Deepsea Challenger
Die Deepsea Challenger ist ein 7,3 m hohes Tiefsee-U-Boot, das gebaut wurde, um zum tiefsten Punkt der Meere zu tauchen. Am 26. März 2012 gelang James Cameron mit diesem Fahrzeug der zweite bemannte Tauchgang und gleichzeitig der erste Solo-Tauchgang zum Grund des Challengertiefs in einer Tiefe von 10.898 Metern.[1]
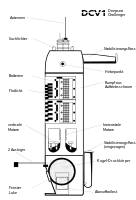 Zeichnung der DCV1, nach der Deepsea Challenger-Website (nicht maßstäblich) Zeichnung der DCV1, nach der Deepsea Challenger-Website (nicht maßstäblich) | ||||||||||||
| ||||||||||||
| ||||||||||||
| ||||||||||||
| ||||||||||||
| ||||||||||||
Geschichte
Die Deepsea Challenger wurde von 2005 bis 2012 im Geheimen in Australien entwickelt und gebaut. Federführend war dabei der australische Ingenieur Ron Allum.
Obwohl soweit möglich auf bestehende Technologien zurückgegriffen wurde, entwickelte man wichtige Komponenten völlig neu. So ist der syntaktische Auftriebsschaum deutlich zugfester als bis dahin verfügbare Auftriebsmaterialien, so dass der Auftriebskörper des Tauchbootes gleichzeitig die einzige tragende Struktur ist. Das Material besteht aus Glashohlkugeln und Aramidfasern in einer Epoxidharzmatrix, die unter hydraulischem Druck gehärtet wird.[2]
Auch die elektrischen Antriebsmotoren wurden speziell entwickelt. Es handelt sich um elektronisch kommutierte Gleichstrommotoren mit integrierter Steuerelektronik und Ölfüllung. Außerdem sind die LED-Arrays, Lithiumbatterien, Kameras und Druckkörperdurchführungen Spezialentwicklungen.
Alle Komponenten wurden vor dem Einbau einem Drucktest in der firmeneigenen 1400-Bar-Druckkammer unterzogen.[3] Lediglich der Passagier-Druckkörper musste an der Pennsylvania State University, die über eine der zu der Zeit weltweit lediglich zwei ausreichend großen Druckkammern verfügte, getestet werden.
Technische Beschreibung
Rumpf

Der Passagier-Druckkörper ist eine Kugel aus hochfestem Stahl mit einem inneren Durchmesser von 1090 mm und einer Wanddicke von 64 mm.[4] Die Druckfestigkeit wurde mit einem 3D-Scan der fertigen Kugel per FEM nachgerechnet, da die Abweichung von der exakten Kugelform die Stabilität wesentlich beeinflusst. Der Prüfdruck betrug 114 MPa. Die Kugel ist am unteren Ende des Auftriebskörpers mittels Spanngurten befestigt. Die Einstiegsluke hat ein konisches Fenster aus Acrylglas (PMMA), das während des Tauchgangs schräg nach unten zeigt. Es ist mit einer hochauflösenden Kamera bestückt, die das Bild auf einen Monitor im Blickfeld des Piloten überträgt.[5]
Der Auftriebskörper macht 70 % des Bootsvolumens aus und ist gleichzeitig die tragende Struktur. Er besteht aus einem speziellen Schaum mit einem spezifischen Gewicht von 700 kg/m³. Das Tiefsee-U-Boot steht beim Tauchen aufrecht. So wird der Strömungswiderstand beim Auf- und Abtauchen klein gehalten. Die erreichte Sink- und Steiggeschwindigkeit ist etwa 4 kn unter Verwendung des abwerfbaren Ballasts. Zwei klappbare Stabilisierungsflossen halten das Tauchboot dabei aufrecht und ruhig.
Der abwerfbare Ballast besteht aus Eisenplatten von 450 kg am unteren Rumpfteil. Der Ballastabwurf ist mehrfach redundant ausgeführt. Er kann vom Piloten ausgelöst werden, bei Stromausfall, nach circa 13 h durch Korrosion eines Halteseils oder durch einen thermischen Trennbolzen.[4]
Maschine
Die zwölf ölgefüllten, druckkompensierten Antriebsmotoren sind auf beiden Seiten des Auftriebskörpers jeweils dreimal horizontal und dreimal vertikal angebracht. Sie erlauben eine horizontale Geschwindigkeit von 3 kn und eine vertikale von 2,3 kn. Gesteuert werden sie über einen Joystick und eine Tiefen- und Kursautomatik.
Die Energieversorgung ist mit Lithium-Polymer-Batterien in ölgefüllten, druckkompensierten Gehäusen realisiert. Bis zu 70 Blöcke mit je 1 kWh Energiegehalt[2] sind in den Seiten des Rumpfes unter einer transparenten Abdeckung sichtbar untergebracht.[6]
Spezialausrüstung
Hauptausrüstung sind Kameras und Lampen. Neben der Red Epic 5k mit mehr als 4k Auflösung am Fenster gibt es ein Paar HD-Kameras für 3D-Aufnahmen an einem 6,6 m langen Ausleger und zwei HD-Kameras am Manipulator, eine davon mit Makro-Objektiv. Im Innenraum befindet sich ein weiteres Paar 3D-HD-Kameras, das den Piloten filmt. Die Front des Rumpfes trägt eine größere Zahl LED-Paneele. Weitere Lampen sind an einem zweiten Ausleger und oberhalb der Luke angebracht. In klarem Wasser kann damit ein Bereich bis zu 30 Meter Entfernung beleuchtet werden. Außerdem sind ein Manipulator mit Probennehmer und ein Probenbehälter im untersten Teil des Rumpfes eingebaut.
 Der oberste Teil trägt Lampen, Blitzlichter und GPS-Empfänger.
Der oberste Teil trägt Lampen, Blitzlichter und GPS-Empfänger. Batterie.
Batterie. Ein Antriebsmotor.
Ein Antriebsmotor. Der untere Teil enthält den Druckkörper. Hier ist ein Ballast-Abwurf-Mechanismus.
Der untere Teil enthält den Druckkörper. Hier ist ein Ballast-Abwurf-Mechanismus. Das 1:1 Modell des Druckkörpers.
Das 1:1 Modell des Druckkörpers. Luke und Fenster.
Luke und Fenster. Innenausstattung des 1:1 Modells.
Innenausstattung des 1:1 Modells.
Einsätze
Erste Testfahrten fanden im Januar 2012 in der Australia’s Sydney Naval Yard statt. Im Februar folgten Tests auf 1000 Meter. Im März führten die Tests auf 8221 Meter Tiefe im Neubritanniengraben.
Challengertief
Am 26. März 2012 startete die Deepsea Challenger vom ROV-Basisschiff Mermaid Saphire aus zu ihrem Rekordtauchgang zum Challengertief. Der Abstieg dauerte 2 h 37 min und die Zeit am Grund etwa 3 h. Die maximale Tauchtiefe wurde als 10.908 m gemessen.[7] Das sind einige Meter weniger, als die Trieste 1960 an gleicher Stelle erreichte. Es war der erste Solo-Tauchgang in diese Tiefe und die längste Zeit am Grund.
Verbleib

Im Juni 2013 wurde die Deepsea Challenger in einigen US-amerikanischen Städten der Öffentlichkeit präsentiert (California Science Center in Los Angeles, Perot Museum of Nature and Science in Dallas, Georgia Aquarium in Atlanta, Washington, D.C.). Am 14. Juni 2013 wurde sie durch James Cameron an das ozeanographische Institut in Woods Hole übergeben.[8] Damit die Wissenschaftler, Ingenieure und Techniker des Instituts den Aufbau und die technischen Lösungen im Detail studieren konnten, wurde das Tauchfahrzeug in Zusammenarbeit mit James Camerons Ingenieurteam in seine einzelnen Baugruppen zerlegt und wieder zusammengebaut.[9]
Im Juli 2015 sollte das Tauchboot vom Woods Hole Institut an das Australian National Maritime Museum in Sydney verliehen werden. Auf dem Weg von Woods Hole nach Baltimore wurde das Tauchboot am 23. Juli 2015 beschädigt, als während der Fahrt am Sattelauflieger ein Feuer ausbrach.[10] James Cameron erklärte, dass wichtige Baugruppen wie der Druckkörper für den Piloten, die Motoren, der Manipulator sowie andere komplexe und teure Baugruppen durch den Brand nicht beschädigt wurden.[11]
Im La Cité de la Mer in Cherbourg befindet sich ein Nachbau in Originalgröße.[12][13]
Weblinks
- www.deepseachallenge.com
- NGS video: Cameron's return from Challenger Deep
- ronallum.com
- Voices from the deep – Acoustic communication with a submarine at the bottom of the Mariana Trench – Bericht der Australian Acoustical Society mit Schwerpunkt Unterwasserkommunikation während der Tauchgänge (PDF; 555 kB), abgerufen am 14. Februar 2019
- The Ballad Of Ron Allum – How a self-taught engineer sent James Cameron to the Mariana Trench and back – Bericht des US-amerikanischen Journals Popular Sciences über die Entstehung des Tauchbootes, abgerufen am 13. März 2019
- Technology of the DEEPSEA CHALLENGE Expedition Part 2 of 3ːDEEPSEA CHALLENGER – Bericht des Journals Ocean News & Technology über den Aufbau des Tauchbootes, abgerufen am 16. November 2019
- Technology of the DEEPSEA CHALLENGE Expedition Part 3 of 3ːDEEPSEA CHALLENGER – Bericht des Journals Ocean News & Technology über den Aufbau des Tauchbootes, abgerufen am 9. Juli 2019
Einzelnachweise
- news.nationalgeographic.com
- Ron Allum: Isofloat. (Nicht mehr online verfügbar.) Archiviert vom Original am 8. Juni 2017; abgerufen am 10. Juni 2017. Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- Ron Allum: Designing Systems For The Deepest Point of Earth. Abgerufen am 13. Oktober 2014.
- Deepsea Challenger Pilot Sphere. Abgerufen am 13. Oktober 2014.
- Deepsea Challenge: Equipment. Abgerufen am 13. Oktober 2014.
- Deepsea Challenger Systems an Technologie. Abgerufen am 13. Oktober 2014.
- National Geographics explorer James Cameron’s expedition. Abgerufen am 14. Oktober 2014.
- WHOI Welcomes Explorer and Director James Cameron and the DEEPSEA CHALLENGER. Abgerufen am 29. Januar 2016.
- WHOI Welcomes Explorer and Director James Cameron and the DEEPSEA CHALLENGER. Abgerufen am 29. Januar 2016.
- Deepsea Challenger submersible catches fire on I-95. Abgerufen am 29. Januar 2016.
- Director James Cameron’s Deepsea Challenger Submarine Scorched in Truck Fire. Abgerufen am 29. Januar 2016.
- DEEPSEA CHALLENGER La Cité de la Mer. Abgerufen am 14. Oktober 2014.
- Cherbourg: la Cité de la Mer inaugure la réplique du sous-marin de James Cameron. 12. Februar 2014, abgerufen am 6. Mai 2021.