d/q-Transformation
Die d/q-Transformation, auch als dq-, dq0- und als Park-Transformation bezeichnet, dient dazu, dreiphasige Größen wie bei einer Drehstrommaschine mit den Achsen U,V,W in ein zweiachsiges Koordinatensystem mit den Achsen d und q zu überführen. Sie ist ein Teil der mathematischen Grundlagen zur Vektorregelung von Drehstrommaschinen und beschreibt eine von mehreren möglichen Raumzeigerdarstellungen. Im Gegensatz zur verwandten Clarke-Transformation rotiert das d/q-Koordinatensystem im stationären Fall mit dem Rotor und das Wertepaar d/q stellt dann zeitlich konstante Größen dar. Die Grundform der d/q-Transformation wurde erstmals 1929 von Robert H. Park formuliert.[1]
Allgemeines
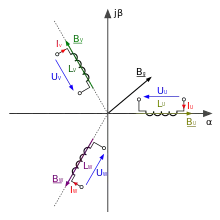
Ein Dreiphasensystem wird in der komplexen Ebene durch drei Koordinaten , und , die jeweils um einen Winkel von 120° versetzt sind, beschrieben. Sie entsprechen den drei Spulen des ruhenden Stators einer Drehfeldmaschine, wobei definitionsgemäß die Achse mit der reellen Achse zusammenfällt, wie in der ersten Abbildung des statorfesten αβ-Koordinatensystems der Clarke-Transformation dargestellt. Durch diese Spulen fließende Ströme , und sind bei einem symmetrischen Dreiphasensystem in Summe immer 0.






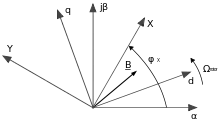
Bei der d/q-Transformation wird das Koordinatensystem mit den aufeinander rechtwinkelig stehenden Achsen d und q mit der Kreisfrequenz mit dem Rotor mitrotiert, wie in zweiter Abbildung dargestellt. Damit kann das Drehfeld bei konstanter Drehzahl in Form zweier zeitlich konstanter Größen d und q beschrieben werden. Der Wert d bildet die magnetische Flussdichte der magnetischen Erregung im Rotor ab, und q ist ein Ausdruck für das vom Rotor erzeugte Drehmoment. Zeitliche Änderungen wie der Drehzahl oder Momentschwankungen resultieren in zeitlichen Änderungen von d bzw. q. Der Vorteil der Transformation besteht darin, dass Drehfeldmaschinen ähnlich einfach wie Gleichstrommaschinen mit einem PI-Regler geregelt werden können.

Um das d/q-Koordinatensystem mit korrekter Winkelgeschwindigkeit und Phasenlage mit dem Rotor mitrotieren zu lassen, ist es notwendig die genaue Lage in Form des Winkel des Rotors zu kennen. Diese für die Transformation wesentliche Information kann mit zusätzlich an der Maschine angebrachten Sensoren wie Hall- oder optischen Sensoren, oder durch Rückkopplungen wie die Auswertung der elektromotorischen Kraft (EMK) an der Statorwicklung gewonnen werden.

Die Transformation ist nicht nur auf die elektrischen Ströme beschränkt, sondern kann für alle anderen elektrischen Größen wie die dabei auftretenden elektrischen Spannungen oder die magnetischen Flussdichte analog angewandt werden.
Gleichungen
Die amplitudeninvariante d/q-Transformation für symmetrische Dreiphasensysteme ist definiert als:[2]

Die inverse d/q-Transformation lautet:

Wird die d/q-Transformation über den „Umweg“ einer zuvor durchgeführten Clarke-Transformation und den daraus gewonnenen Parametern und durchgeführt, mitunter wird dieser Weg aus didaktischen Gründen in der Lehre gewählt, reduziert sich die d/q-Transformation auf eine Drehmatrix:



Erweiterung
Bei einem nicht im Gleichgewicht befindlichen Dreiphasensystem kann durch Hinzufügen eines dritten Parameters im Rahmen der Theorie der symmetrischen Komponenten die d/q-Transformation zu der dq0-Transformation erweitert werden. ist die Summe der drei Phasenströme:


mit der dann auch die sich nicht im Gleichgewicht befindlichen Dreiphasensysteme durch die amplitudeninvariante dq0-Transformation beschreiben lassen:

Die inverse dq0-Transformation lautet:

Die leistungsinvariante dq0-Transformation, und damit auch die vereinfachte dq-Transformation, beinhaltet den Vorfaktor anstatt . Die Inversen zur Rücktransformation müssen im leistungsinvarianten Fall jeweils mit dem Faktor multipliziert werden.


Literatur
- Padmaraja Yedamale: Feldorientierte Steuerung ohne Sensor - Leiser und effizienter per BLDC-Motor. In: elektronik industrie. Nr. 12, 2008, S. 38 bis 41.
Einzelnachweise
- R. H. Park: Two Reaction Theory of Synchronous Machines generalized Method of Analysis-Part I. In: AIEE Transactions. Vol. 48, 1929, S. 716 bis 727, doi:10.1109/T-AIEE.1929.5055275.
- A. Binder: Elektrische Maschinen und Antriebe. Springer-Verlag, 2012, ISBN 978-3-540-71849-9, S. 1016 f.