ARINC 429
ARINC 429 ist ein in den 1970ern entwickelter und in den 1980ern eingeführter Datenbus-Standard für Verkehrsflugzeuge. Es wird zwischen einem Highspeed- und einem Lowspeed-Bus unterschieden. Bei einem Highspeed-Bus beträgt die maximale Datenübertragungsrate 100 kbit/s, bei Lowspeed 12,5 kbit/s.
Es existieren noch weitere Protokolle nach dem ARINC-Standard. ARINC 429 findet sich in einer Light-Variante auch in Geschäfts- und Sportflugzeugen wieder. In der militärischen Luftfahrt und der Raumfahrt wird statt des ARINC-Busses vorzugsweise der MIL-STD-1553-Bus verwendet.
Allgemeines
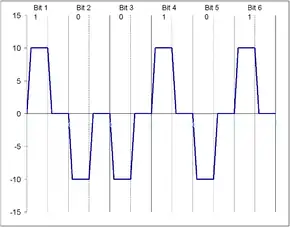
Prinzipiell ist die Serielle Schnittstelle ARINC-429 mit der differentiellen EIA-422 Schnittstelle vergleichbar. Nur sind statt zwei verschiedener Pegel drei definiert worden (+10 V, 0 V und −10 V). Wie einzelne Bits übertragen werden, sieht man bei der Darstellung des resultierenden Differenzsignals (ARINC-429-Timing).
Kennzeichnend für jedes Bit ist, dass der Pegel für die Hälfte der Zeit die Spannung ±10 V hat und dann in der anderen Hälfte 0 V (RZ-Code). Es stehen also zu jedem Bit Synchronisationsinformationen zur Verfügung. Eine asynchrone Schnittstelle z. B. RS-232 benötigt zum Vergleich für jedes Datenwort ein Start- und Stoppbit.
Die Kommunikation ist eine 1-zu-n-Verbindung (ein Sender, n Empfänger). Aufgrund des hohen Spannungspegels gelten die gleichen Einschränkungen bzgl. Leitungslänge und Übertragungsrate wie bei RS-232 und RS-422. Daher sind auch recht moderate Übertragungsraten von entweder 12,5…14,5 oder 100 Kilobits/Sekunde definiert. Bei der Low-Speed-Betriebsart gelten Toleranzen von 10 % und bei der High-Speed-Betriebsart Toleranzen von 5 % bei der Übertragungsrate.
Um möglichst keine Störsignale durch die Übertragung zu erzeugen, gibt es eine sog. slope control. Das bedeutet, dass die Anstiegs- und Abfallflanken entsprechend der Übertragungsrate möglichst flach verlaufen. Da es kein Startbit gibt, erfolgt die Anfangserkennung eines 32 Bit-Datenwortes über eine Pause von mind. 4 Bits, in denen kein Signal anliegt (Sync gap: minimum 4 bits). Innerhalb der 32 Datenbits ist nur ein Gap von max. 2 Bitperioden erlaubt. Und am Ende des Datenwortes ist wieder ein Gap von mind. 4 Bitperioden definiert.
Rahmenaufbau
Datenübertragung im ARINC 429 erfolgen grundsätzlich in einem fixen Rahmen mit einer fixen Länge von 32 Bit. Die Übertragung jedes Rahmen beginnt mit Bit 1 und endet mit Bit 32, die Beschreibung im Standard folgt allerdings immer der Richtung von Bit 32 zu Bit 1, also in umgekehrter Richtung wie die einzelnen Bits physisch übertragen werden. Jeder Rahmen ist in fünf Bereiche unterteilt, die fix bestimmten Bitpositionen im Rahmen zugeordnet sind. Dies sind:
- Bit 32: Paritätsbit über den gesamten Rahmen
- Bits 31 bis 30 stellen die Sign/Status Matrix (SSM) des Rahmens dar. Darin werden bestimmte Zustände allgemein codiert:
- Normal Operation (NO) – zeigt an, dass die Daten im Datenfeld als korrekt angenommen werden.
- Functional Test (FT) – zeigt an, dass die Daten im Datenfeld zu Testzwecken übertragen werden.
- Failure Warning (FW) – zeigt an, dass die Daten im Datenfeld wegen einer Fehlfunktion als nicht zuverlässig eingeschätzt werden oder überhaupt fehlen.
- No Computed Data (NCD) – zeigt an, dass die Daten im Datenfeld aus anderen Gründen als einer Fehlfunktion als ungenau oder als fraglich bewertet werden. Beispielsweise werden Kommandos oder Meldungen von dem Autopiloten als NCD markiert, wenn der Autopilot nicht aktiviert ist.
- Bits 29 bis 11 ist das eigentliche Datenfeld im Rahmen. Es kann Bitfelder, Zahlen im BCD-Code oder als Zweierkomplement oder als eine Kombination daraus enthalten. Die Bedeutung und Form richtet sich nach dem unten angeführten Label.
- Bits 10 bis 9 sind die Source/Destination Identifiers (SDI) und drücken entweder das gewünschte Empfangsmodul oder das Sendemodul des Rahmens aus.
- Bits 8 bis 1 stellen das Label dar, welche den Datentyp im Datenfeld beschreibt. Die verschiedenen und möglichen Labels sind im Standard tabellarisch definiert.
Literatur
- Cary R. Spitzer, Uma Ferrell, Thomas Ferrell (Hrsg.): Digital Avionics Handbook. 3. Auflage. CRC Press, 2015, ISBN 978-1-4398-6861-4, Kapitel 34.