Eigenlenkgradient
Mit Hilfe des Eigenlenkgradienten wird das stationäre Eigenlenkverhalten zweispuriger Kraftfahrzeuge quantitativ angegeben. Er bestimmt wesentlich die Fahrstabilität bei hohen Fahrgeschwindigkeiten.
Unter Eigenlenkverhalten versteht man die Eigenschaft von Fahrzeugen z. B. Störungen ohne Zutun des Fahrers zu reduzieren (Untersteuern) oder noch zu verstärken (Übersteuern). Bei normaler Kurvenfahrt beeinflusst es den Lenkradwinkelbedarf.[1]
Definition
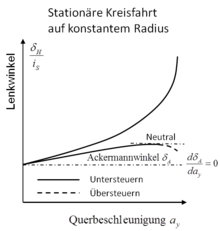
Basis für die Definition des Eigenlenkgradienten ist der Zusammenhang zwischen Lenkwinkel und Querbeschleunigung bei stationärer Kreisfahrt. Dieser Zusammenhang kann durch Fahrversuche mit entsprechender Messausrüstung oder Simulationen ermittelt werden.
Nach DIN 70000 bzw. ISO 8855 ist der Eigenlenkgradient definiert als Differenz der Gradienten von Lenkwinkel und Ackermannwinkel bezüglich der Querbeschleunigung :[2]




- der Lenkwinkel berechnet sich bei konstanter Gesamtlenkübersetzung iS als Quotient aus Lenkradwinkel (Index H für Hand) und Gesamtlenkübersetzung:


- der Ackermannwinkel ist der Winkel, der von den Polstrahlen vom Momentanpol zur Vorderachse und zur Hinterachse eingeschlossen wird. Näherungsweise ist:

mit


Daher kann man die Bestimmungsgleichung für den Eigenlenkgradienten auch schreiben als:

Entsprechend dem Vorzeichen des EG gilt:
- : Fahrzeug verhält sich untersteuernd
- : Fahrzeug verhält sich neutral
- : Fahrzeug verhält sich übersteuernd.



Der Eigenlenkgradient wird typischerweise für denjenigen Querbeschleunigungsbereich angegeben, in dem der Zusammenhang zwischen Lenkwinkel und Querbeschleunigung noch als linear bezeichnet werden kann. Dies ist bei Pkw auf trockener Fahrbahn etwa der Bereich zwischen 1 m/s2 und 4 m/s2.
Im linearen Bereich beschreibt der Eigenlenkgradient den von der Querbeschleunigung abhängigen Anteil des Lenkwinkels:

Alle heutigen PKW sind im linearen Bereich aus Gründen der Fahrsicherheit untersteuernd ausgelegt (siehe Einspurmodell), d. h. der Eigenlenkgradient ist hier immer positiv. Aussagen wie „das Fahrzeug verhält sich weitgehend neutral“, sind im Sinne der Definition nicht zutreffend.
Wird der Eigenlenkgradient als Funktion der Querbeschleunigung dargestellt, so sind auch Aussagen zum Eigenlenkverhalten im Grenzbereich möglich. Beispiele sind Fahrzeuge mit Heckmotor-Konzept, die im linearen Bereich untersteuernd, im Grenzbereich dagegen übersteuernd sein können.
Messverfahren
Zur Bestimmung des Eigenlenkgradienten können prinzipiell drei Verfahren angewandt werden:
- Kreisfahrt mit konstantem Radius

- Kreisfahrt mit konstanter Geschwindigkeit

- Kreisfahrt mit konstantem Lenkradwinkel
Am häufigsten wird die stationäre Kreisfahrt auf konstantem Radius eingesetzt. Hauptgrund dürfte der relativ geringe Platzbedarf auf Testgeländen sein. Näheres zum Testverfahren ist in ISO 4138 international festgelegt.
Einflussgrößen
Haupteinflussgrößen auf den Eigenlenkgradienten sind Achslastverteilung, wechselseitige Federraten, Momentanzentrumshöhen, Bereifung und Eigenlenkverhalten der Achsen. Hierunter sind die Spurwinkeländerungen auf Grund von Kräften und Momenten bzw. wechselseitiger Federung zu verstehen. Letztere Eigenschaft wird auch als Rollsteuern bezeichnet, da die Achse Lenkwinkel auf Grund eines Wankwinkels erzeugt.
Literatur
- Adam Zomotor: Fahrverhalten In: Jörnsen Reimpell (Hrsg.): Fahrwerktechnik. Vogel, Würzburg 1991, ISBN 3-8023-0774-7
Einzelnachweise
- Dieter Schramm, Benjamin Hesse, Niko Maas, Michael Unterreiner: Fahrzeugtechnik: Technische Grundlagen aktueller und zukünftiger Kraftfahrzeuge. DE GRUYTER OLDENBOURG, 2017, ISBN 978-3-486-71620-7, S. 87. (eingeschränkte Vorschau in der Google-Buchsuche)
- Karl-Ludwig Haken: Grundlagen der Kraftfahrzeugtechnik. 4. Auflage. Hanser, 2015, ISBN 978-3-446-44216-0, S. 252. (eingeschränkte Vorschau in der Google-Buchsuche)