisen) und dann einfach aus der Definition eines Punktes als Produkt zweier senkrechter Geraden.







Die Lotgleichheit zweier Geraden ist in der absoluten Geometrie eine Äquivalenzrelation, die die Parallelität im Sinne der Inzidenz oft ersetzen kann.
Büschel
Von Geraden sagt man „sie liegen im Büschel“, wenn also eine Gerade ist. Die dreistellige Relation Im-Büschel-Liegen hat offensichtlich die folgenden Eigenschaften:



- (dreistellige) Reflexivität: Stimmen mindestens zwei der Garaden überein, dann gilt . Zum Beispiel , da Involution ist, ist eine Gerade, weil invariant ist.
- (dreistellige) Symmetrie: Gilt , so trifft die Relation auch für jede Permutation der Geraden zu. Zum Beispiel ; usw.




Nicht so offensichtlich ist die:
- (dreistellige) Transitivität: Gilt und , dann folgt .[8]



Die Büschelrelation erzeugt als dreistellige „Äquivalenzrelation“ eine Aufteilung der Geradenmenge in Geradenbüschel mit folgenden Eigenschaften, die den Äquivalenzklasseneigenschaften einer zweistelligen Äquivalenzrelation ähneln (und rein mengentheoretische Folgerungen aus den genannten Relationeneigenschaften, der dreistelligen Reflexivität, Symmetrie und Transitivität sind):
- Für drei verschiedene Geraden in einem Büschel gilt die Relation.
- Gilt die Relation für zwei verschiedene Geraden eines Büschels und eine dritte Gerade, dann liegt auch diese im Büschel.
- Zwei verschiedene Geraden eines Büschels bestimmen dieses eindeutig.
- Zwei verschiedene Büschel haben höchstens ein Element gemein.
Geometrisch treten in der absoluten Geometrie drei Arten von Geradenbüscheln auf:
- Büschel kopunktaler Geraden (die klassischen Büschel, wie sie im projektiven Raum auftreten),
- Büschel lotgleicher Geraden, Lotbüschel,
- „freie“ Büschel (weder Punkt- noch Lotbüschel).
Für die ersten zwei Arten gilt ein „Alles oder Nichts“-Prinzip: Ist ein Punktbüschel zugleich Lotbüschel, dann sind es alle! Dies ist genau dann der Fall, wenn die Geometrie elliptisch ist, in diesem Fall existieren auch keine freien Büschel. In jeder nichtelliptischen Geometrie schließen sich die drei Fälle aus. Alle drei Arten werden bei der Einbettung der absoluten Geometrie in eine projektive Idealebene zu Idealpunkten. Genau diese Idealpunkte sind dann die Punkte der Idealebene.
Spiegelbildliche Lage, Winkel, Drehungen
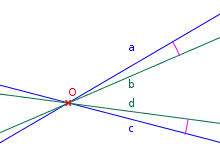



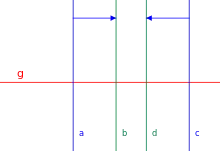
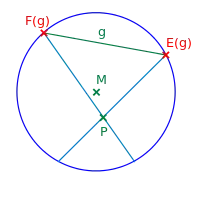
Gilt für 4 Geraden , dann sagt man nach Hjelmslev:[9] „Die Geraden liegen zueinander spiegelbildlich in Bezug auf die Geraden .“ Dann liegen auch die Geraden spiegelbildlich zueinander in Bezug auf , vergleiche die Abbildungen. Ist dabei , also und gleichwertig , dann sagt man: „Die Geraden liegen spiegelbildlich zueinander in Bezug auf die Achse “. Aus den Axiomen folgt nicht, dass es zu zwei gegebenen verschiedenen Geraden eine solche Mittellinie gibt.






Für Paare von Geraden in einem Punktbüschel ist durch die symmetrische Lage eine Äquivalenzrelation gegeben: . Zwei Paare, die zueinander in der -Relation stehen, bestimmen die gleiche „Drehung“ um den Punkt, mit dem sie gemeinsam inzidieren. Daher kann man die Äquivalenzklassen als Winkel auffassen. Der in der Abbildung rechts (kopunktale Geraden) eingezeichnete (euklidische) Winkel zwischen zwei Achsen ist der halbe euklidische Drehwinkel der Drehung um , die durch das Transformieren mit gegeben ist. In der zweiten Abbildung (lotgleiche Geraden) ist die eingezeichnete (euklidische) Verschiebung die Hälfte der Translation, die durch das Transformieren mit (links) bzw. (rechts) im metrisch-euklidischen Fall gegeben ist.




Unterscheidende Axiome





An den folgenden Axiomen gabeln sich die verschiedenen Arten von absoluten Geometrien:
- Verbindbarkeitsaxiom, es spielt die Rolle eines Vollständigkeitsaxioms.
- Existenz eines Polardreiseits (charakterisiert die elliptische Geometrie)
- Existenz eines Rechtsseits (charakterisiert im Wesentlichen die euklidische Geometrie, zusammen mit dem Verbindbarkeitsaxiom genau diese).
- Axiom schränkt die Möglichkeiten der Unverbindbarkeit ein. Es charakterisiert zusammen mit der Negation des Verbindbarkeitsaxioms die hyperbolische Geometrie.

Polardreiseit und elliptische Ebenen
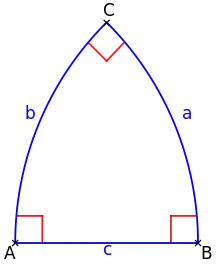

Geometrisch ist ein Polardreiseit ein Dreiseit (drei Geraden, die nicht kopunktal sind), bei dem jede Gerade auf beiden anderen senkrecht steht. In der Sprache der Gruppenebene sind das drei verschiedene , bei denen je zwei verschiedene zueinander in der Relation stehen, das heißt bei den unterschiedlichen äquivalenten Aussagen und Interpretationen:

- Jedes Produkt von zwei dieser Elemente
- ist eine Involution, d. h. ein Punkt,
- ist dem umgekehrten Produkt gleich.
- Aus der zweiten Aussage folgt, dass die drei Elemente kommutieren.
Nennt man z. B. das Produkt Punkt , dann sind involutorisch, also liegt auf und , ist also der eindeutig bestimmte Schnittpunkt dieser senkrechten Geraden. Analog sind , die anderen beiden Ecken des Dreiseits. Da die drei Geraden kommutieren, ist . kann aber nicht involutorisch sein, sonst wäre auch in der Geraden enthalten, was der Eindeutigkeit des Lotes in einem Punkt der Geraden widerspräche. Also gilt und das Entsprechende für jede Permutation der drei Geraden im Produkt.







Gilt umgekehrt für drei Geraden, so müssen sie paarweise verschieden sein (sonst wäre das Produkt entweder eine Gerade oder eine transformierte Gerade also wieder eine Gerade und jedenfalls eine Involution). Es folgt und wieder hat man drei verschiedene paarweise senkrechte Geraden, die zugleich als Produkte von Geraden Punkte sind.

- Axiom (Es existiert kein Polardreiseit) Es ist stets .
- Axiom (Es existiert ein Polardreiseit) Es gibt mit .



Aus dem Axiom folgt mit den gemeinsamen Axiomen: Kein Produkt einer ungeraden Anzahl von Erzeugenden ist einem Produkt einer geraden Anzahl von Erzeugenden gleich. In diesem Fall ist die Untergruppe der durch eine gerade Anzahl von Erzeugenden darstellbaren Gruppenelemente eine Untergruppe vom Index 2 in . Dann gilt:

- Es ist ,
- Jeder Punkt gehört zu der Untergruppe ,
- jedes Element der (echten) Nebenklasse von , der Klasse der durch eine ungerade Zahl von erzeugenden Achsenspiegelungen darstellbaren Gruppenelemente, ist in der Form , als Gleitspiegelung darstellbar,
- kein Produkt von zwei Punkten ist involutorisch,
- kein Punkt ist einer Geraden gleich,
- die involutorischen Elemente von sind genau die Punkte,
- die involutorischen Elemente der Nebenklasse sind genau die Geraden.



Aus dem Axiom folgt mit den gemeinsamen Axiomen: Jedes Produkt einer geraden Anzahl von Erzeugenden ist einem Produkt einer ungeraden Anzahl von Erzeugenden gleich, es ist , und außerdem gilt:

- Jedes Gruppenelement ist in der Form darstellbar,
- also ist jede Gerade einem Punkt gleich, man nennt ihn den Pol der Geraden, die Gerade Polare ihres Pols[10]
- bedeutet zugleich , also gehört jeder Punkt als Ecke zu einem Polardreieck, jede Gerade als Seite zu einem Polardreiseit.

Rechtseit und metrisch-euklidische Ebenen
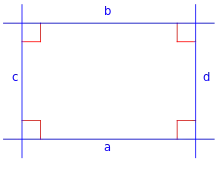
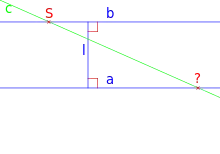
- Axiom : Es gibt mit und , das heißt, es gibt ein Rechtseit, vgl. die Abbildung rechts.
- Axiom : Aus folgt oder .





Geometrien, für die gilt, werden metrisch-euklidisch genannt. In einer metrisch-euklidischen Ebene wird die Lotgleichheit als Parallelität definiert: soll gelten, wenn die beiden Geraden ein gemeinsames Lot haben. Lotgleiche Geraden haben keinen oder alle Punkte gemein, sind also Nichtschneidende oder identisch. Zwei Geraden, die einander nicht schneiden, müssen aber nicht unbedingt ein gemeinsames Lot besitzen (siehe bei den Modellen). Das Verbindbarkeitsaxiom schließt die Existenz solcher Nichtschneidender, die nicht lotgleich sind, aus.


Aus dem Axiom folgt das Axiom , gleichwertig: Aus dem Axiom folgt das Axiom (immer auf der Grundlage der gemeinsamen Axiome). Ein Polardreiseit kann nicht zugleich mit einem Rechtsseit existieren. Etwas formeller: Keine metrisch-euklidische Geometrie ist elliptisch, keine elliptische metrisch-euklidisch.
Aus dem Axiom folgt der Rechtsseitsatz:[11] Aus und folgt . Vergleiche die Abbildung.




Trotz einer gewissen Ähnlichkeit zu Axiom ist der Rechtseitsatz ein Schließungssatz mit Orthogonalität – aus drei Senkrechtrelationen in einem Vierseit folgt die Vierte – während das Axiom eine reine Existenzaussage ist.
Verbindbarkeitsaxiom und Axiom H: Hyperbolische Ebenen
Hier wird „Verbindbarkeit“ in einem etwas engeren Sinn als weiter oben verstanden. Die Axiome können auch äquivalent allgemeiner formuliert werden, aber sie sollten hier als Axiome formal wenig voraussetzen. Die hier gegebene Formulierung ist die von Bachmann zur Beschreibung der hyperbolischen Geometrie gegebene:[12]
- Axiom (Verbindbarkeitsaxiom) Zu zwei Geraden gibt es stets einen Punkt mit oder eine Gerade mit . Geometrisch formuliert: Zwei Geraden haben entweder einen Punkt oder ein Lot gemeinsam.


- Gibt es für zwei Geraden einen solchen Schnittpunkt oder ein gemeinsames Lot, dann nennt man sie verbindbar (im engeren Sinn).
- Axiom : Es gibt , die unverbindbar sind.
- Axiom : Gilt und sind und und jeweils unverbindbar, so gilt oder oder .






- Anders formuliert besagt Axiom : In einem Büschel kopunktaler Geraden gibt es höchstens zwei verschiedene, die mit einer gegebenen Geraden unverbindbar sind (weder einen Punkt noch ein Lot mit ihr gemeinsam haben).


Eine Geometrie, die und erfüllt, wird als hyperbolische Geometrie bezeichnet.
Man kann das um die Unvollvollständigkeitsaxiome und als Zusatzaxiome erweiterte Axiomensystem der hyperbolischen Geometrie äquivalent, aber ein wenig kürzer beschreiben, indem man mit dem gemeinsamen Axiom zusammenfasst zum Axiom

- : Es gibt , mit und unverbindbar (im oben beschriebenen engeren Sinn: haben weder einen Punkt noch ein Lot gemein).[12]

Man kann also die hyperbolischen Bewegungsgruppen auch gleichwertig durch das Axiomensystem beschreiben, das man erhält, wenn man zusätzlich das Axiom fordert und die Axiome und durch ersetzt.[12]
Weiterhin gilt:[12]
- Aus folgt das Axiom , („jede elliptische Geometrie ist vollständig“),
- aus und folgt die Ungültigkeit von („keine unvollständige metrisch-euklidische Ebene ist hyperbolisch“),
- Jede hyperbolische Geometrie ist wegen „unvollständig“.
Daher kann eine Gruppenebene nur höchstens einer der Klassen „elliptische“, „metrisch-euklidische“ oder „hyperbolische“ Geometrie angehören.
Halbelliptische Ebenen
Eine Gruppenebene, die die Axiome , und erfüllt, wird als halbelliptisch bezeichnet, sie lässt sich auch gleichwertig durch das Axiom
- „Zwei verschiedene Geraden haben entweder genau ein Lot oder genau einen Punkt gemeinsam, nie beides.“[13]
beschreiben. Bei der Einbettung in einen projektiv-metrischen Raum werden halbelliptische Gruppen zu elliptischen Gruppen vervollständigt; ihre Bewegungsgruppe erweist sich dabei als volle elliptische Gruppe , aber das axiomatisch beschriebene Erzeugendensystem , das heißt geometrisch die Geraden der Ebene bilden eine echte Teilmenge der projektiven Geradenmenge und hier gruppentheoretisch der Menge aller involutorischer Gruppenelemente .


Einbettung in die projektiv-metrische Idealebene
Abgesehen von der Äquivalenz des geometrisch formulierten Axiomensystems zu dem gruppentheoretisch formulierten, ist zunächst nicht klar, in welchem Sinn es sich bei den axiomatisch beschriebenen Gruppen mit Erzeugendensystem aus involutorischen Elementen um „geometrische Abbildungsgruppen“ handelt. Die Einbettung in eine projektiv-metrische Ebene (die Idealebene der Gruppenebene) macht dies deutlich und leistet dabei viererlei:[14]
- Für die Inzidenzrelation: Die Menge der Achsenspiegelungen wird injektiv auf eine Teilmenge der Idealgeradenmenge (die eigentlichen Idealgeraden) abgebildet und die Menge der Geradenbüschel bijektiv auf die Punktmenge der projektiven Idealebene. Dabei bleibt die Inzidenzrelation für eigentliche Punkte (Punktbüschel der Gruppenebene) und eigentliche Geraden erhalten.
- Für die Orthogonalität: Die Orthogonalität in der Gruppenebene wird zu einer Idealgerade-Idealpol Beziehung in der projektiven Idealebene fortgesetzt. Zwei Geraden der Gruppenebene (eigentliche Idealgeraden) sind senkrecht zueinander, wenn die eine im Idealpol (einem Büschel) der anderen enthalten ist. Die Fortsetzung auf beliebige Idealgeraden und deren Pole ist eindeutig.
- Für die Gruppenstruktur: Die axiomatisch beschriebene Bewegungsgruppe erweist sich als isomorph zu einer wohlbestimmten Untergruppe der orthogonalen Gruppe der projektiv-metrischen Ebene, in die eingebettet wird. Die orthogonale Gruppe ist dabei diejenige Untergruppe der projektiven Gruppe , die die Polarstruktur invariant lässt. Das Erzeugendensystem bestimmt diese Untergruppe eindeutig, aber das Erzeugendensystem ist durch im Allgemeinen nicht eindeutig bestimmt.
- Für die algebraische Darstellung durch Koordinaten: Die Bewegungsgruppe bestimmt einen eindeutigen Koordinatenkörper (den Koordinatenkörper der projektiv-metrischen Ebene) und im Fall einer hyperbolischen Bewegungsgruppe durch ihr Erzeugendensystem auch eine eindeutige Anordnung dieses Körpers. Zusätzliche Eigenschaften der Bewegungsgruppe (Halbierbarkeit von Rechten Winkeln, geometrische Anordnung, Freie Beweglichkeit, …) entsprechen häufig einer bestimmten Klasse von Körpern.

Dabei beobachtet man zusätzlich und nebenher, dass die Halbspiegelungen, mit denen potentielle Idealgeraden (technisch) auf eigentliche Idealgeraden „kontrahiert“ werden, injektive Abbildungen auf der Menge der eigentlichen Idealgeraden darstellen, die nur dann surjektiv sind, wenn die Geometrie entweder elliptisch oder euklidisch ist. Daraus folgt, dass nur in diesen beiden Hauptfällen die metrische Ebene endlich sein könnte. – Tatsächlich existieren nur für den euklidischen Fall endliche Modelle. Im elliptischen Fall existieren die erforderlichen projektiven, elliptischen Polaritäten nur über unendlichen Körpern, siehe dazu Korrelation (Projektive Geometrie)#Polaritäten über endlichen Räumen.
Beziehungen zwischen Gruppenebene und Idealebene
- Jedes Geradenbüschel der Gruppenebene von ist ein Idealpunkt. Die Punktbüschel der Gruppenebene sind die eigentlichen Idealpunkte. Dies zeigt, dass die Idealebene minimal hinsichtlich der Punktmenge ist.
- Jeder eigentliche Idealpunkt (also jedes Punktbüschel) inzidiert auch in der Idealebene ausschließlich mit eigentlichen Idealgeraden. „In einem beliebigen Punkt stimmen absolute Geometrie und projektive Geometrie überein.“ Man nennt die Gruppenebene wegen dieser Eigenschaft auch eine lokal vollständige Teilebene ihrer Idealebene.
- Jede Bewegung bestimmt in der Idealebene eine eindeutige Projektivität, die die Gesamtheit der eigentlichen Idealpunkte und -geraden inzidenztreu durch Transformieren je auf sich abbildet.
- Die Spiegelung in der Gruppenebene an einer Geraden , das heißt das Transformieren mit induziert in der Idealebene die[15] involutorische Perspektivität mit der eigentlichen Idealgeraden als Achse und deren Pol als Zentrum.[16]




- Jede Idealgerade ist bestimmt als Fixpunktmenge (von fixierten Idealpunkten) einer involutorischen, polaritätstreuen Perspektivität , mit einem Idealpunkt , dem sie nicht angehört, als Zentrum – der Punkt selbst ist der einzige Fixpunkt von , der nicht zu der Idealgeraden gehören soll. Im metrisch-euklidischen Sonderfall ist zusätzlich noch die „Ferngerade“ eine uneigentliche Idealgerade, an ihr kann nicht gespiegelt werden.[17] Sie ist die Menge der (idealen) Pole aller eigentlichen Idealgeraden, mit anderen Worten: Die Menge aller Lotbüschel.


Mehrdimensionale Verallgemeinerung
Die gruppentheoretisch formulierten Axiome für eine absolute Geometrie lassen sich auf Räume der Dimension verallgemeinern:[18] Grundannahme: Sei eine erzeugte Gruppe, invariantes Erzeugendensystem aus involutorischen Elementen. Die Grundrelation für involutorische Gruppenelemente wird wie im zweidimensionalen Fall definiert. Es wird vereinbart, dass Ausdrücke wie als Abkürzung für Konjunktionen stehen: Steht zwischen zwei Elementen mindestens ein -Symbol, dann soll zwischen ihnen die Relation bestehen. Im Beispiel ist etwa ausgesagt, über die Beziehung zwischen und dagegen nichts.






Jedes Element von wird interpretiert als Spiegelung an einer Hyperebene und mit einem Kleinbuchstaben bezeichnet. wird definiert als Menge der involutorischen Produkte mit und interpretiert als Menge der Punktspiegelungen. Die Punktspiegelungen werden mit Großbuchstaben bezeichnet. Gemeinsame Axiome:


- Axiom 1n*: Zu gibt es ein mit .
- Axiom 1n: Zu mit gibt es ein mit .
- Axiom 2n: Aus folgt oder .
- Axiom 3n: Aus und folgt .
- Axiom 4n: Aus folgt .
- Axiom Xn: Es gibt mit .
- Axiom Dn: Zu mit gibt es ein derart, dass und weder noch gilt.















Die geometrischen Interpretationen:
- Existenz einer Senkrechten, Axiom 1n*: Zu einem Punkt und Hyperebenen gibt es eine Hyperebene durch , die zu den vorgegebenen senkrecht ist.
- Existenz einer Verbindung, Axiom 1n: Zu zwei Punkten und paarweise senkrechten Hyperebenen, die mit beiden Punkten inzidieren, gibt es eine Hyperebene durch die Punkte, die zu den vorgegebenen Hyperebenen senkrecht ist.
- Eindeutigkeit der Verbindung, Axiom 2n: Sind die beiden Punkte aus Axiom 1n verschieden, dann gibt es nur eine solche Hyperebene.
- Existenz der vierten Spiegelungshyperebene, Axiom 3n: Sind ein Punkt und paarweise senkrechte Hyperebenen gegeben, von denen alle bis auf höchstens eine mit inzidieren und auch diese nicht polar zu ist, dann gibt es zu drei Hyperebenen durch , die zu den vorgegebenen senkrecht sind, eine vierte Spiegelung(shyperebene).
- Dimension, Axiom Xn: Es gibt paarweise senkrechte Hyperebenen. (Daraus folgt mit der Eindeutigkeit der Verbindung, dass der Raum genau -dimensional ist).
- Axiom Dn: Zu paarweise senkrechten Hyperebenen gibt es eine weitere, die zu von ihnen senkrecht, aber von der letzten vorgegebenen verschieden und zu ihr nicht senkrecht ist.




Elliptisches Axiom:
- Axiom (vom Polarsimplex): Es gibt mit .



Modelle der metrischen absoluten Geometrie
Metrisch-euklidische Modelle mit euklidischer Parallelität
- Alle endlichen Modelle der metrischen absoluten Geometrie erfüllen das Parallelenaxiom, sind also affine Räume. Endliche ebene Modelle, die die hier beschriebenen gemeinsamen Axiome 1 bis 4 und D erfüllen, sind genau die endlichen präeuklidischen Ebenen. Die Bewegungsgruppe einer solchen präeuklidischen Ebene ist die von den senkrechten Achsenspiegelungen erzeugte Gruppe.
- Jede präeuklidische Ebene liefert ein Modell einer metrischen Ebene. Diese erfüllt dann zusätzlich die Axiome .
- Die präeuklidischen Ebenen lassen sich zu -dimensionalen Affinen Räumen mit Orthogonalität erweitern . Diese liefern dann Modelle für metrisch-euklidische Räume mit euklidischer Parallelität.


Hyperbolische Ebenen
- Das Kleinsche Kreisscheiben-Modell der hyperbolischen Geometrie, siehe Hyperbolische Geometrie. Dies ist das bis auf Isomorphie einzige Modell einer reellen hyperbolischen Ebene.
- Allgemein lässt sich über jedem geordneten Körper ein gruppentheoretisches Modell für eine hyperbolische Ebene angeben: Die Bewegungsgruppe ist , also die volle Projektivitätengruppe einer projektiven Geraden über . Die Achsenspiegelungen sind alle involutorischen Projektivitäten aus mit negativer Determinante.


Für ist das gruppentheoretische Modell isomorph zum Kleinschen Kreisscheibenmodell. Da der Körper der reellen Zahlen nur eine Anordnung zulässt und jede hyperbolische Polarität äquivalent zur Standardbilinearform mit der Formmatrix ist, kann man zeigen, dass das Kreisscheibenmodell die bis auf Isomorphie einzige hyperbolische Ebene (im Sinne der in diesem Artikel formulierten Axiome) über den reellen Zahlen ist.


Am reellen Beispiel lässt sich veranschaulichen, wie das gruppentheoretische Modell zustande kommt: Die Bewegungsgruppe des kleinschen Modells, das heißt die Gruppe der Kollineationen der projektiven Ebene , die das Kreisinnere des Einheitskreises so auf sich abbilden, dass die hyperbolische Orthogonalität erhalten bleibt, besteht genau aus denjenigen Projektivitäten, die die Einheitskreislinie auf sich abbilden. Diese Untergruppe der ist für jeden nichtausgearteten Kegelschnitt isomorph zu (für formal reellen Körper ).

Elliptische Modelle
Die Sphärische Geometrie auf der Einheitskugel im reellen dreidimensionalen Raum, bei der einander auf gegenüberliegende Punkte („Antipoden“) miteinander identifiziert werden, wenn zusätzlich die entsprechende Orthogonalität von Großkreisen definiert wird. Siehe dazu auch Korrelation (Projektive Geometrie)#Eine elliptische Polarität. Dies ist das (bis auf Isomorphie einzige) Modell der ebenen, reellen elliptischen Geometrie.
Allgemein ist für jeden elliptischen projektiv-metrischen Raum die volle Bewegungsgruppe mit der Menge aller involutorischen Elemente dieser Gruppe als Erzeugendensystem ein Modell einer -dimensionalen elliptischen Geometrie.[19] Notwendig und hinreichend für die Erklärbarkeit einer elliptischen „Metrik“ im , mit der dieser zu einem elliptischen projektiv-metrischen Raum wird, ist die Existenz einer projektiven elliptischen Polarität auf diesem Raum.



Im Allgemeinen müssen zwei elliptische Ebenen über dem gleichen Körper nicht isomorph sein. Sie sind es dann (hinreichende Bedingung) wenn die elliptische Polarität der einen Ebene durch Wahl einer geeigneten Basis des Koordinatenvektorraums auf die Form gebracht werden kann, die sie auf der anderen Ebene hat.

Literatur
- Originalliteratur
- Arnold Schmidt: Die Dualität von Inzidenz und Senkrechtstehen in der absoluten Geometrie. In: Math. Ann. Band 118, 1943, S. 609–625.
- Johannes Hjelmslev: Neue Begründung der ebenen Geometrie. In: Math. Ann. Band 64, 1907, S. 449–474.
- Zur Mehrdimensionalen (n>2) Verallgemeinerung
- H. Kinder: Elliptische Geometrie endlicher Dimension. In: Arch. Math. Band 21, 1970, S. 515–527.
- Gerhard Hübner: Klassifikation n-dimensionaler absoluter Geometrien. In: Abhandlungen aus dem Mathematischen Seminar der Universität Hamburg. Band 33, 1969, S. 165–182.
- Lehrbuch (Hauptquelle)
- Friedrich Bachmann: Aufbau der Geometrie aus dem Spiegelungsbegriff. 2. ergänzte Auflage. Springer, Berlin / Heidelberg / New York 1973, ISBN 3-540-06136-3.
Einzelnachweise und Anmerkungen
- Die grundlegende Idee zu einer „Spiegelungsgeometrie“ stammt von Hjelmslev, z. B. Hjelmslev (1907), Bachman hat nach seinen Worten ein Axiomensystem von Schmidt (Schmidt, 1943) „reduziert“.
- Bachmann (1973)
- Bachmann (1973), S. 32.
- Formuliert man wie hier die Geometrie gruppentheoretisch, so ergibt sich, dass in der elliptischen Geometrie Punkte und Geraden als Gruppenelemente nicht zu unterscheiden sind. Trotzdem ist man bei vielen Formulierungen, in denen Senkrecht- oder Inzidenzrelationen vorkommen, formal auf der sicheren Seite, wenn man sich Punkt- und Geradenmenge „disjunkt gemacht“ denkt.
- Aus dieser Eindeutigkeitsaussage folgt die (viel schwächere) „Einfachheit“ der Ebene als Inzidenzstruktur: Eine Gerade ist vollständig durch die Menge der mit ihr inzidierenden Punkte bestimmt. Daher genügt es, die Morphismen, hier die orthogonalen Kollineationen, als Punktabbildungen zu definieren.
- Bachmann (1973), §3.7 Satz 18
- Bachmann (1973), §3.7 Satz 19
- Bachmann (1973), §4.4 Satz 6 (Transitivitätssatz)
- Hjelmslev (1907)
- Man beachte hier: Pol und Polare sind in der Gruppe identische Elemente, aber als geometrische Objekte nie inzident, denn bedeutet, dass keine Involution ist.
- Bachmann (1973), §6,8, Satz 13 (Rechtseitsatz)
- Bachmann (1973) §14.1 Die Axiome der hyperbolischen Bewegungsgruppen
- Bachmann (1973) §6.12 Begründung der absoluten Geometrie
- Tatsächlich muss man die Einbettungsabbildung aus mehreren Halbspiegelungen, die auf Geraden wirken und deren „gespiegelte Inverse“, die auf Punkte wirken, zusammensetzen und Polarität und Erzeugendensystem nachträglich aus den eigentlichen Objekten rekonstruieren. Die Grundidee geht auf Hjelmslev zurück. Bachmann (1973) §6.10 Begründung der metrischen Geometrie
- Da eigentliche Idealgeraden nie mit ihrem Pol inzidieren, existiert nur eine involutorische Perspektivität mit diesen Vorgaben.
- Bachmann (1973), §6.5 Satz 10
- Projektiv ist jede involutorische Perspektivität mit der Ferngerade als Achse und einem eigentlichen Punkt als Zentrum (eine eigentliche Punktspiegelung an ) eine solche Achsenspiegelung. Aber zur Ferngerade existiert kein Pol.
- Bachmann (1973), §20.9 -dimensionale absolute Geometrie.
- Kinder (1970)

