Braitenberg-Vehikel
Als Braitenberg-Vehikel bezeichnet man ursprünglich hypothetische Roboterfahrzeuge, die 1984 von dem Südtiroler Hirnforscher, Kybernetiker und Schriftsteller Valentin Braitenberg für ein kybernetisches Gedankenexperiment ersonnen wurden. Diese sehr einfach konstruierten Fahrzeuge sind mit Sensoren ausgestattet und können autark auf Umweltreize reagieren. Dabei kann bereits durch verblüffend einfache Mechanismen ein überraschend komplexes Verhalten bewirkt werden.
Obgleich ursprünglich als Gedankenexperiment angelegt (Braitenberg spricht von einem „Spaziergang durch eine [erfundene] Spielzeugwelt“[1]), wurden inzwischen Implementierungen im Internet publiziert, und zwar sowohl als Software-Simulationen als auch in Form realer, elektronisch gesteuerter, mechanischer Roboter.
Mechanismus
Ein Braitenberg-Vehikel ist ein mit Sensoren ausgestattetes Fahrzeug, das sich autonom bewegen kann und durch Umweltreize, welche durch die Sensoren registriert werden, in seiner Bewegung beeinflusst wird. Obwohl ein solches Fahrzeug prinzipiell auch ein Wasser-, Luft- oder gar Raumfahrzeug sein könnte[1], veranschaulicht Braitenberg seine Gedankenexperimente mit einfachen, auf Rädern fahrenden Wägelchen. Diese haben am Heck ein oder zwei Antriebsräder mit jeweils eigenem Motor und am Bug einen oder mehrere Sensoren, die unterschiedliche Umweltreize wie Helligkeit, Schall oder Temperatur detektieren können. Durch eine Kopplung der Aktoren (der Antriebsmotoren) an die Sensoren werden die Antriebsräder gesteuert, wobei für diese Kopplung Varianten unterschiedlicher Komplexität betrachtet werden:
- Ein Sensor kann mehrere Antriebsmotoren beeinflussen oder nur einen,
- der Antriebsmotor kann auf derselben Fahrzeugseite liegen wie der Sensor oder auf der gegenüberliegenden,
- der Einfluss des Sensors kann verstärkend oder hemmend („inhibitorisch“) wirken,
- die Abhängigkeit des Motors vom Sensor kann linear oder monoton sein oder aber einer beliebigen mathematischen Funktion folgen, und schließlich können mehrere Sensoren für verschiedene Reizarten und mit jeweils unterschiedlich ausgebildeter Motor-Kopplung kombiniert werden.
Je nach Variante für die Kopplung der Sensoren und Aktoren ergibt sich ein mehr oder weniger komplexes Bewegungsverhalten des Fahrzeugs, das an (u. U. zielgerichtete) Verhaltensweisen von Lebewesen wie Flucht oder Aggression denken lässt. Aus diesem Grunde bezeichnet Braitenberg seine 14 Fahrzeugtypen auch als „Wesen“[1], und er zieht eine Parallele zwischen der Entwicklung seiner zunehmend komplexer werdenden Fahrzeugmodelle zur evolutionären „Entwicklung tierischer Arten“.[2]
Beispiele
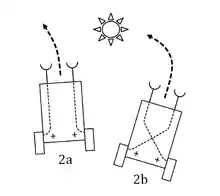
Wesen 2 ist mit zwei Antriebsrädern und zwei Helligkeitssensoren ausgestattet. Der Einfluss eines Sensors auf den ihm zugeordneten Antriebsmotor ist monoton-verstärkend: bei größerer Helligkeit dreht sich der Motor schneller, bei geringerer Helligkeit langsamer. Das Wesen existiert in zwei Varianten (siehe Abbildung oben): bei Wesen 2a wirkt der Sensor auf den Motor auf derselben Fahrzeugseite, bei Wesen 2b sind die Zuleitungen von den Sensoren zu den Motoren gekreuzt.
Die beiden Wesen zeigen wegen der unterschiedlichen Sensor-Aktor-Kopplung gegensätzliches Verhalten: Wesen 2a scheint das Licht zu fürchten, es weicht der Lichtquelle aus und kommt erst in hinreichend dunkler Umgebung zur Ruhe, Wesen 2b wird sich der Lichtquelle zuwenden und in scheinbar aggressiver Unruhe auf sie zusteuern.
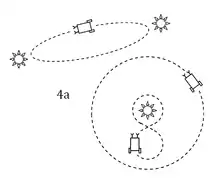
Wesen 4a entspricht im Wesentlichen der Konstruktion der Wesen vom Typ 2, allerdings ist die Abhängigkeit des Motors vom korrespondierenden Sensor nun nicht mehr monoton und linear: die Motorleistung erreicht bei einer bestimmten Reizintensität ein Maximum, bei Reizstärken oberhalb oder unterhalb dieses Wertes nimmt sie nichtlinear ab. Das Bild zeigt das mögliche Verhalten von Wesen 4a in der Umgebung einer oder mehrerer Reizquellen.
Siehe auch
Einzelnachweise
- Braitenberg: Vehikel 2004, S. 10
- Braitenberg: Vehikel 2004, S. 11
Literatur
(In der aufgeführten Literatur wird teilweise der deutsche Vorname „Valentin“ verwendet.)
- Valentin Braitenberg: Vehikel. Experimente mit künstlichen Wesen. LIT Verlag, Münster 2004, ISBN 3-8258-7160-6.
- Valentin Braitenberg: Künstliche Wesen. Verhalten kybernetischer Vehikel. Friedr. Vieweg & Sohn, Braunschweig / Wiesbaden 1986, ISBN 3-528-08949-0 (googlecode.com [PDF]).
- Valentino Braitenberg: Vehicles: Experiments in synthetic psychology. MIT Press, Cambridge 1984, ISBN 0-262-52112-1 (englisch).
- Markus Sebastian Müller: Die Braitenbergschen Fahrzeuge. Studienarbeit. GRIN Verlag, Norderstedt 2013, ISBN 978-3-638-84349-2.
Weblinks
- Beispielvideo zu Breitenberg Vehikel – die mit einer visuellen Programmiersprache bereits für Grundschulkinder geeignet sind.
- Mohamed Oubbati: Braitenberg Vehikel. Universität Ulm, 2012. (PowerPoint-Präsentation)
- Video eines mit LEGO realisierten Braitenberg-Vehikels vom Typ „Wesen 2“ auf YouTube. University of Alberta, 2008. (englisch)
- Interaktiver Braitenberg-Vehikel-Simulator. Reichsuniversität Groningen. (Java-Applet, niederländisch)
- Beispielvideos einer Software-Simulation von Braitenberg-Vehikeln. University of Chicago, 1998. (englisch)