KUSA-Schaltung
Die KUSA-Schaltung (Kurzschlussläufersanftanlauf-Schaltung) ist eine elektrische Schaltung, mit der es möglich ist, das Anlaufdrehmoment von Drehstrommotoren mit Kurzschlussläufer herabzusetzen, um somit einen Sanftanlauf des Motors zu ermöglichen.[1]
Aufbau und Funktion
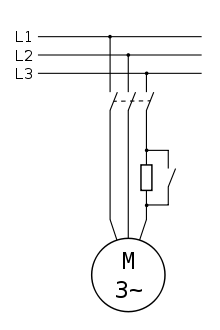
In eine der drei Motorzuleitungen wird während der Hochlaufphase des Motors ein Dämpferwiderstand (Anlasswiderstand) oder eine Drosselspule geschaltet, der nach Erreichen der Nenndrehzahl wieder überbrückt wird.[2] Dadurch verringert sich die Spannung in der beschalteten Motorwicklung entsprechend der Größe des Vorwiderstandes.[3] Die Anlaufströme in den beiden Zuleitungen werden allerdings etwas größer als bei direktem Anlauf.[4] Durch diese Änderung des Stromes verändert sich die Größe des magnetischen Flusses, es entsteht eine Unsymmetrie des Drehfeldes.[3] Bedingt durch die Unsymmetrie der Statorströme geht das „Drehfeld“ in eine Ellipsenform über. Die Drehzahl des Motors ändert sich bei der KUSA-Schaltung nicht.[4] Mit abnehmender Stromstärke wird die Spannungsunsymmetrie an den Motoranschlüssen geringer.[3] Nach dem Hochlaufen des Motors wird der Anlasswiderstand mittels eines Schaltkontaktes überbrückt.[1]
Bei einem phasenausfallempfindlichen Motorschutzrelais kann es bei langen Anlaufzeiten zum Auslösen des Motorschutzrelais kommen, deshalb sind Motorschutzrelais für einphasigen Kurzschlusssanftanlauf nicht geeignet. Hier verwendet man Motorschutzrelais ohne Phasenausfallerkennung. Da die Dimensionierung und Berechnung in der Praxis aufgrund der unterschiedlichen Lastverhältnisse und Steuerungen des Motors sehr ungenau ist, wird der „Kusawiderstand“ großzügig bemessen und vor Ort optimal an die Lastverhältnisse angepasst.[2] Vielfach wird anstelle des „Kusawiderstandes“ ein Sanftanlaufgerät eingesetzt. Diese Geräte arbeiten nach dem Prinzip der Phasenanschnittsteuerung, dadurch lässt sich der Strom in der beschalteten Motorzuleitung zwischen Null und Nennstrom ändern.[5]
Drehfeld und Drehmomentbetrachtung
Das Anlaufdrehmoment lässt sich in weiten Bereichen beeinflussen.[6] Bei einem unendlich großen Vorwiderstand ist der Motor nur mit zwei Wicklungen angeschlossen, die Maschine entwickelt kein Drehfeld, sondern nur ein Wechselfeld.[7] Das aufschwellende und abschwellende Wechselfeld lässt sich vergleichen mit zwei gleich großen Drehfeldern welche unterschiedliche Drehrichtungen besitzen.[6] Da auch kein Anlaufdrehmoment erzeugt wird, läuft der Motor nicht an. Der Motor verhält sich so, als würden zwei gleich starke Motoren auf einer Welle sitzen und gegeneinander drehen.[3] Während der eine Motor versucht, die Welle zu drehen, wirkt der andere Motor praktisch als Bremse. Ohne Vorwiderstand wird ein reines Drehfeld gebildet und der Motor läuft mit normalem Anlaufdrehmoment an. Bei Widerstandswerten, die zwischen den beiden Extremen liegen, entsteht in der Maschine ein „Drehfeld“, das umso schwächer wird, je größer der Wert des Anlaufwiderstandes ist. Dieses Feld verändert dann je nach Größe des Vorwiderstandes die kreisrunde Drehfeldform in eine Ellipsenform.[6]
Vor- und Nachteile
- Vorteile
- sanfter ruckfreier Anlauf
- einfacher Schaltungsaufbau
- Stöße und Schläge in Getriebe oder Übertragungsteile werden vermieden
Quelle:[3]
- Nachteile
- unsymmetrische Belastung der Außenleiter
- nur für Motoren bis maximal 5 kW geeignet
- in öffentlichen Netzen meistens nur für Motoren bis 2,2 kW zugelassen
- Auslösung des Phasenausfallschutzes möglich
Quelle:[2]
Einsatzbereiche
Die KUSA-Schaltung wird bei Motoren bis maximal 5 kW eingesetzt, wenn das Anlaufdrehmoment einen bestimmten Grenzwert nicht überschreiten darf.[5] Der Hauptanwendungsbereich ist bei Textilmaschinen, da es bei diesen Maschinen auf einen besonders sanften und stoßfreien Anlauf ankommt.[7] Bei größeren Motoren wird, aufgrund der Verluste am Vorwiderstand, diese Schaltung nicht angewendet.[8]
Einzelnachweise
- FANAL Schaltungspraxis. 7. Auflage, Metzenauer & Jung GmbH, Wuppertal.
- Helmut Greiner: Anlaufen, Bremsen, Positionieren mit Drehstrommotoren. Danfoss Bauer GmbH, Esslingen 2001, Online (PDF; 9,1 MB) (abgerufen am 7. Mai 2015).
- Günter Boy, Horst Flachmann, Otto Mai: Die Meisterprüfung Elektrische Maschinen und Steuerungstechnik. 4. Auflage, Vogel Buchverlag, Würzburg 1983, ISBN 3-8023-0725-9, S. 129.
- Ernst Hörnemann, Heinrich Hübscher: Elektrotechnik Fachbildung Industrieelektronik. 1. Auflage. Westermann Schulbuchverlag GmbH, Braunschweig 1998, ISBN 3-14-221730-4.
- Detlev Roseburg: Elektrische Maschinen und Antriebe. Fachbuchverlag Leipzig im Carl Hanser Verlag, 1999, ISBN 3-446-21004-0.
- Klaus Fuest, Peter Döring: Elektrische Maschinen und Antriebe. 6. Auflage, Friedrich Vieweg Sohn Verlag/GWV Fachverlage GmbH, Wiesbaden 2004, ISBN 3-528-54076-1.
- Franz Moeller, Paul Vaske (Hrsg.): Elektrische Maschinen und Umformer. Teil 1 Aufbau, Wirkungsweise und Betriebsverhalten, 11. überarbeitete Auflage, B. G. Teubner, Stuttgart 1970, S. 140.
- Gregor D. Häberle, Heinz O. Häberle: Transformatoren und Elektrische Maschinen in Anlagen der Energietechnik. 2. Auflage, Verlag Europa-Lehrmittel, Haan-Gruiten 1990, ISBN 3-8085-5002-3.