Magnetostriktiver Wegaufnehmer
Magnetostriktive Wegaufnehmer dienen zur Messung der Entfernung zwischen zwei Punkten. Der Sensor besteht aus einer fixen Basis, einem Wellenleiter, einem beweglichen Permanentmagneten sowie einem Wandler, der eine mechanische Schwingung in ein elektrisches Signal umsetzt. Das Ergebnis des Wegaufnehmers ist die Position, welche mit Hilfe der Magnetostriktion ermittelt wird. Das Messsystem ist weitgehend unempfindlich gegenüber Umwelteinflüssen wie Temperatur, Erschütterung, Schock, Vibrationen und Verschmutzung. Ein Einsatzbeispiel sind Walz-, Stahlwerke sowie Füllstandmessung in Tanks.
Aufbau
Das Messelement ist der Wellenleiter und besteht aus einem magnetostriktiven Material. Dies kann z. B. ein Röhrchen aus einer Nickel-Eisen-Legierung mit 0,7 mm Außen- und 0,5 mm Innendurchmesser sein. Durch dieses Rohr ist ein Kupferleiter gefädelt. Eine alternative Bauform besteht z. B. aus einem Nickeldraht mit 0,8 mm Außendurchmesser.
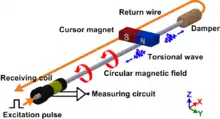
Der Messvorgang wird durch einen kurzen Stromimpuls durch den Kupferinnenleiter bzw. den Nickeldraht direkt ausgelöst. Der Strom erzeugt ein zirkulares Magnetfeld, das auf Grund weichmagnetischer Eigenschaften des Wellenleiters in diesem gebündelt wird. An der zu messenden Stelle des Weges ist ein beweglicher Permanentmagnet als Positionsgeber eingesetzt, dessen magnetischen Feldlinien rechtwinkelig zum Impulsmagnetfeld verlaufen und ebenfalls im Wellenleiter gebündelt sind. In dem Bereich des Wellenleiters, wo beide Magnetfelder sich überlagern, entsteht im Mikrobereich des Kristallgefüges eine elastische Verformung durch Magnetostriktion, die eine sich nach beiden Seiten ausbreitende, mechanische Welle erzeugt. Die zum Ende des Wellenleiters laufende Welle wird dort weggedämpft, während die zum Signalwandler laufende Welle durch Umkehrung des magnetostriktiven Effektes ein elektrisches Signal erzeugt. Alternative Bauformen dämpfen das Signal in Richtung des Wellenleiterendes nicht ab, sondern lassen es dort reflektieren. Dies hat den Vorteil, dass man das reflektierte Signal zur Fehleranalyse und Temperaturkompensation verwenden kann.
Messung
Die Fortpflanzungsgeschwindigkeit der Welle im Wellenleiter beträgt z. B. 2800 m/s und ist recht unempfindlich gegenüber Umwelteinflüssen. Dadurch, dass die Geschwindigkeit der Welle im Leiter (z. B. durch Kalibrierung) bekannt ist und die Zeit zwischen dem Senden des Stromimpulses und dem Empfangen des magnetostriktiven Echos gemessen wird, lässt sich der Weg näherungsweise ermitteln nach:



Dadurch kann der Abstand mit einer, nur durch die Auflösung der Zeitmessung beschränkten Genauigkeit bestimmt werden. Typische Anordnungen erreichen Auflösungen von ca. 1 µm.

Fehlerquellen
Ein Nachteil dieser Methode ist, dass u. a. die Fortpflanzungsgeschwindigkeit der Welle im Leiter von der Temperatur des Leiters abhängt:


Wenn keine Maßnahmen zur Kompensation dieser Abweichung getroffen werden, wird die Messung mit zunehmender Abweichung der Leitertemperatur von der Kalibriertemperatur (i. d. R. Raumtemperatur) ungenauer.
Literatur
- David S. Nyce: Linear Position Sensors: Theory and Application. John Wiley & Sons, Hoboken (NJ) 2003, ISBN 0-471-23326-9.