Ljapunow-Exponent
Der Ljapunow-Exponent eines dynamischen Systems (nach Alexander Michailowitsch Ljapunow) beschreibt die Geschwindigkeit, mit der sich zwei (nahe beieinanderliegende) Punkte im Phasenraum voneinander entfernen oder annähern (je nach Vorzeichen). Pro Dimension des Phasenraums gibt es einen Ljapunow-Exponenten, die zusammen das sogenannte Ljapunow-Spektrum bilden. Häufig betrachtet man allerdings nur den größten Ljapunow-Exponenten, da dieser in der Regel das gesamte Systemverhalten bestimmt.
Betrachtet man allgemeiner Trajektorieverläufe im Phasenraum, dann liefern die Exponenten ein Maß für die Rate an Separation von einer Ursprungstrajektorie . In Bezug auf eine zeitkontinuierliche Betrachtung eines dynamischen Systems lässt sich dieser Zusammenhang formal allgemein darstellen als: , wobei die Linearisierung der Trajektorie zum Zeitpunkt darstellt.




Definition
Im Eindimensionalen gilt für eine rekursiv definierte Abbildung , also ist durch n-fache Verkettung gegeben.



Im Eindimensionalen ist der Ljapunow-Exponent einer iterierten Abbildung wie folgt definiert:
- .

Mit Hilfe der Kettenregel der Differentialrechnung erhält man für den Differentialquotienten in dieser Definition folgendes:
- .

Damit lässt sich der Ljapunow-Exponent auch anders definieren:
- .[1]

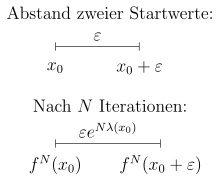
Die Herleitung des Exponenten folgt aus der gegebenen Abbildung. Nach Iterationen gilt . Man erhält die Definition, wenn man nach umformt und die Grenzwerte dieses Ausdrucks für und bildet.




Eigenschaften
- Ist der größte Ljapunow-Exponent positiv, so ist das System in der Regel divergent.
- Ist er negativ, so entspricht dies einer Phasenraumkontraktion, d. h., das System ist dissipativ und agiert stationär oder periodisch stabil.
- Ist er null, laufen ursprünglich dicht beieinander liegende Punkte im Phasenraum nicht mehr exponentiell wie im Fall des positiven größten Exponenten auseinander, sondern nur noch polynomiell.
- Ist die Summe der Ljapunow-Exponenten null, so handelt es sich um ein konservatives System. Außerdem gilt dann dabei die wichtige Besonderheit, dass eine inverse Betrachtung des jeweiligen Prozesses (inverse Zeitentwicklung oder inverse Abbildungsreihenfolge) ebenso zu einem inversen Spektrum der Exponenten führt, also eine gewisse Symmetrie auch in Bezug auf diese erhalten bleibt: , wobei die Gesamtanzahl an Ljapunow-Exponenten des Systems ist. Dies gilt unter der Voraussetzung, dass das entsprechende System auch wirklich reversibel ist.
- Das Spektrum der Exponenten kann degeneriert sein. In diesem Fall treten Exponenten mit einer jeweils individuellen Vielfachheit auf, von denen mindestens eine > 1 ist.
- Die Gesamtanzahl an Ljapunow-Exponenten, ohne Betrachtung ihrer jeweiligen Vielfachheit, eines Systems entspricht der Anzahl an Freiheitsgraden des betrachteten Systems.
- Die Exponenten sind stets Metrik-invariant.
- Für hinreichend große betrachtete Zeiten oder Iterationen gilt, dass die Exponenten unabhängig von der Wahl von bzw. sind. Dieser Aspekt spielt eine besondere Rolle für die Gültigkeit der Exponenten im Zusammenhang mit Simulationen.






Satz von Oseledets
Ein wichtiger Meilenstein in der Theorie der nichtlinearen dynamischen Systeme war der 1965 publizierte Satz von Valery Oseledets, der auch im selben Jahr noch von selbigem und ein Jahr später in einem anderen Zusammenhang von M. S. Raghunathan bewiesen worden ist. Der Satz, der eigentlich aus mehreren Sätzen besteht, macht unter anderem wichtige Existenzaussagen zu Ljapunow-Exponenten in Bezug auf eine große Klasse nichtlinearer dynamischer Systeme. Bis zur Veröffentlichung des Satzes war über diesen Bezug lediglich spekuliert worden und die Ermittlung der Exponenten nur für einfache (iterative) Abbildungen möglich.
In Bezug auf die Ljapunow-Exponenten spielt vor allem folgende Beziehung aus dem Satz von Oseledets eine große Rolle (differentialgeometrische Fassung):
Sei ein ergodisches dynamisches System gegeben, das auf einer Riemannschen Mannigfaltigkeit mit einer spezifizierten Metrik definiert ist. Sei weiterhin der Entwicklungsoperator des dynamischen Systems im entsprechenden Tangentialraum, der üblicherweise bei zeitdiskreter Betrachtung durch eine Fundamentalmatrix darstellbar ist.

Dann gilt in zeitkontinuierlicher Darstellung für fast jeden Nicht-Nullvektor , wobei hier die Dimension der Riemannschen Mannigfaltigkeit ist:

- .

Ljapunow-Vektoren und die Berechnung der Exponenten
Die ermittelbaren Skalare aus Oseledets Theorem entsprechen zwar per Definition Ljapunow-Exponenten, es ist jedoch nicht sofort ersichtlich, wie sich aus dieser Gesetzmäßigkeit das Spektrum der (charakteristischen) Ljapunow-Exponenten eines Systems ermitteln lässt, da die Wahl der zu evolvierenden Vektoren in Bezug eben auf dieses Gesetz und durch dieses nicht näher spezifiziert wird. Oseledet konnte in und mit weiteren Punkten seines Theorems zeigen, dass die Gesamtmenge an evolvierbaren Vektoren auf den Systementwicklungsprozess bezogen eine verschachtelte Unterraumstruktur aufspannt:
- ,

wobei die Ljapunow-Exponenten die Wachstums- bzw. Schrumpfraten (wieder je nach Vorzeichen) der Volumina dieser Unterräume repräsentieren. Wichtig im weiteren Verlauf ist, dass diese Unterräume eindeutig durch ein Orthogonalsystem beschreibbar sind.
Methode von Benettin et al.
Eine bewährte Methode, die Exponenten darauf aufbauend zu berechnen, wurde früh von Benettin et al. vorgeschlagen. Formuliert wurde ein Algorithmus, der bei zeitdiskreter Betrachtung die Exponenten mittels der Entwicklung sogenannter Gram-Schmidt-Vektoren auf statistische Art und Weise ermittelt: Bei zeitdiskreter Darstellung gilt für die Fundamentalmatrix:
- ,

wobei einen diskreten Zeitabstand repräsentiert, ein diskreter globaler Zeit- bzw. Iterationsschritt ist und die entsprechende Jacobi-Matrix darstellt. Entwickelt man diesbezüglich ein Orthogonalsystem an Vektoren, so muss, so die Prämisse von Benettin et al., dieses bei hinreichend großer Zeitentwicklung ausgehend von Oseledets Theorem direkt Information über die Ljapunow-Exponenten enthalten. Dem im Weg steht jedoch die problematische Tatsache, dass auf diese Weise entwickelte Orthogonalsysteme bei hinreichend großer Schrittweite in fast jedem Fall schnell ihre Orthogonalität verlieren. Dies hat nicht nur rein numerische Gründe bei der Berechnung mittels eines Computers, sondern auch Gründe in Bezug auf Oseledets Theorem an sich, da die Unterräume gegen ihre jeweiligen einbettenden Räume mit exponentieller Geschwindigkeit konvergieren. Das heißt, dass die Richtung der stärksten Unterraumvolumenänderung im Tangentialraum (bestimmt über den größten Ljapunow-Exponenten) dominierend wird. Um dies zu verhindern, muss die jeweilige Fundamentalmatrix nach einer festgelegten oder dynamisch ermittelbaren Schrittanzahl reorthogonalisiert werden. Die Namensgebung von Gram-Schmidt-Vektoren beruht genau darauf, dass man dafür ein modifiziertes oder iteratives Gram-Schmidt-Verfahren verwenden kann. Es gibt jedoch auch noch andere, numerisch stabilere Verfahren wie die explizite QR-Zerlegung oder die Givens-Rotation. Im Bereich des wissenschaftlichen Rechnens haben sich jedoch optimierte iterative Gram-Schmidt-Verfahren stark etabliert, da diese besonders gut parallelisierbar sind und hinreichend genau arbeiten.



Bei der Anwendung dieser Reorthogonalisierung auf erhält man die QR-Zerlegung , wobei die Matrix der reorthogonalisierten Gram-Schmidt-Vektoren und eine obere Dreiecksmatrix darstellt, die auf der Hauptdiagonalen die lokalen Wachstumsfaktoren der jeweiligen Unterräume enthält. Benettin et al. identifizieren nun mit die Menge an sogenannten finite time Lyapunov exponents in Bezug auf den betrachteten Zeitbereich bis zur Reorthogonalisierung zum Zeitschritt . Diese berechnet sich aus dem natürlichen Logarithmus dieser lokalen Wachstumsfaktoren.




Mit lässt sich nun die Brücke zu den „echten“ Ljapunow-Exponenten des Systems schlagen.

Zusammenfassend bedeutet dies konkret für den Algorithmus:
- Initialisiere das zu analysierende System mit den jeweiligen Startparametern.
- Erstelle eine passende Einheitsmatrix entsprechend der Anzahl an Freiheitsgraden im System. Diese bildet den Startzustand der Gram-Schmidt-Vektoren.
- Wähle eine fixe Rate an Zeitschritten, welche die Häufigkeit der Reorthogonalisierungen bestimmt oder wende ein adaptives Verfahren an. Zu häufige Orthogonalisierungen erhöhen die Berechnungsdauer (QR-Verfahren weisen alle, bis auf Spezialfallalgorithmen, kubische Laufzeiten auf). Zu große Zeitabstände andererseits verschlechtern diesbezüglich jedoch die numerische Genauigkeit.
- Wähle eine Samplingrate in Bezug auf die Erfassung der finite time Lyapunov exponents. Diese sollte stets ein ganzzahliges Vielfaches der Orthogonalisierungsrate sein.
- Iteriere das System nach den jeweiligen Zeitentwicklungsgleichungen, sowohl im Phasenraum, als auch im Tangentialraum (Fundamentalmatrix und Gram-Schmidt-Vektoren). Linearisiere dazu falls notwendig diese Gleichungen (in der Regel nicht lineare Differentialgleichungen höherer Ordnung). Reorthogonalisiere nach der festgelegten Zeitschrittanzahl und sample die finite time Lyapunov exponents.
- Ermittle nach Erreichen individueller Abbruchsbedingungen die eigentlichen Ljapunow-Exponenten mit Hilfe der finite time Lyapunov exponents. Ein üblicher und empfohlener Ansatz ist, mit der eigentlichen Berechnung der Exponenten erst zu beginnen, wenn die Phasenraumtrajektorie gegen den ergodischen Attraktor konvergiert und die Gram-Schmidt-Vektoren einen sogenannten statistisch stationären Zustand erreicht haben, über dessen mögliche Existenz Oseledets Theorem ebenfalls Aussagen trifft.
Es ist zu betonen, dass das Verfahren von Benettin et al. nur ein mögliches unter vielen ist und für spezielle Problemfälle und Systeme andere Verfahren geeigneter sein können. Des Weiteren muss je nach System und Randbedingungen spezifiziert werden, ab wann in der Zeitentwicklung wirklich mit der Berechnung der Exponenten begonnen werden soll und wie viele Gesamtzeitschritte notwendig sind, um statistisch hinreichend gute Daten zu erhalten.
Ljapunow-Vektoren
In Bezug auf diesen generellen Ansatz lassen sich mehrere Vektortypen klassifizieren, die im Allgemeinen, jedoch nicht überall konsistent, in der Fachwelt unter dem Begriff der Ljapunow-Vektoren subsumiert werden und einen mehr oder weniger starken Bezug zu den Exponenten aufweisen. Gemein ist all diesen Vektoren, dass sie Tangentialvektoren des jeweiligen Systems sind. Dies sind im Folgenden auszugsweise:
- Gram-Schmidt-Vektoren: Diese sind die zeitlokalen orthogonalen Tangentialvektoren, die beispielsweise im Benettin-Algorithmus vorkommen. Sie sind nicht kovariant zur Tangentialraumdynamik und weisen allgemein keine Symmetrien bei inverser Prozessbetrachtung bei reversiblen Systemen auf. Ob ihre (physikalische) Bedeutung über die eines methodischen Hilfsmittels hinaus geht, ist derzeit (Stand April 2016) nicht bekannt.
- Backward Lyapunov-Vektoren: Oseledets Theorem beweist die Existenz eines sogenannten stationären Zustandes der Gram-Schmidt-Vektoren bei hinreichender Zeitentwicklung, sobald der ergodische Attraktor per Phasenraumentwicklung erreicht worden ist. Die (Gram-Schmidt-)Vektoren, die diesen Zustand repräsentieren, sind der eigentliche Ausgangspunkt für die Berechnung der Exponenten nach Benettin et al. Es muss angemerkt werden, dass dieser stationäre Zustand nicht impliziert, dass die entsprechenden Gram-Schmidt-Vektoren nicht weiterhin fluktuieren können.
- Forward Lyapunov-Vektoren: Diese sind das Äquivalent der Backward-Lyapunov-Vektoren bei inverser Zeitentwicklungsrichtung des Systems und spielen eine Rolle bei der Berechnung der kovarianten Ljapunow-Vektoren.
- Kovariante Ljapunow-Vektoren: Die Existenz dieser Vektoren ist schon relativ lang bekannt, jedoch existierte bis 2007 kein Algorithmus, der imstande ist, diese zu berechnen. Da diese wesentlich mehr Informationen über die Stabilität dynamischer Systeme und generell über die Tangentialraumdynamik preisgeben können oder mit sich tragen als beispielsweise die schon umfangreich genutzten Gram-Schmidt-Vektoren, ist deren intensivere Erforschung und Nutzung derzeit mit Stand April 2016 im Bereich der dynamischen Systeme besonders stark zu beobachten. Der Zusammenhang zu den Ljapunow-Exponenten besteht hier derart, dass die Exponenten direkt das Wachstums- bzw. Schrumpfverhalten dieser Vektoren repräsentieren: , wobei wieder die Fundamentalmatrix und ein kovarianter Ljapunow-Vektor ist.


Bedeutung der Ljapunow-Exponenten
Kaplan-Yorke-Vermutung
Die Kaplan-Yorke-Vermutung liefert eine Abschätzung für die obere Grenze der Informationsdimension mit Hilfe des Ljapunow-Spektrums ab. Diese so genannte Kaplan-Yorke-Dimension ist wie folgt definiert:


- ,

wobei die größte natürliche Zahl ist, für die die Summe positiv bleibt.
Ljapunow-Zeit
Das Inverse des größten Ljapunow-Exponenten, die sogenannte Ljapunow-Zeit bzw. die mittlere Prädiktionszeit, ist die Zeit, für die sich sinnvolle Vorhersagen über das Systemverhalten machen lassen.
Literatur
- Heinz Georg Schuster: Deterministisches Chaos. Eine Einführung. 3. Auflage. VCH Verlagsgesellschaft, Weinheim 1994, ISBN 3-527-29089-3
- H. Kantz, T. Schreiber: Nonlinear Time Series Analysis. Cambridge University Press, Cambridge 2004, ISBN 0-521-52902-6
- B. Hasselblatt, A. Katok: Introduction to the modern theory of dynamical systems. Part of Encyclopedia of Mathematics and its Applications. Cambridge 1997, ISBN 978-0-521-57557-7
- David Ruelle: Ergodic theory on differentiable dynamical systems. In: IHES Publicationes Mathematiques, 50, 1979, S. 275–320
- Francesco Ginelli, Hugues Chaté, Roberto Livi, Antonio Politi: Covariant Lyapunov vectors. In: Journal of physics A: Mathematical and theoretical, Volume 46, Number 25, 04/2013
- G. Benettin, L. Galgani, J. M. Strelcyn: Kolmogorov entropy and numerical experiments. In: Phys. Rev. A, 14, 1976, S. 2338
- Govindan Rangarajan, Salman Habib, Robert Ryne: Lyapunov Exponents without Rescaling and Reorthogonalization. 1998, doi:10.1103/PhysRevLett.80.3747
- Günter Radons, Gudula Rünger, Michael Schwind, Hong-liu Yang: Parallel Algorithms for the Determination of Lyapunov Characteristics of Large Nonlinear Dynamical Systems. In: PARA, 2004, S. 1131–1140
- Harald A Posch: Symmetry properties of orthogonal and covariant Lyapunov vectors and their exponents. 2011, arxiv:1107.4032
- Harald A. Posch, R. Hirschl: Simulation of billiards and of hard body fluids in Hard ball systems and the Lorentz gas. Springer, Berlin 2000
Weblinks
- Amie Wilkinson: What are Lyapunov exponents and why are they interesting? In: Bulletin of the American Mathematical Society, 2017, arxiv:1608.02843
Einzelnachweise
- Heinz Georg Schuster: Deterministisches Chaos – Eine Einführung. 3. Auflage. VCH Verlagsgesellschaft, Weinheim 1994, ISBN 3-527-29089-3, S. 24 f.