Lawotschkin La-17
Die Lawotschkin La-17 (russisch Лавочкин Ла-17) war die erste Ziel- und Aufklärungsdrohne der Sowjetunion und wurde in vielen Varianten von 1954 bis 1993 in Serie produziert.
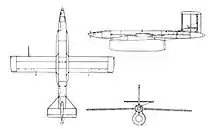
| Lawotschkin La-17 | |
|---|---|
.jpg.webp) | |
| Typ: | Ziel- und Aufklärungsdrohne |
| Entwurfsland: | |
| Hersteller: | OKB Lawotschkin |
| Erstflug: | 13. Mai 1953[1] |
| Produktionszeit: | 1954–1993 |
Geschichte
In den frühen 1950er Jahren wurde in der Sowjetunion der dringende Bedarf an einer vielseitig einsetzbaren Zieldrohne für die Jagdflieger und Luftabwehr festgestellt. Mit der Einführung der ersten boden- und luftgestützten Flugabwehrraketen wurde der Einsatz von geschleppten Zielsäcken durch bemannte Flugzeuge zur Zieldarstellung zu gefährlich. Weil es zu dieser Zeit kein eigenes Konstruktionsbüro für solche unbemannte Drohnen gab, wurde der Flugzeug- und Flugabwehrraketenkonstrukteur Lawotschkin (LaGG-3, La-5, SA-2 uvm.) mit der Entwicklung beauftragt. Die neue Zieldrohne sollte die gleichen Flugeigenschaften wie ein modernes Kampfflugzeug zu jener Zeit haben und möglichst einfach und kostengünstig hergestellt werden können.
Konstruktion
Das Aussehen der La-17 (intern Erzeugnis 201) ähnelt einer fliegenden Bombe mit Tragflächen und hohem Leitwerk. Als Antrieb wurde letztlich das Staustrahltriebwerk RD-900 ausgewählt, das unter den Rumpf gehängt wurde. Ein Staustrahlantrieb ist zwar einfach herzustellen, muss aber auf eine Mindestgeschwindigkeit beschleunigt werden, bevor er zuverlässig funktioniert. Anfangs wurden deswegen umgerüstete Bomber Tupolew Tu-4 als Trägerflugzeuge verwendet. Nach der Trennung vom Trägerflugzeug konnte der Autopilot oder der Bediener in der Bodenstation die Drohne über das Übungsgebiet steuern. Obwohl die La-17 als Einmalprodukt entworfen wurde, konnte es im Falle eines unbeschadeten Einsatzfluges landen und wiederverwendet worden. Bei der dafür notwendigen Bauchlandung diente das nur für wenige Flugminuten ausgelegte Staustrahltriebwerk als Puffer und wurde ausgetauscht.
Ein Propeller an der Spitze trieb im Flug den Generator zur Stromversorgung der Bordsysteme an. Bei den 1953 durchgeführten Flugversuchen stellte man fest, dass der Radarquerschnitt für die damaligen Radarempfänger zu gering war und durch radarreflektierende Spiegel vergrößert werden musste. Dadurch konnte die La-17 auch sehr erfolgreich zum Testen neuentwickelter Boden-Luft und Luft-Luft-Raketen eingesetzt werden.
Nach einiger Zeit im operationellen Einsatz stellten sich auch schnell gravierende Nachteile heraus. Der größte war die Abhängigkeit vom Trägerflugzeug Tu-4. Die wenigen umgebauten Maschinen waren an Flugplätze gebunden und damit unflexibel einsetzbar und teuer im Betrieb. Als Alternative kam nur eine bodengestartete Variante in Frage. Als Abschussplattform diente dazu eine umgebaute Lafette der 100-mm-Flugabwehrkanone. Zwei abwerfbare Feststoffraketen vom Typ PRD-98 starteten die neue Version mit der Bezeichnung La-17A (Erzeugnis 201A), bevor das Haupttriebwerk den Steigflug übernahm.
Weiterentwicklungen der Zieldrohne
Die La-17A stellte aber nur eine unbedeutendere Zwischenversion zur La-17M (Erzeugnis 202) dar, die über viele maßgebende Verbesserungen verfügte. Der bisher verwendete Staustrahlantrieb erwies sich als zu treibstoffdurstig, um genügend Flugzeit und damit Übungszeit gewährleisten zu können. Unter schlechten Bedingungen hatten die Jagdfliegerpiloten lediglich einen Anflug für ihren Angriff, weil die Drohne danach bereits in den Landegleitflug übergehen musste. Als Triebwerk wurde in der La-17M ein Strahltriebwerk vom Typ Tumanski RD-9BK gewählt. Es unterschied sich von der in der MiG-19 eingebauten RD-9B-Version durch den fehlenden Nachbrenner, den festen Lufteinlauf und eine kurze Lebenszeit. Weitere Verbesserungen betrafen die Funksteuerung von der Bodenstation, den Autopiloten und die Energieversorgung der Systeme durch einen turbinengetriebenen Generator.
Ab 1960 wurde die La-17M sehr erfolgreich als Zieldrohne bei den Land-, Luft- und Seestreitkräften eingesetzt. Die nächste Entwicklungsstufe unterschied sich nur durch das leicht modifizierte RD-9BKR-Triebwerk von den Vorgängern und wurde als La-17MA (Erzeugnis 202) bezeichnet. Die kriegerischen Auseinandersetzungen in den 60er Jahren zeigten, dass Kampfflugzeuge immer öfter im Tiefflug operieren, um der Entdeckung durch Radar zu entgehen und der Bedrohung durch moderne Luftabwehrraketen zu entkommen. Diese Szenarien konnten mit der La-17M aufgrund ihrer minimalen Einsatzhöhe von 3.000 m allerdings nicht geübt werden, weshalb dringend nach einem geeigneteren Nachfolger gesucht wurde.
Die Weiterentwicklung mit der Bezeichnung La-17MM (Erzeugnis 202M) konnte in Höhen von 500 m bis 18.000 m operieren. Dafür wurden die weiterhin verwendeten Triebwerke so nachgerüstet, dass die Höchstgeschwindigkeit in Bodennähe automatisch begrenzt wurde und damit die strukturellen Belastungen im Tiefflug gering blieben. Im Gegensatz zu den Staustrahltriebwerken sind Turbinenstrahltriebwerke, vereinfacht ausgedrückt, nicht nur leere Rohre, sondern haben mit Verdichter- und Turbinenstufen ein massives Innenleben. Deswegen entwickelten die Konstrukteure unter das Triebwerk montierbare Schockabsorber. Falls die Zieldrohne einen Einsatz unbeschädigt überstand, minderten diese Absorber die Wucht der Bauchlandung und konnten anschließend ausgetauscht werden. Weitere Verbesserungen umfassten einen neuen Autopiloten. Für die La-17 wurden allerdings nicht neue, sondern umgebaute und überholte Triebwerke verwendet, die bereits in MiG-19-Maschinen das Ende ihrer Lebensdauer erreicht hatten.
Als sich Ende der 1960er-Jahre das Einsatzende der MiG-19 abzeichnete, versiegte damit auch die Triebwerksquelle für die Drohnen. Die Nachfolgegeneration wurde daher mit dem aus dem MiG-21-Triebwerk Tumanski R-11 abgeleiteten R-11K ausgerüstet. Auf den Nachbrenner wurde verzichtet. Die neue Drohnenvariante bekam von den Konstrukteuren die Bezeichnung La-17K, erhielt von offizieller Seite allerdings keine neue Bezeichnung. Neben dem veränderten Antrieb wurde auch die Zelle verstärkt und zahlreiche Verbesserungen in der Elektrik und Autopiloten, beim Treibstoffsystem sowie bei der Bodenstation vorgenommen. Von 1978 bis 1993 blieb die La-17K in Produktion. In dieser Zeit wurden nur kleinere Modifikationen vorgenommen, um Weiterentwicklungen des R-11K nutzen zu können.
Nutzung
Noch im Jahr 1999 wurde eine La-17 bei einer Übung des russischen Militärs als Zieldrohne verwendet. Es ist aber unbekannt, bis wann die Nutzung der Drohnen genau erfolgte und wie viele Exemplare insgesamt produziert wurden. Vermutlich waren es insgesamt einige tausend Ziel- und Aufklärungsdrohnen. Das als Nachfolgemodell vom Konstruktionsbüro Sokol entwickelte System Dan flog 1993 das erste Mal und ersetzte in den folgenden Jahren die La-17 als Zieldrohne.
Ende der 50er Jahre erhielt die Volksrepublik China einige Zieldrohnen La-17 von der Sowjetunion. Nach dem politischen Bruch zwischen beiden Staaten entwickelten die chinesischen Konstrukteure auf Basis der La-17 eine eigene Zieldrohnengeneration mit der Bezeichnung ChangKong-1 (CK-1).
Die erste sowjetische Aufklärungsdrohne

Die Verwundbarkeit von Aufklärungsflugzeugen gegenüber den neuentwickelten Flugabwehrraketen Ende der 50er Jahre führten bei den sowjetischen Luftstreitkräften, wie auch in den USA, zur Entwicklung von unbemannten Aufklärungsdrohnen.[2] Kurz nachdem die erste Variante der Zieldrohne La-17 zur Einsatzreife gelangte, wurde von Seiten der Streitkräfteführung entschieden eine Aufklärungsvariante daraus zu entwickeln. Sie sollte die Fähigkeit besitzen durch Luftabwehr stark geschützte oder durch den Einsatz von ABC-Waffen kontaminierte Ziele aufzuklären. Die erste Version mit der Bezeichnung La-17R (Erzeugnis 204) basierte noch auf der La-17M mit Staustrahltriebwerk, in dessen Spitze eine AFA-BAF-40R Kamera eingebaut wurde. Mit einer Reichweite von 170 km und der Abhängigkeit vom Trägerflugzeug Tu-4 genügte sie allerdings nicht den Anforderungen bezüglich Aufklärungstiefe und Flexibilität. Auch die reichweitengesteigerte Variante La-17BR war immer noch auf die Tu-4 angewiesen.
Im Jahr 1958 begann die Entwicklung eines neuen Aufklärungssystems auf Basis der La-17M. Die um einen halben Meter gestreckte Drohne trug abermals die Bezeichnung La-17R und das gesamte System einschließlich der Start- und Führungsfahrzeuge die Bezeichnung TBR-1 (Taktitscheski bespilotny raswedtschik – taktischer unbemannter Aufklärer). Äußerlich ist die La-17R leicht durch den abgeflachten Rumpfboden im Vorderteil zu erkennen. Darin fand die Aufklärungstechnik Platz, die für einen kreisrunden Rumpfquerschnitt zu groß war. Für den Transport konnten bei der Drohne die Flügel und die hintere Rumpfsektion angeklappt werden.
Die verwendeten Kameras waren mit den in bemannten Aufklärungsflugzeugen eingesetzten Typen identisch. Die Kameras reichten von den ASchtschFA-5E und ASchtschFA-5M für Panoramaaufnahmen über die hochauflösenden AFA-20, AFA-BA-40, AFA-BAF-21 bis hin zu einer TV-Kamera oder ein Messapparat für ionisierende Strahlung.
Der Aufklärungsflug konnte vollständig autonom oder funkferngesteuert erfolgen. Für den autonomen Flug wurden der Flugweg, die Flughöhe und der Kameraeinsatz über eine Zeitschaltung programmiert. Das Bodenleitradar ermöglichte der Drohne Kurskorrekturen während der Autopilot Flugrichtung und Fluglage regelte. Im ferngesteuerten Betrieb sendete der Radartransponder SO-129-P verschlüsselte Signale an die Bodenstation. Damit konnte der Operator am Boden den Flug überwachen und Steuersignale für die Drohne und die Kameras senden. Eine typische Aufklärungsmission erfolgte in Höhen zwischen 600 und 7000 Meter in einem Radius bis zu 250 km. Im Jahr 1962 kamen die ersten einsatzbereiten Systeme zu den Streitkräften, blieben 20 Jahre und wurden bei zwei Staffeln in der Ukraine und jeweils einer Staffel in Weißrussland und Lettland eingesetzt.[2]
Anfang der 80er Jahre übernahmen die unbemannten Aufklärungssysteme WR-3 Rejs aus dem Konstruktionsbüro Tupolew deren Aufgaben.
Versionen
- La-17 – erste Version mit Staustrahltriebwerk RD-900, Trägerflugzeug Tu-4,
- La-17M – bodengestartete Weiterentwicklung mit RD-9BK Turbojet als Antrieb
- La-17N – zum Bodenstart umgerüstete La-17 mit Staustrahltriebwerk
- La-17MA – Weiterentwicklung auf Basis La-17M mit programmierbarem Autopiloten
- La-17MM – Weiterentwicklung mit RD-9BKR Turbojet und weiteren Verbesserungen
- La-17K – Version mit Tumanski R11K-Triebwerk und weiteren Modifikationen
Aufklärungsversionen
- La-17R – erste Aufklärungsversion auf Basis der Tu-4-gestarteten La-17
- La-17BR – reichweitengesteigerte Aufklärungsdrohne auf Basis der La-17
- La-17R – zweite Nutzung der Bezeichnung für die Drohne des Systems TBR-1 auf Basis der La-17M
- La-17RM – weiterentwickelte Aufklärungsdrohne auf Basis der La-17MM
- La-17RU – zur Kostenreduzierung modifizierte Aufklärungsdrohne La-17RM
- La-17UM – wie Aufklärungsdrohne La-17RU, ohne Kameras und mit RD-9BK MkII
Technische Daten
| Kenngröße | La-17 | La-17M | La-17K |
|---|---|---|---|
| Länge | 8,435 m | ||
| Spannweite | 7,5 m | ||
| Höhe | n.b. | 2,98 m | n.b. |
| Startgewicht | 1810 kg | 3065 kg | 3100 kg |
| Höchstgeschwindigkeit | 900 km/h | 880 km/h | 900 km/h |
| Dienstgipfelhöhe | 10.000 m | 17.000 m | 17.500 m |
| Reichweite | n.b. | 490 km | n.b. |
| max. Flugdauer | 40 min | 60 min | 60 min |
| Triebwerk | RD-900 | Tumanski RD-9BK | Tumanski R-11K |
| Schub | 19,12 kN | 24,02 kN | |
Siehe auch
Literatur
- Jefim Gordon: Red Star Volume 20 – Soviet/Russian Unmanned Aerial Vehicles, 2005, Midland Publishing, Hinckley, England S. 5–26
- Steven J. Zaloga: Unmanned Aerial Vehicles. In: Osprey New Vanguard. Nr. 144, 2008, S. 17
Einzelnachweise
- Wilfried Kopenhagen: Die V1 und ihre sowjetischen Kinder. In: Waffen-Arsenal Nr. 24, Podzun-Pallas, Wölfersheim-Berstadt 1999, S. 35
- Steven J. Zaloga: Unmanned Aerial Vehicles (= Osprey New Vanguard. Nr. 44). 2008, S. 17.