Achsmotorantrieb
Der Achsmotorantrieb ist eine Antriebs-Bauart von Elektrolokomotiven und -Triebwagen. Er unterscheidet sich von den Bauarten Tatzlagerantrieb und Gestellmotorantrieb in der jeweiligen unterschiedlichen Anordnung des Fahrmotors.
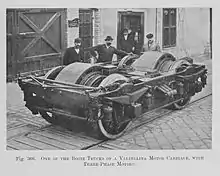
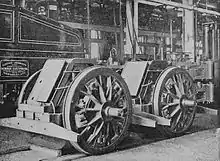
Der Achsmotorantrieb ist ein Direktantrieb mit konzentrisch zur Radsatzwelle des Treibradsatzes angeordnetem Fahrmotor.[1] Seine Ankerwelle ist identisch mit der Treibradsatzwelle. Diese Antriebsart wurde nur bei den ersten elektrisch angetriebenen Fahrzeuge verwendet und bald aufgegeben, da die Motoren sehr groß und schwer konstruiert werden mussten, um trotz des fehlenden Getriebes ein ausreichendes Drehmoment zu entwickeln (siehe Abbildungen).[1]
Geschichte
Die erste Anwendung von Achsmotoren ist aus dem Jahr 1869 bekannt, als in London der Rotor des Achsmotors auf der Radsatzwelle fest aufgekeilt und der Stator des Motors ebenfalls auf dem Radsatz gelagert war. Der Stator war über eine Drehmomentstütze mit Chassis des Fahrzeug verbunden.[2] Diese Gestaltung war ungünstig und konnte sich nicht durchsetzen, weil das Gewicht des Fahrmotors ungefedert auf dem Treibradsatz lag. Stöße des Radsatzes auf den Schienen und umgekehrt wurden nicht abgefedert und konnten zu Beschädigungen des Rotors und der Schienen führen.
Später wurde der Rotor nicht mehr unmittelbar auf die Radsatzwelle, sondern auf eine Hohlwelle aufgeschrumpft, welche die Radsatzwelle umschloss. Der Motorrahmen war im Drehgestell- oder Lokrahmen befestigt und die Übertragung auf die Antriebsräder geschah über Federtöpfe wie beim Hohlwellen-Antrieb. Mit diesem Antrieb wurden unter anderem die Drehstromtriebwagen der Studiengesellschaft für Elektrische Schnellbahnen sowie die RA 30 und 32 der Veltlinbahn[3] ausgerüstet. Das Gewicht des Stators belastete nur zu einem Teil die Antriebsräder und die Stöße waren minimiert. Einige Lokomotiven der New York, New Haven and Hartford Railroad waren mit Achsmotoren ausgerüstet und brachten es auf Leistungen bis zu 550 PS.[3]
Eine dritte Bauart wurde 1903 von der Firma General Electric vorgenommen. Diese Ausführung war nur für Gleichstrommaschinen geeignet. Bei ihr wurde der Rotor auf den Treibradsatz direkt aufgeschrumpft. Das Magnetfeld wurde durch einen Ständer erzeugt, welcher nur aus zwei waagerecht liegenden Polschuhen bestand, die mit dem Rahmen verschraubt waren und durch die Eisenmasse desselben magnetisch geschlossen wurde. Damit konnte der mit dem Antriebsrad mitschwingende Rotor einen gewissen Federweg des Radsatzes ausgleichen. Die Bauform bedingte einen größeren Luftspalt als bei anderen Antrieben, was ein schwächeres Magnetfeld zur Folge hat. Diese Anordnung wurde in den Vereinigten Staaten in großer Stückzahl bis 1918 gebaut und war bei der Baltimore and Ohio Railroad bekannt.[2]
Der Vorteil der Achsmotoren lag in der Anwendung bei hohen Geschwindigkeiten, wo praktisch keine Untersetzung in Kauf genommen werden mussten und damit ein Getriebe eingespart werden konnte. Das zeigt ihre Anwendung bei den Schnelltriebwagen der Studiengesellschaft für Elektrische Schnellbahnen. Dem standen eine ganze Reihe von Schwierigkeiten gegenüber. Die Leistung war durch den Raddurchmesser und der Spurweite begrenzt. Die Motoranordnung bedingte eine tiefe Schwerpunktlage, was für den Fahrzeuglauf nicht günstig war. Gleichfalls war durch die tiefe Anordnung der Motoren die Gefahr durch Verschmutzung der elektrischen Maschine groß. Motoren mit einer Untersetzung konnten ein bedeutend höheres Drehmoment übertragen. Deshalb beschränkte sich der Einsatz von Achsmotoren vorrangig auf Untergrundbahnen und Anwendungen, bei denen kein alltäglicher Einsatz zu erwarten war.[4] Sie werden heute im Schienenfahrzeugbau nicht mehr angewandt.
In der jüngeren Vergangenheit wurde beispielsweise von Siemens der Einsatz von Achsmotoren wieder untersucht, siehe Syntegra. Insbesondere durch den Einsatz von permanenterregten Synchronmotor in Kombination mit der Drehstromantriebstechnik ließen sich einige der oben genannten Nachteile beheben.
Aufbau
Charakteristisch für Achsmotorantriebe ist der konzentrische zur Radsatzwelle angeordnete Läufer des Fahrmotors, der diese ohne dazwischen geschaltetes Getriebe antreibt. Man unterscheidet zwischen den beiden folgenden Bauweisen:
- Achsmotorantrieb ohne Hohlwelle: Der Läufer ist hierbei fest mit der Radsatzwelle verbunden. Motor- und Radsatzwelle sind identisch. Der Motor zählt zu den ungefederten Massen.
- Achsmotorantrieb mit Hohlwelle: Der Rotor ist auf einer konzentrisch zur Radsatzwelle angeordneten Hohlwelle angebracht. Motor- und Hohlwelle sind identisch. Die Hohlwelle ist im Gestell gelagert. Der Motor zählt zu den gefederten Massen. Hohlwelle und Radsatz sind mittels elastischer Elemente als radialbewegliche Kupplung verbunden.
- Achsmotorantrieb mit Hohlwelle: Der Rotor ist auf einer konzentrisch zur Radsatzwelle angeordneten Hohlwelle angebracht. Motor- und Hohlwelle sind identisch. Die Hohlwelle ist mittels elastischer Elemente mit dem Radsatz verbunden. Diese Elemente dienen einerseits als federnde Lager für den Motor und andererseits als radialbewegliche Kupplung zwischenHohl- und Radsatzwelle. Der Motor zählt zu den gefederten Massen (weniger weich und mit weniger Hub gefedert als im Fall 2.)
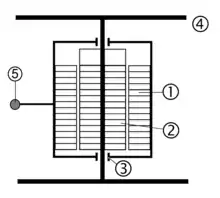 Achsmotorantrieb ohne Hohlwelle (Schema):
Achsmotorantrieb ohne Hohlwelle (Schema):
1) Ständer des Fahrmotors
2) Läufer des Fahrmotors auf Radsatzwelle
3) Lagerung des Fahrmotors (Gehäuse) auf Radsatzwelle
4) Radsatz
5) Drehmomentstütze am Gestell.png.webp) Achsmotorantrieb mit Hohlwelle (Schema):
Achsmotorantrieb mit Hohlwelle (Schema):
1) Ständer des Fahrmotors
2) Läufer des Fahrmotors auf Hohlwelle
3) Lagerung des Fahrmotors (Gehäuse) auf der Hohlwelle
4) Hohlwelle
5) Elastisches Element als radialbewegliche Kupplung zwischen Hohlwelle und Radsatz
6) Radsatz
7) Lagerung der Hohlwelle im Gestell
8) Drehmomentstütze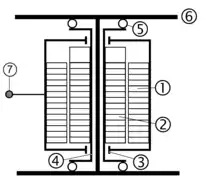 Achsmotorantrieb mit Hohlwelle (Schema, Variante):
Achsmotorantrieb mit Hohlwelle (Schema, Variante):
1) Ständer des Fahrmotors
2) Läufer des Fahrmotors auf Hohlwelle
3) Lagerung des Fahrmotors (Gehäuse) auf der Hohlwelle im
4) Hohlwelle
5) Elastisches Element zur Lagerung und Drehverbindung der Hohlwelle am bzw. mit dem Radsatz
6) Radsatz
7) Drehmomentstütze
Literatur
- Richard Bäcker: Über Antriebe und Bauarten elektrischer Lokomotiven. In: Elektrische Schienenfahrzeuge in Glasers Annalen 1909–1929. Transpress Reprint, Berlin 1990, ISBN 3-925952-11-X.
- Walter Kummer: Die Maschinenlehre der elektrischen Zugförderung. Springer-Verlag, Berlin/ Heidelberg, ISBN 978-3-662-42861-0 (Erstausgabe: 1915).
- Helmut Bendel: Die elektrische Lokomotive: Aufbau, Funktion, neue Technik. 2., bearb. und erg. Auflage. Transpress, Berlin 1994, ISBN 3-344-70844-9.
Einzelnachweise
- Helmut Bendel u. a.: Die elektrische Lokomotive, transpress, 1981, Seite 305
- Richard Bäcker: Über Antriebe und Bauarten elektrischer Lokomotiven. In: Elektrische Schienenfahrzeuge in Glasers Annalen 1909–1929. Transpress Reprint, Berlin 1990, ISBN 3-925952-11-X, S. 108.
- Walter Kummer: Die Maschinenlehre der elektrischen Zugförderung. Springer-Verlag, Berlin/ Heidelberg, ISBN 978-3-662-42861-0, S. 61 (Erstausgabe: 1915).
- E. E. Seefehlner, H. H. Peter: Elektrische Zugförderung. Handbuch für Theorie und Anwendung der Elektrischen Zugkraft auf Eisenbahnen. 2. Auflage. Springer-Verlag, Berlin/ Heidelberg, ISBN 978-3-642-50943-8 (Erstausgabe: 1922).