Geometrische Stetigkeit
Geometrische Stetigkeit ist ein Begriff aus dem Gebiet geometrische Modellierung und beschreibt die Güte des Kontaktes zweier ebener Kurven bzw. Flächen in einem gemeinsamen Punkt ohne Berücksichtigung der zufällig gewählten (parametrisierten oder impliziten oder expliziten) Darstellung der Kurven bzw. Flächen.
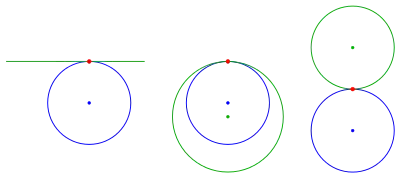


(links: Kurven , rechts: Ellipse mit Scheitelkrümmungskreise)

- -Stetigkeit zwischen
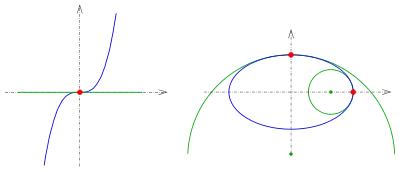
- - zwei Kurven in einem gemeinsamen Punkt bedeutet, dass beide Kurven in dieselbe Tangente besitzen (siehe 1. Bild).
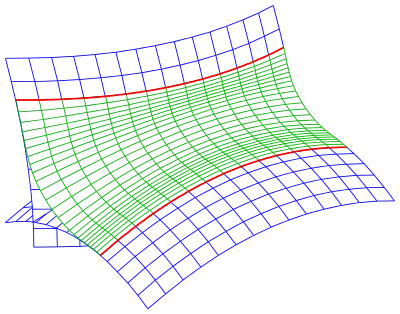
- - zwei Flächen in einem gemeinsamen Punkt bedeutet, dass beide Flächen im Punkt dieselbe Tangentialebene besitzen.

- -Stetigkeit zwischen
- - zwei Kurven in einem gemeinsamen Punkt bedeutet, dass beide Kurven in dieselbe Tangente und dieselbe (orientierte) Krümmung besitzen (siehe 2. Bild).
- - zwei Flächen in einem gemeinsamen Punkt bedeutet, dass beide Flächen in dieselbe Tangentialebene und dieselben Normalkrümmungen besitzen.
Es lässt sich allgemein die -Stetigkeit definieren. Dabei bedeutet -Stetigkeit, dass beide Kurven/Flächen nur Kontakt in dem betreffenden Punkt haben. In der Praxis spielen - und -stetige Kurven/Flächen die wichtigste Rolle. Beispielsweise sollte beim Übergang einer geraden Straße in eine kreisbogenförmige Straße der Übergang natürlich mindestens tangential () erfolgen. Geht die Straße tangential direkt in den Kreis über, muss der Fahrer beim Übergang aber ruckartig das Lenkrad von der Geradeaus-Stellung auf die Kreisbewegung verändern. Um dies harmonischer zu gestalten, wird der Übergang zwischen Gerade und Kreis durch eine Übergangskurve, die -kontakt sowohl zur Gerade als auch zum Kreis hat, übernommen. Dies ist nicht mit einem Teil eines Kegelschnitts (Kurven zweiten Grades) zu erreichen. Man muss hierfür mindestens eine Kurve 3-ten Grades (parametrisiert oder implizit) verwenden. Ein Beispiel für die Notwendigkeit von -Kontakten zwischen Flächen stammt aus der Autoindustrie. Eine Karosserie wird in der Regel aus mehreren Teilstücken zusammengesetzt. Erfolgt diese Zusammensetzung nur mit Tangentialkontakt (), so erhalten Spiegelbilder von Objekten an diesen Stellen einen Knick, was unvorteilhaft aussieht. Dies lässt sich mit -stetigen Übergängen vermeiden.


Bemerkung zu den Bildern: Die Bilder zeigen jeweils eigenständige Kurven mit einem gemeinsamen Punkt, in dem die Kurven sich berühren. In der Praxis wird ein Teil der einen Kurve am Berührpunkt durch die zweite Kurve fortgesetzt. Analoges gilt auch für Flächen.
Ebene Kurven
Um ebene Kurven auf geometrische Stetigkeit (Kontakt) untersuchen zu können, sind Kenntnisse aus der elementaren Differentialgeometrie nötig.
Darstellungen von Kurven
Eine ebene Kurve wird in der Regel als Bild eines reellen Intervalls bezüglich einer stetigen Funktion erklärt. Diese Definition liefert eine


- Parameterdarstellung .

Ist die Funktion n-mal stetig differenzierbar, so heißt die Kurve -stetig oder Kurve der Klasse .

- Eine -Kurve heißt regulär, wenn in jedem Punkt der Tangentenvektor ist.


Beispiele:
- ist der Kreis mit Radius 2 und Mittelpunkt im Nullpunkt. Da gilt, ist diese Darstellung regulär.
- ist ein Teil der Normalparabel . Da ist die Darstellung regulär.
- ist ein Teil der Normalparabel . Da ist für , ist die Darstellung nicht regulär.








Im Sonderfall lässt sich die Kurve als Graph der Funktion darstellen. Eine solche Darstellung nennt man explizit und schreibt , wobei ist:




- explizite Darstellung .
Ist eine -Funktion, so ist diese Darstellung immer regulär.

Beispiele:
- ist der obere Halbkreis mit Radius 2 und Mittelpunkt im Nullpunkt. Der ganze Kreis lässt sich nicht explizit darstellen.
- ist ein Teil der Normalparabel.


Eine dritte, wesentliche Darstellung einer ebenen Kurve ist die implizite Darstellung. Dabei wird die Kurve als Teil der Lösungsmenge einer Gleichung aufgefasst. Die Rechtfertigung hierfür liefert der Satz von der impliziten Funktion. Er besagt, dass unter gewissen Voraussetzungen eine Gleichung lokal nach y oder x aufgelöst werden kann, d. h., es existiert lokal eine explizite Darstellung.

- implizite Darstellung .
Eine implizite Darstellung einer Kurve ist regulär, wenn in jedem Punkt der Kurve differenzierbar ist und gilt.


Beispiele:
- beschreibt implizit den Kreis mit Radius 2 und Mittelpunkt im Nullpunkt.
- beschreibt implizit den Kreis mit Radius 2 und Mittelpunkt im Nullpunkt.
- beschreibt implizit die Normalparabel.



Eine ebene Kurve lässt sich also mit Hilfe verschiedener Darstellungen beschreiben.
Für das Zusammensetzen von Kurven (geometrisches Modellieren) spielen nur die geometrischen Eigenschaften Tangente, Krümmung, … eine Rolle. Also benötigt man hierfür geeignete Formeln.
Tangente einer ebenen Kurve
Die Tangente in einem Kurvenpunkt kann parametrisiert dargestellt werden durch

- mit einem geeigneten Richtungsvektor .


Ein Richtungsvektor einer in einem Punkt einer
- parametrisierten regulären Kurve ist ,
- expliziten Kurve ist ,
- impliziten Kurve ist .




Krümmung einer ebenen Kurve
Die Krümmung einer ebenen Kurve gibt an wie schnell sich die Einheitstangente entlang der Kurve verändert. Bei einer Gerade ist die Krümmung , bei einem Kreis mit Radius r ist die Krümmung . Bei einer ebenen Kurve gibt es nur zwei mögliche Richtungen, in denen sich eine Kurve krümmen kann: links oder rechts. Der Betrag der Krümmung



- einer parametrisierten Kurve ist ,


- einer expliziten Kurve ist ,

- einer impliziten Kurve ist

Cn-Kontakt ebener Kurven
Definition: Zwei reguläre ebene parametrisierte Kurven haben -Kontakt in einem gemeinsamen Punkt , falls die Ableitungen der Funktionen bis zur Ordnung n im Punkt übereinstimmen.



Analog definiert man den -Kontakt von zwei expliziten bzw. impliziten Kurven.
Gn-Kontakt ebener Kurven
Definition: Zwei reguläre parametrisierte oder explizite oder implizite ebene Kurven haben -Kontakt in einem gemeinsamen Punkt , falls es lokal für beide Kurven reguläre parametrisierte (oder explizite oder implizite) Darstellungen gibt, die -Kontakt in haben.
- Im Fall von -Kontakt genügt der Nachweis, dass die beiden Kurven parallele Tangentenvektoren in besitzen. Denn dann existiert für jede Kurve eine Bogenlängen-Parametrisierung bzw. mit -Kontakt in .



- Im Fall von -Kontakt genügt der Nachweis, dass die beiden Kurven parallele Tangentenvektoren und dieselben (orientierten) Krümmungen in besitzen. Denn dann existiert für jede Kurve eine Bogenlängen-Parametrisierung bzw. mit -Kontakt in . Die Vektoren sind normierte zu bzw. senkrechte Vektoren.







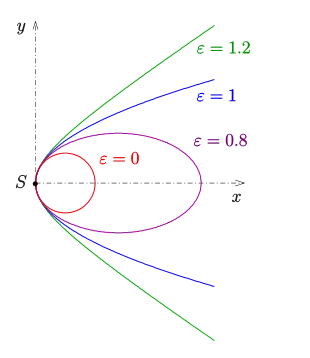

Beispiel: Die Gleichungen mit festem Parameter und Scharparameter beschreiben implizit eine Kegelschnittschar mit dem gemeinsamen Punkt (s. Bild). Um festzustellen, ob die Kegelschnitte -Kontakt im Nullpunkt haben, bilden wir die partiellen Ableitungen:



- .

Im Nullpunkt gilt:
- .

Da von abhängt, haben die Kurven keinen -Kontakt.

Berechnet man nach obiger Formel die Krümmung, erhält man . Also ist unabhängig vom Scharparameter . Damit besitzen je zwei Kegelschnitte dieser Schar im Nullpunkt -Kontakt.

Bemerkung: -Kontakt lässt sich analog auch für Raumkurven definieren.[1]
Gn-Kontakt von Flächen
-Kontakt lässt sich formal analog für Flächen definieren. Die Krümmung wird im Flächenfall durch die Normalkrümmungen ersetzt.[2]
Bemerkung: Das Zusammensetzen von Kurven/Flächen mit -Kontakt ist relativ einfach. Kurven mit -Kontakt zu modellieren ist etwas schwieriger. Ziemlich schwer ist es, Flächen mit -Kontakt herzustellen.[3] In der vorwiegend englischsprachigen Literatur findet man die Erzeugung -stetiger Kurven und Flächen unter dem Titel blending curves and surfaces.
Siehe auch
Literatur
- Gerald E. Farin: Kurven und Flächen im Computer Aided Geometric Design, Vieweg-Verlag 1994, ISBN 3-528-16542-1, Seite 155, 272
- Gerald E. Farin, Josef Hoschek, Myung-Soo Kim (Hrsg.): Handbook of Computer Aided Geometric Design. Elsevier Science & Technology, 2002, ISBN 0-444-51104-0, S. 193 (eingeschränkte Vorschau in der Google-Buchsuche).
- Josef Hoschek: Grundlagen der geometrischen Datenverarbeitung, B.G. Teubner-Verlag 1989, ISBN 3-519-02962-6, Seite 185, 277
Einzelnachweise
- Geometry and Algorithms …, op. cit., Seite 55
- Geometry and Algorithms …, op. cit., Seite 55
- Geometry and Algorithms …, op. cit., Seite 119