Remote Center of Compliance
Ein Remote Center of Compliance (auch Remote-Center Compliance oder RCC) ist ein passives Ausgleichselement an Greifrobotern und Manipulatoren. Es dient als Fügehilfe, z. B. für das Einstecken von Bolzen, kommt ohne zusätzliche Sensoren oder Messsysteme aus und ermöglicht einem Industrieroboter, kleine Positionsfehler auszugleichen.[1]
Nachgiebige Elemente wie ein RCC sind eine Methode zum Ausgleich von kleinen Positions- und Winkelungenauigkeiten. Weitere passive Fügehilfen sind z. B. die Vibration oder eine schwimmende Lagerung (arretierbares Luftlager). RCC benötigen Fügehilfsflächen, wie zum Beispiel eine Fase (Abschrägung) an der Eintrittsöffnung oder einen angespitzten Bolzen.
Ein Instrumented Remote Center of Compliance (IRCC) enthält zusätzliche optische Sensoren, welche die Deformation der Elastomerelemente registrieren.[1]
Das RCC-Modul zählt als Roboterzubehör und wird zwischen dem Roboterhandgelenk und dem Greifwerkzeug eingefügt. Die Fähigkeit des Nachgebens bekommt es durch die Verwendung von Elastomergelenken oder mechanischen Federkonstruktionen.[2] Mit solchen Fügehilfen können Positionsungenauigkeiten von ca. ± 3 mm und Winkelungenauigkeiten von ca. ± 2° ausgeglichen werden.[3] Je nach Modell ermöglicht dies einen Ausgleich in allen drei translatorischen und rotatorischen Achsen (entspricht sechs verschiedenen Freiheitsgraden der Bewegung). Im Ergebnis benötigt der Industrieroboter weniger Kraft für solche Montageaufgaben, verliert jedoch seine Positionstreue in mehreren Achsen.
Das erste RCC-Modul wurde im US-amerikanischen Charles Stark Draper Labor entwickelt und im Jahre 1976 patentiert.[4]
Bauformen
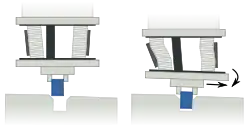
- Einfachste Bauform ist die, bei der zwei Flansche durch mehrere Elastomerelemente verbunden sind. Diese Elastomerelemente bestehen aus einer hohen Folge von dünnen Elastomerschichten und starren Schichten, zum Beispiel dünnen Metallplättchen. An der Längsseite befestigte starre Elemente (wie im Bild gezeigt) verhindern eine Dehnung der Elastomere, erlauben jedoch eine Verschiebung der einzelnen Schichten. Diese einfache Version wird nur bei kleinen Massen und langsamen Bewegungsabläufen eingesetzt. Bei höheren Teilgewichten und schnellen Verfahrbewegungen sollten aus Stabilitätsgründen eine größtmögliche Anzahl solcher Elastomerelemente innerhalb des RCC-Moduls verwendet werden.
- Zusätzlich integrierte Überlastbolzen begrenzen ein zu starkes Auslenken sowohl beim Fügen als auch beim Heranführen. Die Nachgiebigkeit kann durch einen integrierten Pneumatikzylinder arretiert werden. Solche Bauformen sollten bei kurzen Taktzeiten und großen zu bewegenden Massen verwendet werden.
- Ein zusätzlicher Mechanismus aus bis zu vier Gelenken kann eine Drehung um die Fügeachse bei Einwirken von Torsionsmomenten verhindern. Diese Bauform sollte eingesetzt werden wenn Trägheitskräfte bei schnellen Dreh- und Schwenkbewegungen zu starken Torsionsmomenten führen, oder auch wenn eine Übertragung von Torsionsmomenten beim Fügen (zum Beispiel bei einer Verschraubung) gefordert ist.
Anwendungen
Ein typisches Anwendungsgebiet ist das Einstecken von Bolzen in Bohrungen.[5] Ein Roboter bewegt seinen Greifer, mit dem er den leicht angespitzten Bolzen hält, wie in nebenstehender Abbildung zu sehen über ein leicht gesenktes Loch, in das der Bolzen eingefügt werden soll. Wurde die Einfügeposition nicht zu 100 % erreicht, kann der Bolzen trotzdem gerade in das Loch eingeführt werden, ohne dass sich der Bolzen verkantet, da das RCC-Modul die Ungenauigkeit dergestalt ausgleicht, dass es keine Verkippung, sondern nur eine laterale Verschiebung zulässt.
Ein weiteres Anwendungsgebiet ist die automatische Bestückung von Leiterplatten bei der Durchsteckmontage.
Literatur
- David D Ardayfio: Fundamentals of robotics. M. Dekker, New York 1987, ISBN 0-8247-7440-X (eingeschränkte Vorschau in der Google-Buchsuche).
Einzelnachweise
- Jürgen Rogos: Intelligente Sensorsysteme in der Fertigungstechnik. Berlin ; New York : Springer-Verlag, 1989, ISBN 978-3-540-51488-6, eingeschränkte Vorschau in der Google-Buchsuche
- T. Takamori, K. Tsuchija: Robotics, Mechatronics and Manufacturing Systems, in Transactions of the IMACS/SICE International Symposium on Robotics, Mechatronics and Manufacturing Systems, Kobe, Japan 16-20 September 1992, ISBN 0-444-89700-3, eingeschränkte Vorschau in der Google-Buchsuche
- Herstellerangaben (abgerufen am 20. Mai 2017)
- Patent US4098001: Remote center compliance system. Veröffentlicht am 4. Juni 1978, Erfinder: Paul C. Watson.
- Dieter W. Wloka: Robotersysteme 1 : Technische Grundlagen. Berlin, Heidelberg : Springer Berlin Heidelberg, 1992, ISBN 978-3-642-93510-7, eingeschränkte Vorschau in der Google-Buchsuche