Schuler-Pendel
Ein Schuler-Pendel (Ausgleichspendel, Minimumpendel) ist ein für Präzisionspendeluhren verwendetes (physikalisches) Pendel, dessen Schwerpunkt einen Abstand zur Pendeldrehachse aufweist, der dem auf eine parallele Achse durch den Schwerpunkt bezogenen Trägheitsradius des Pendelkörpers entspricht und das auf elektromagnetischem Wege angetrieben wird. Derartige Pendel beruhen auf Vorschlägen von Maximilian Schuler, die er in zwei Patenten dargelegt hat.
Anmerkung: Das hier beschriebene Schuler-Pendel ist zu unterscheiden von dem gleichnamigen hypothetischen Pendel, das bei der Anwendung der Kreiseltheorie auf Navigationsprobleme von Bedeutung ist (siehe Schuler-Periode). Die Untersuchungen dazu wurden ebenfalls von Max Schuler durchgeführt.
Die von Riefler und Strasser Ende des 19., Anfang des 20. Jahrhunderts konstruierten und gebauten Präzisionspendeluhren wiesen durch Maßnahmen wie freie Hemmungen, Kompensationspendel, Betrieb in Wasserstoffatmosphäre und Temperaturregelung erstaunliche Ganggenauigkeiten auf. Eine Schwachstelle stellte die Pendelaufhängung dar. Diese ist bei Präzisionspendeluhren als Pendelfeder (dünne Blattfeder) oder als Schneidenlager ausgeführt. Pendelfedern unterliegen Längenänderungen durch Temperatureinflüsse oder im Laufe der Zeit auftretende Materialermüdung, während Schneidenlager einem gewissen Verschleiß durch Abrieb ausgesetzt sind. Das führt zu Änderungen der Pendellänge und damit zur Änderung der Schwingungsdauer, was wiederum Gangabweichungen der Uhren zur Folge hat. Hier wollte Schuler Abhilfe schaffen.
Ferner sollte nach seiner Intention das Pendel möglichst frei schwingen und die zur Aufrechterhaltung der Pendelschwingung notwendige periodische Energiezuführung nicht mehr mechanisch durch eine Hemmung, sondern störungsfrei elektromagnetisch erfolgen.
Pendel
 Pendelformen
Pendelformen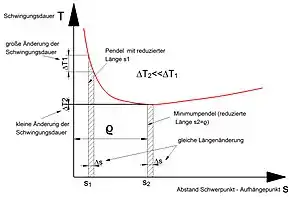 Minimum der Schwingungsdauer
Minimum der Schwingungsdauer
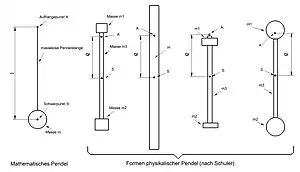
Die für Pendeluhren (auch für Präzisionsuhren) verwendeten Pendel können näherungsweise als mathematische Pendel angesehen werden (Pendelstange wird als masselos angenommen). Ihre Schwingungsdauer beträgt:


= Pendellänge, = Erdbeschleunigung.


Die Schwingungsdauer ist unabhängig von der Masse des Pendelkörpers und wird nur von der Pendellänge bestimmt.
Die Schwingungsdauer physikalischer Pendel errechnet sich mit der gleichen Formel, nur ist statt der Pendellänge die reduzierte Pendellänge einzusetzen. Diese hängt vom Trägheitsmoment des Pendels (also von seiner Masse und deren Verteilung) ab.


= Trägheitsmoment des Pendels bezogen auf eine durch den Schwerpunkt S verlaufende Achse (parallel zu Pendeldrehachse), = Pendelmasse, = Abstand des Schwerpunktes S von der Drehachse A (Aufhängepunkt) des Pendels.



Die reduzierte Pendellänge durchläuft in Abhängigkeit von ein Minimum. Das Minimum liegt bei

entspricht dem Trägheitsradius des Pendels bezogen auf seinen Schwerpunkt. In der Umgebung dieses Minimums ändert sich die reduzierte Pendellänge bei Änderung von (also z. B. bei Dehnung der Pendelfeder) und damit auch die Schwingungsdauer nur wenig (siehe Bild). Es ist also zweckmäßig, gleich dem Trägheitsradius zu wählen.

Deshalb hat Schuler vorgeschlagen, Präzisionspendeluhren mit einem derartig gestalteten Pendel zu bauen. Bei gleicher Längenänderung der Pendelfeder bzw. des Schneidenlagers ist mit einem Schuler-Pendel eine geringere Gangabweichung der Uhr im Vergleich zum mathematischen Pendel zu erreichen[1].
Es ist jedoch zu berücksichtigen, dass die Einflüsse von Längenänderungen des Pendelkörpers (z. B. auf Grund von Temperatureinflüssen) so nicht beseitigt werden können, sondern nur die der Pendelfeder bzw. des Schneidenlagers. Änderungen des Pendelkörpers führen zu Änderungen des Trägheitsmoments, somit zu einer anderen reduzierten Pendellänge und deshalb zu Gangabweichungen. Sie müssen durch andere Maßnahmen (z. B. Kompensationspendel) minimiert werden.
Beispiel
 Beispielpendel
Beispielpendel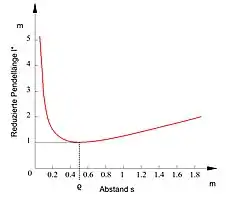 Verlauf der reduzierten Pendellänge
Verlauf der reduzierten Pendellänge
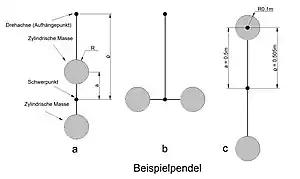
Ein aus zwei gleich großen zylindrischen Massen (Gesamtmasse ) mit dem Radius , die den gleichen Abstand vom Schwerpunkt aufweisen (masselose Verbindung angenommen), bestehendes Pendel besitzt das auf den Schwerpunkt bezogene Trägheitsmoment




Die im Bild mit a und b bezeichneten Varianten sind wegen des identischen Trägheitsmoments gleichwertig.
Legt man und fest, ist das Minimum für bei



Der Aufhängepunkt liegt im Mittelpunkt der einen zylindrischen Masse (siehe Bild Variante c).
Soll, wie bei Pendeluhren üblich, die Schwingungsdauer des Pendels Sekunden betragen (dann wird die Zeitanzeige im Sekundentakt weitergeschaltet; siehe Sekundenpendel), so muss die reduzierte Pendellänge den Wert aufweisen. Aus der Formel für die reduzierte Pendellänge



ergibt sich für die gewählten Werte eine nur geringe Abweichung vom geforderten . Wäre beispielsweise gewünscht, so ließe sich diese reduzierte Pendellänge mit der zugrunde gelegten Konstellation zwar realisieren, aber die Minimumbedingung wäre nicht erfüllt (vgl. Bild). Es sind also bei der Pendelauslegung immer beide Aspekte zu berücksichtigen.

Geht man beispielsweise sowohl für dieses Pendel als auch für ein mathematisches Sekundenpendel von einer Längenvergrößerung aus, ergibt sich mit der entsprechenden Änderung von gemäß Formel. Mit Hilfe der Schwingungsgleichung findet man, dass die Uhr mit dem mathematischen Pendel um 4,3 Sekunden am Tag nachgeht, während sich für eine Uhr mit Schuler-Pendel nur 0,0008 Sekunden ergeben!


Pendelantrieb
 Antriebsspule
Antriebsspule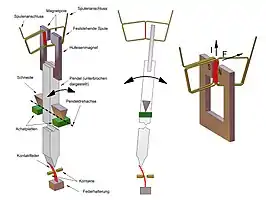 Pendelantrieb
Pendelantrieb
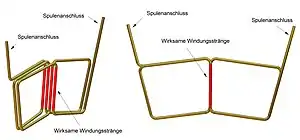
Beim Schuler-Pendel erfolgt der Pendelantrieb elektromagnetisch[2]. Das Pendel ist mit einem Hufeisenmagneten versehen, der sich relativ zu einer feststehenden Spule bewegt (vgl. Bilder). Die Spule ist in Form einer Acht gewickelt. In allen rot dargestellten Abschnitten der Spulenwicklung fließt der Strom in die gleiche Richtung, die durch die an den Spulenanschlüssen anliegende Spannung vorgegeben ist. Die rot dargestellten Windungsstränge sind die wirksamen Windungsabschnitte, da bei Stromfluss nur von ihnen eine Kraft auf den Magneten ausgeübt wird.
Der Hufeisenmagnet ist sehr schmal und weist einen kleinen Luftspalt auf, so dass das Magnetfeld nahezu homogen und auf den Luftspalt beschränkt ist. Bei Stromfluss durch die Spule übt diese eine Kraft (Lorentzkraft) auf den Magneten (und damit auf das Pendel) nur dann aus, wenn sich die wirksamen Abschnitte der Wicklung im Luftspalt des Magneten befinden. Damit wird erreicht, dass der Antriebsimpuls auf das Pendel weitgehend unabhängig von den (bei Federkontakten unsicheren) Schaltzeitpunkten des Spulenstroms sehr konstant ist, was für die konstante Schwingungsdauer des Pendels (und damit eine hohe Ganggenauigkeit der Uhr) vorausgesetzt werden muss. Es ist nur erforderlich, dass der Strom vor Eintritt der Spule in den Luftspalt des Magneten eingeschaltet und nach Austritt ausgeschaltet wird. Wie bei Pendeluhren üblich und zweckmäßig, erfolgt die Energiezufuhr im Bereich der (senkrechten) Mittellage des Pendels, wobei die Stromrichtung je nach Schwingungsrichtung des Pendels umzuschalten ist.
In seiner Patentschrift ging Schuler für die Schaltung der Stromimpulse davon aus, dass dies mit Hilfe einer vom Pendel betätigten Kontaktfeder (Blattfeder) geschieht, ließ jedoch andere Möglichkeiten offen. Die Federschaltung hätte die freie Pendelschwingung stark beeinträchtigt. Bei der späteren Realisierung wurde deshalb eine berührungslose Methode gewählt.
Schuler-Uhren
 Schuler-Pendel mit Arbeitsuhr
Schuler-Pendel mit Arbeitsuhr
Schuler-Uhren sind als Versuchsuhren gebaut und erprobt worden (u. a. von der Fa. Riefler)[3][4][5].
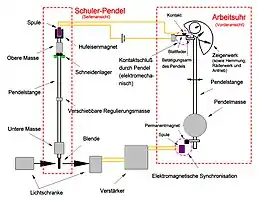
Die Schaltung der Stromimpulse wurde dabei mit einer vom Pendel gesteuerten Lichtschranke (also berührungsfrei ohne Federkontakte) realisiert. Es wurden Uhren mit Selbststeuerung und solche mit Steuerung über eine Arbeitsuhr („Sklavenuhr“, ähnlich der Shortt-Uhr) gebaut. In beiden Fällen konnte das Schuler-Pendel weitestgehend frei und unabhängig von zur Zeitanzeige dienenden Bauelementen schwingen.
Bei der selbstgesteuerten Variante dienten die Lichtschrankensignale zur Auslösung der Stromimpulse und zur Steuerung eines elektrisch betriebenen externen Zeigerwerks.
Die Ausführung mit Arbeitsuhr verwendete eine modifizierte Präzisionspendeluhr (z. B. mit Riefler-Schwerkrafthemmung), die mit den Lichtschrankensignalen des getrennt davon in einer Wasserstoffatmosphäre schwingenden Schulerpendels synchronisiert wurde und ihrerseits Stromimpulse zu dessen Ansteuerung lieferte sowie die Zeitanzeige übernahm. Die elektromechanische Erzeugung der Stromimpulse durch die Arbeitsuhr störte zwar deren Pendelschwingung geringfügig, was jedoch durch die Synchronisation ständig korrigiert wurde.
Schuleruhren konnten sich nicht durchsetzen. Dies lag insbesondere an der zu damaliger Zeit störanfälligen Elektronik (Lichtschranke, Röhrenverstärker) und dem daraus resultierenden Wartungsaufwand. Präzisionspendeluhren wurden von der Fa. Riefler noch bis 1965 gebaut (mit Riefler-Pendel). Schuler-Pendel wurden dafür nicht verwendet. Dann traten die Quarzuhren ihren Siegeszug an.
Einzelnachweise
- Max Schuler: Pendel für Zeitmessungszwecke. Abgerufen am 27. April 2019 (nach Aufruf "Volldokument laden" anklicken).
- Max Schuler: Elektrisch angetriebenes Pendel für Zeitmessungszwecke. Abgerufen am 27. April 2019 (nach Aufruf "Volldokument laden" anklicken).
- Gengler: Präzisionszeitmessung und Schuler-Pendel. Abgerufen am 27. April 2019.
- Weber: Das Schulersche Ausgleichspendel. Abgerufen am 27. April 2019 (nach Aufruf nach unten scrollen).
- Gockel/Schuler: Über eine neue Schuleruhr mit Selbstantrieb. Abgerufen am 27. April 2019.