H-unendlich-Regelung
Die H∞-Regelung ist ein Verfahren zur Systemanalyse und Reglersynthese aus dem Bereich der robusten Regelungstechnik. Zur Anwendung des Verfahrens muss die Regelungsaufgabe als Optimierungsproblem formuliert werden, was einen relativ hohen mathematischen Aufwand erfordert. Die Vorteile des Verfahrens liegen in der breiten Anwendbarkeit im Bereich von SISO- und MIMO-LTI-Systemen, der Erweiterbarkeit auf nichtlineare Probleme und, bei gutem Design, sehr robust performanten Regelungsergebnissen bei Gewährleistung der Stabilität.
Beim modellbasierten Reglerentwurf fließen stets Unsicherheiten in die Regelung ein, welche durch die Modellerstellung entstehen. Eine Regelung kann dann als robust bezeichnet werden, wenn sie unempfindlich gegenüber diesen Modellungenauigkeiten ist, die Regelgüte also nicht stark beeinträchtigt oder gar die Stabilität gefährdet wird. Die Grundlage des H∞-Entwurfs ist die Modellierung der bekannten Modellunsicherheiten, was zu einer erweiterten Übertragungsfunktion führt, die dann Grundlage zur numerischen Berechnung des H∞-Reglers ist. Die Bezeichnung "H∞" rührt aus der mathematischen Theorie, welche dem Verfahren zu Grunde liegt und bezeichnet die Vektornorm eines Hardy-Funktionenraum.
Die H∞- Norm

Die -Norm ist eine Vektornorm für den Hardyraum mit . Im mathematischen Kontext stellen Hardyräume Spezialfälle der -Banachräume dar, in welchen holomorphe Funktionen auf ihre Integrierbarkeit untersucht werden können. Der -Raum beinhaltet entsprechend alle holomorphen Funktionen (jeder Funktionswert ist in komplex differenzierbar), die in der oberen rechten Hälfte der komplexen Ebene () beschränkt sind. Eine mathematische Norm, die einem Raum zugeordnet ist, charakterisiert die "Größe" eines Objekts dieses Raums, also z. B. die Länge bzw. der Betrag eines Vektors.






Im Falle der in der Systemtechnik interessierenden Übertragungsfunktionen beschreibt die -Norm den Maximalwert des Amplitudengangs einer untersuchten Übertragungsfunktion. Im SISO-Fall bedeutet dies einfach:

Die allgemeine Berechnungsvorschrift des Supremums lautet:

Im MIMO-Fall wird hingegen der maximale Singulärwert der Übertragungsmatrix ermittelt:

Modellierung der Unsicherheiten
Die Modellierung der Unsicherheiten, die bei der Modellerstellung vorliegen, ist die Basis für den späteren Reglerentwurf. Es ist wichtig, hier sorgfältig vorzugehen, denn eine Optimierung in eine falsche Richtung kann mehr Schaden anrichten, als dass eine robuste Regelung synthetisiert wird. Modellunsicherheiten lassen sich unterscheiden in parametrische und dynamische Unsicherheiten:
Parametrische Unsicherheiten
Parametrische Unsicherheiten sind dem Namen nach bei der Modellidentifikation schwankende oder allgemein variante Parameter. Dargestellt wird eine solche Unsicherheit durch einen nominellen Wert des unsicheren Parameters zuzüglich eines Unsicherheitsterms:

- mit und



Dabei sind eine dimensionslose relative Schwankung, ein nomineller Wert des Parameters (gewöhnlich in der Mitte des Schwankungsbereichs) und die Unsicherheitsvariable. Ausmultipliziert kann mit der Parameterunsicherheit ersetzt werden:






Dynamische Unsicherheiten
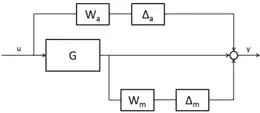
Dynamische Unsicherheiten entstehen durch bei der Modellidentifikation nicht berücksichtigte oder bei einer Modellordnungsreduktion verloren gegangene Dynamiken. Dynamische Unsicherheiten sind frequenzabhängig und können auf verschiedene Arten vorliegen. In der Abbildung rechts ist ein System mit einer additiven und einer multiplikativen Unsicherheit mit dem jeweiligen Unsicherheitsgewicht und der Unsicherheitsmatrix dargestellt.


Je nach Art der dynamischen Unsicherheit wird das unsichere System bzw. die unsichere Systemmatrix bzgl. des nominellen Systems folgendermaßen gebildet (jeweils mit ):

- Multiplikative Unsicherheit am Eingang:

- Multiplikative Unsicherheit am Ausgang:

- Multiplikative Unsicherheit invers am Eingang:

- Multiplikative Unsicherheit invers am Ausgang:

Additive können in multiplikative Unsicherheiten transformiert werden.
Linear Fraction Representation
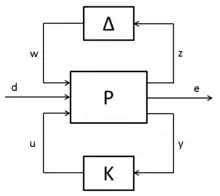
Nach der Definition der Unsicherheiten und vor der Anwendung der -Algorithmen zur Reglersynthese muss zunächst das Systemmodell zusammen mit den Unsicherheiten in die LFR überführt werden. Bei der LFR werden den Zustandsgleichungen virtuelle Ein- und Ausgänge hinzugefügt, um die unbekannten Unsicherheitswerte zu eliminieren bzw. von den bekannten Werten zu trennen. Am Ende steht das folgende LFR-System mit der Reglermatrix (untere LFR) und der Unsicherheitsmatrix (obere LFR), siehe rechte Abbildung. Dabei sind:



- hinzugefügte virtuelle Ein- und Ausgänge
- äußere Störung, gewichteter virtueller Fehler
- Stell- und Rückführvektor
- Reglermatrix




Beispiel
Die Dämpfung eines -Gliedes sei unsicher:

- mit



Zur Eliminierung von wurde der virtuelle Eingang hinzugefügt. Dazu passend wird der Ausgang hinzugefügt, wodurch die Rückführung geschlossen werden kann und trotz Eliminierung kein Informationsverlust entsteht.



Aus dem unsicheren System

wird das erweiterte System (auch bzw. ):




Bei dynamischen Unsicherheiten ist das Verfahren analog. Bei mehreren Unsicherheiten entsteht eine Diagonalmatrix mit den Unsicherheitswerten (skalar und/oder frequenzabhängig) auf der Diagonalen. Die unbekannten Unsicherheitswerte sind nun in upper-LFR-Struktur von der Strecke getrennt, siehe obere Abbildung. Können sie nicht beziffert werden, so müssen sie beim Reglerentwurf vernachlässigt werden, was zumeist der Fall ist.
H∞- Reglersynthese
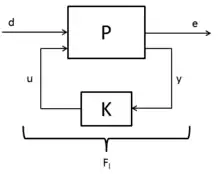
In lower-LFR-Darstellung stellt sich die erweiterte Strecke mit der Reglermatrix wie in der rechten Abbildung dar. Das Ziel des Entwurfs ist die Minimierung der Energieübertragung von auf bzw. die Erreichung eines Suboptimums, indem ein Wert unterschritten wird. Mit anderen Worten bedeutet dies, dass äußere Einflüsse möglichst geringe Auswirkungen auf das System haben. Das Minimierungsproblem in der -Norm ausgedrückt lautet also nun:




ist die Übertragungsmatrix von auf und wird auch als Kostenfunktion bezeichnet.

Mit der gegebenen erweiterten Systemmatrix

kann nun das Problem über verschiedene numerische Ansätze gelöst werden, wenn die folgenden Voraussetzungen erfüllt sind:
- ist stabilisierbar, ist beobachtbar
- ist stabilisierbar, ist beobachtbar






Die zwei gebräuchlichsten Möglichkeiten zur Lösung des Optimierungsproblems sind zum einen das LMI-Verfahren (Lineare Matrix Ungleichung) und zum anderen die Lösung von zwei algebraischen Matrix-Riccati-Gleichungen. Der Ablauf von letzterem soll kurz gezeigt werden, die Lösung ist nur numerisch möglich. Die Auslegung kann iterativ wiederholt werden, um ein möglichst kleines zu erreichen. Der entstehende Regler besitzt dieselbe Anzahl an Zuständen wie das erweiterte System .
Zur Lösung der zwei Riccati-Gleichungen muss gelten (alle Großbuchstaben sind Matrizen):
- Es existiert ein , sodass
- Es existiert ein , sodass
- Der größte Eigenwert des gefundenen bzw. ist kleiner als :






Mit den gefundenen Matrizen und synthetisiert sich die Reglermatrix schlussendlich zu .

Dabei sind:
- ,
- ,
- ,




Siehe auch
Literatur
- Sigurd Skogestad, Ian Postlethwaite: Multivariable Feedback Control: Analysis and Design. Wiley, New York 2005, ISBN 0-470-01167-X.
- Huibert Kwakernaak: Robust Control and H∞-Optimization-Tutorial. (PDF; 1,5 MB) Pergamon Press, 1992.
- Keith Glover, John Doyle: State-space formulae for all stabilizing controllers that satisfy an H∞-norm bound and relations to risk sensitivity. (PDF; 531 kB) In: System & Control Letters. 11, 1988, S. 167–172.