MIL-STD-1553
MIL-STD-1553 (kurz MIL-Bus) ist ein Feldbus, den die US-Luftwaffe 1973 einführte.
Eigenschaften
Daten werden seriell mit einer Geschwindigkeit von bis zu 1 Mbit/s übertragen. Übertragene Wörter bestehen aus 20 Bit: 16 Bit für die Information, drei vorangestellte Bit für die Synchronisation und ein nachgestelltes Kontrollbit für die (ungerade) Parität. Sie werden im Halbduplex-Betrieb übertragen und gehören entweder der Kategorie Daten, Command oder Status an.
Die Abkürzung MIL steht für military und STD für standard. Der MIL-Bus ist im militärischen Flugzeugbau und in der Raumfahrt zur Ansteuerung der Systemkomponenten weit verbreitet, während sich im Automobilbau der CAN-Bus etabliert hat. So ist der MIL-Bus in der Ariane 5, der ISS zu finden und war in den Space Shuttles im Einsatz. Allerdings setzt sich in der Raumfahrt für hohe Datenraten der SpaceWire durch. Die zivile Luftfahrt setzt hingegen ARINC-Busse ein, vorwiegend den ARINC-429-Bus, der heute in den meisten kommerziellen Flugzeugmodellen zu finden ist.
Struktur
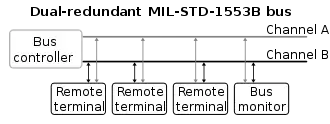
Die MIL-STD-1553-Struktur besteht aus einem Bus Controller (BC) und bis zu 31 Remote Terminals (RT).
Busteilnehmer:
- Der Bus Controller organisiert den Datenfluss auf dem Feldbus. Der BC stellt im System einen eigenständigen Computer im Flugzeug dar.
- Jedes Remote Terminal stellt eine Schnittstelle für ein Gerät im Flugzeug dar. Über diese Schnittstelle kann das Gerät am Bus teilnehmen.
- Der Bus Monitor ist eine Testeinrichtung, mit der der Bus überwacht wird. Diese Testeinrichtung kann alle Daten auf dem Bus aufzeichnen oder direkt zur Laufzeit wiedergeben, wodurch Fehler in der Übertragung aufgespürt werden können.
Kommunikationsablauf
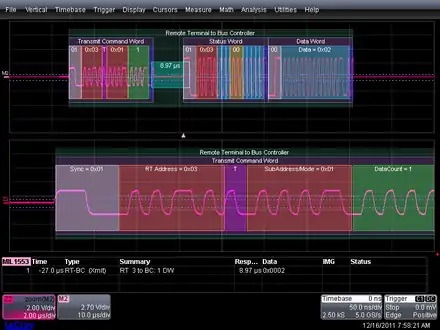
Grundsätzlich gibt es drei verschiedene Kommunikationsrichtungen. BC zu RT, RT zu BC und RT zu RT. Zusätzlich wird eine Broadcast-Funktionalität unterstützt, bei der ein Busteilnehmer (BC oder RT) an alle anderen angeschlossenen RTs sendet. Jede Kommunikation über den Bus – sowohl BC zu RT, RT zu BC als auch RT zu RT – wird durch den Bus Controller eingeleitet.
Elektrischer Aufbau
Um die Störsicherheit zu erhöhen, sind die Systemkomponenten galvanisch vom Netz getrennt. Im einfachsten Fall koppelt ein induktiver Übertrager das Signal ein. Dies ist möglich, da die Signalpegel aufgrund der Manchestercodierung gleichspannungsfrei sind. Zum Einkoppeln gibt es verschiedene Möglichkeiten: Transformer Coupled oder Direct Coupled. Transformer Coupled bedeutet, dass der Bus mit einem Widerstandsnetzwerk zum Transformator abgeschlossen ist. „Direkt“ bedeutet, dass der RT oder BC mit Widerständen zu seiner Transformatorseite abgeschlossen ist, es befinden sich keine Widerstände im Bus, deshalb auch Direkt.
Es gibt dabei einen Primär- und ein Sekundärkanal (diese sind redundant, es darf also nie gleichzeitig auf dem Primär- und Sekundärkanal gesendet werden). Jeder Kanal verfügt über zwei Signalleitungen, auf denen die Daten übertragen werden: Signal eins („true“) und Signal zwei, als dessen Komplement. Die Signale werden differenziell gemessen, was eine geringere Störanfälligkeit zur Folge hat. Es handelt sich dabei um eine symmetrische Signalübertragung oder genauer um eine „differentielle Übertragung.“
Weblinks
- MIL-STD-1553B. (PDF, 422 kB) 21. September 1978 (auf den Seiten von Ballard Technology).
- MIL-HDBK-1553A. (PDF, 6,46 MB) 1. November 1988 (auf den Seiten von Ballard Technology).
- MIL-STD-1553-Handbuch der AIM GmbH als PDF (703 kB)