Unterwasserstation
Eine Unterwasserstation bzw. ein Unterwasserlabor (kurz UWL), auch Unterwasserhabitat, ist eine Tauch- und Arbeitsstation unter Wasser, die in der Regel auf dem Meeresboden für Forschungszwecke wie meereskundliche Aufgaben dauerhaft oder für einen längeren Zeitraum errichtet wird.
%252C_by_Klugschnacker_in_Wikipedia_(20).JPG.webp)
In den 1960er und 70er Jahren dienten Unterwasserstationen der Erforschung insbesondere der Offshore-Tauchtechnik und des Sättigungstauchens, auch wurden neue Erkenntnisse in der Zoologie gewonnen. Die Stationen verblieben während des Forschungsauftrages in der festgelegten Tiefe, die Versorgung war über Schiffe oder von Land sichergestellt.
Entsprechend der Aquanautik, dem Forschungsbereich der Meereskunde, der sich mit der Stationierung von Menschen unter Wasser beschäftigt, nennt man Besatzungsmitglieder einer Unterwasserstation Aquanauten.[1]
Geschichte
Die frühe Geschichte von Unterwasserstationen ist identisch mit der von Taucherglocken und Senkkästen. Da außerdem lange Aufenthalte in Umgebungen mit erhöhtem Druck (hyperbare Umgebungen) notwendigerweise mit einer Sättigung des Körpers mit dem umgebenden Gas einhergeht, ist sie ebenfalls eng mit der Entwicklung des Sättigungstauchens verbunden.
Die zündende Inspiration, die zum Bau vieler verschiedener Unterwasserstationen führte, kam von George F. Bond, der zwischen 1957 und 1963 in seinem Projekt Genesis in fünf Phasen die medizinischen Auswirkungen von Organismen in gesättigtem Zustand erforschte.
Durch diese Experimente motiviert, begann Edwin A. Link das Programm Man-in-the-Sea noch bevor George F. Bond die Experimente mit Menschen 1962 durchführte. Dazu entwickelte er eine Tauchkammer, in der er diverse Versuche vornahm, bevor unter der Bezeichnung Man-in-the-Sea I Robert Sténuit knapp über 24 Stunden auf einer Tiefe von 61 m verbrachte.[1]
Ebenfalls durch die Ergebnisse von George F. Bond motiviert, fand 1962 in Frankreich Jacques-Yves Cousteaus erstes Conshelf-Projekt auf einer Tiefe von 10 m statt. Dabei verbrachten zwei Taucher eine Woche in einem waagerechten Stahlzylinder.
Nun wurden die Projekte anspruchsvoller. 1963 folgte Cousteaus Conshelf-II-Projekt. Im Vordergrund stand dabei nicht nur der technische Erkenntnisgewinn, sondern auch die Absicht, anstelle eines reinen Schutzraumes ein wohnliche Umgebung zu schaffen. Auf 11 m Tiefe lebten fünf Personen für vier Wochen, zwei weitere eine Woche auf 25 m Tiefe.[2]
Im Juni 1964 verbrachten Robert Sténuit und Jon Lindbergh 49 Stunden auf einer Tiefe von 126 m in Edwin A. Links Man-in-the-Sea II-Programm. Das Habitat bestand dabei aus einem elastischen Ballon namens SPID. Analog zum Wettlauf zum Mond begann nun ein Wettrennen um die Führung bei der Stationierung von Menschen auf dem Meeresboden. Die Anlagen wurden größer und man erweiterte die Einsatztiefe.
Es folgte eine Reihe von anspruchsvollen Unterwasserstationen, in denen sich Menschen für mehrere Wochen und in großen Tiefen aufhielten. Mit Sealab II entstand das bisher größte Habitat mit einer Nutzfläche von 63 m², das auf einer Tiefe von über 60 m eingesetzt wurde. Mehrere Länder bauten fast zeitgleich eigene Stationen und begannen Experimente meist in flachen Gewässern, während immer neue Rekorde gebrochen wurden. So wohnten in Conshelf III sechs Aquanauten für mehrere Wochen auf einer Tiefe von 100 m. In Deutschland wurde mit dem UWL Helgoland das erste Habitat für den Betrieb in kalten Gewässern gebaut, die Tektite-Stationen waren geräumiger und technisch ausgereifter. Das wohl ambitionierteste Projekt war Sealab III, ein Umbau von Sealab II, das nun auf 186 m betrieben werden sollte. Als einer der Taucher noch in der Vorbereitungsphase durch menschliches Versagen tödlich verunglückte, wurden alle weiteren Projekte der U.S. Marine beendet. Ein französisches Tauchunternehmen war das im September 1970 durchgeführte Janus II, bei dem drei Aquanauten acht Tage im Golf von Ajaccio in 255 Metern Tiefe verbrachten, ein neuer Spitzenwert, da bis zu diesem Zeitpunkt noch niemand derart lange unter einer so hohen Wassersäule gearbeitet hatte.
International ist zu bemerken, dass alle begonnenen Groß-Projekte bis auf das La Chalupa-Habitat durchgeführt, aber nicht mehr fortgesetzt wurden, so dass die folgenden Habitate kleiner und für geringere Tiefen ausgelegt waren. Das Rennen um größere Tiefen, längere Missionen und technische Weiterentwicklungen schien somit ein Ende gefunden zu haben.
Auch aus Gründen wie fehlende Mobilität, nicht zu gewährleistende Autarkie, Verlagerung des Schwerpunkts auf Raumfahrt und/oder Übergang zu oberflächenbasierten Ölplattformen sank das Interesse an Unterwasserstationen, so dass nach 1970 eine spürbare Abnahme an großen Projekten auftrat. Mitte der achtziger Jahre entstand noch das Habitat Aquarius im Stil von Sealab und Helgoland und ist noch heute in Betrieb. Die erste Generation von Unterwasserstationen endete mit ihm.
Folgendes Zitat der Cousteau Society drückt stellvertretend das Ergebnis der gesamten ersten Generation von Unterwasserstationen aus:
„Conshelf proved that human beings can live under the sea for long periods of time but that, even though they have the physical and psychological capabilities, humans are not made to exist in a world without sun.“
„Conshelf bewies, dass Menschen für längere Zeiträume am Meeresboden leben können, jedoch, obwohl sie die physische und psychische Kapazität dazu haben, nicht dazu geschaffen sind, in einer Welt ohne Sonne zu existieren.“[2]
Es folgten Projekte, die das Erleben in den Vordergrund rückten. So entstanden futuristische Konzepte für Unterwasserdörfer und -Luxushotels (Village Sous-Marin, Hydropolis, Poseidon Resort). Man entdeckte die Unterwasserwelt auch als Plattform für Fernseh-Spielshows (Progetto Abissi), baute Unterwasser-Observatorien (Coral World/Eilat) und -Restaurants, die per Korridor von der Wasseroberfläche erreichbar waren (Red Sea Star, Ithaa) oder Forschungsstationen, die an der Wasseroberfläche treiben und über einen Unterwasserbereich verfügen sollten (SeaOrbiter).
Die meisten dieser neuen Großprojekte wie Hydropolis, Poseidon Resort und SeaOrbiter wurden bisher nicht umgesetzt, obwohl der Architekt sowohl von SeaOrbiter, Jacques Rougerie, als auch der von Poseidon Undersea Resort, L. Bruce Jones, für die erfolgreiche Realisierung von unterseeischen Großprojekten bekannt sind. Sie zeigen jedoch klar, in welche Richtung sich zukünftige Projekte entwickeln.
2018 schlug Martin Henke, Gründer von CalamarPark, einer "Initiative für Studien zur Aquanautik"[3], auf der 21. Konferenz für Unterwasser-Forschung und -Technologie analog zur ISS den Bau einer Internationalen Unterwasserstation vor[4], dessen Konzept 2020 bei der ESA eingereicht wurde.[5]
Fabien Cousteau, Enkel von Jacques-Yves Cousteau, nahm 2020 die Idee einer Internationalen Unterwasserstation auf und stellte seine Vision einer Unterwasser-Forschungsstation vor, das eines Tages viermal so groß wie alle bisherigen Unterwasser-Habitate sein soll. Die Installierung soll zu einem unbestimmten Zeitpunkt vor der Küste von Curaçao stattfinden.[6]
Technische Grundlagen
Typen
Aus der Liste der bisherigen Unterwasserstationen ableitend, können Unterwasserstationen je nach geplanter Tiefe und Mobilität in verschiedene Typen unterteilt werden. Dadurch wird ersichtlich, dass sich Unterwasserstationen konzeptionell nicht immer klar von Tauchbooten, Taucherglocken oder Schiffen unterscheiden lassen. Ein auf dem Meeresboden absetzbares und mit Ausstiegsschleusen versehenes Tauchboot kann somit durchaus als Unterwasserstation kategorisiert werden. Ebenso verhält es sich mit Taucherglocken, die über einen Trockenbereich verfügen und den Tauchern erlauben, komplett aufzutauchen; oder Schiffe, die über einen Bereich im Rumpf verfügen, dessen Druck an die Umgebung angepasst werden kann und es Tauchern erlaubt, über Schleusen Ausstiege vorzunehmen. Zu diesem Dilemma schrieb G. Haux 1970:
„An dieser Stelle muß auch noch gesagt werden, daß es nicht ganz einfach ist, den Begriff ‚Unterwasserlabor‘ scharf einzugrenzen. Man könnte sich darüber streiten, ob man die Tauchkammer von Link, die im ‚Man-in-Sea-I‘-Projekt zum Einsatz kam, als UWL bezeichnen darf. Aber auch die von den Sowjets geplante ‚Bentos-300‘ ist, da sie eine gewisse Eigenmanövrierfähigkeit besitzt, nicht so ohne weiteres zu klassifizieren. Deshalb besteht durchaus die Möglichkeit, dass dieser Tauchkörper an anderer Stelle als Tauchboot eingeordnet wird. Nun – eine gewisse Großzügigkeit kann hier nicht schaden.“[7]
Die wichtigsten Unterscheidungen sind wie folgt:
 Schwimmend | Schwimmend
Die eigentliche Station befindet sich im Rumpf einer schwimmenden Struktur und somit ständig unter der Wasseroberfläche. Im Beispiel Sea Orbiter soll dieser Bereich bis zu einer Tiefe von 30 m reichen. Vorteil dieses Typs ist die Mobilität. |
 per Korridor | Per Oberflächenkorridor
Die Station ist über einen Korridor zur Wasseroberfläche erreichbar. Dadurch ist die Einsatztiefe sehr begrenzt. Es kann jedoch der Innendruck von 1 bar aufrechterhalten werden, so dass Besucher keinerlei Dekompression-Prozeduren absolvieren müssen. Dieser Typ wird generell an Küsten eingesetzt wie z. B. das Unterwasser-Restaurant Ithaa auf den Malediven oder Red Sea Star in Eilat/Israel. Ausstiege sind dabei nicht vorgesehen, bzw. nur durch eine Schleuse durchführbar. Außerdem kann diese Bauweise zu massiven Problemen führen, wie z. B. bei Ithaa, als nach dem Sumatra-Andamanen-Beben 2004 ein Tsunami den Korridor zu überfluten drohte. |
 Halb-Autark | Halb-Autark
Stationen dieses Typs sind nur per Tauchgang erreichbar, beziehen Energie und Atemgas jedoch durch eine Versorgungsleitung (engl. umbilical = Nabelschnur). Die meisten Stationen sind von diesem Typ, wie z. B. Aquarius (Labor), Sealab I und II und Helgoland |
 Autark | Autark
Die Station verfügt über eigene Reserven an Energie und Atemgas und ist durch ihre Autarkie zwangsläufig dazu in der Lage, (zumindest in vertikale Richtung) selbst zu manövrieren. Dieser Typ ist also Tauchbooten oder Panzertauchanzügen ähnlich, umgeht durch seine Ausstiegsmöglichkeit jedoch die „vollständige Trennung von der Umgebung“ (complete environmental separation[8]). Beispiele dafür sind Conshelf III oder Bentos-300 |
Die zwei Innendrucktypen: Umgebungsdruck gegen Oberflächendruck
Bezüglich des Innendrucks lassen sich zwei Arten von Unterwasserstationen unterscheiden:
- Offene Station: Fast alle Unterwasserstationen sind so eingerichtet, dass in Ihnen Umgebungsdruck herrscht bzw. leicht darüber, was dem Prinzip einer Taucherglocke entspricht. Die Anlage hat einen Ausgang (siehe Moonpool) an der Unterseite, durch den Taucher ein- und aussteigen können. Sobald die Aquanauten mit dem Atemgas gesättigt sind (siehe Sättigungstauchen), können sie sich unbegrenzt in der Station aufhalten. Am Ende einer Mission besteht dann die Notwendigkeit einer je nach Einsatztiefe beträchtlichen Dekompressions-Prozedur. Zu diesem Zweck werden die Taucher entweder mit einer Kapsel zu einer Dekompressionskammer an Bord eines Versorgungsschiffes transportiert (siehe Sealab II), oder die Station wird unter Wasser versiegelt und dient selbst als Dekompressionskammer (siehe Aquarius). Letzteres ist nur bis zu Tiefen von etwa 40 m möglich.
- Geschlossene Station: Der Innendruck bei geschlossenen Stationen ist wie bei einem U-Boot identisch mit dem Luftdruck auf Meereshöhe. Zum Ausstieg müssen Taucher eine Schleuse benutzen, die sie auf den Umgebungsdruck der jeweiligen Tiefe komprimiert und später wieder dekomprimiert. Während die Einsatztiefe von der Druckfestigkeit der Station abhängt, können Ausstiege nur in begrenzten Tiefen vorgenommen werden, da in größeren Tiefen selbst kurze Ausstiege beträchtliche Dekompressions-Zeiten notwendig machen würden. Die russische Station Bentos-300 (sprich: Bentos Minus Dreihundert) war für Tiefen von bis zu 300 m konzipiert und verfügte über eine solche Schleuse für Ausstiege.
Das Drei-Kammer-System
Während man in den Experimenten Man-in-the-Sea I, Conshelf I, II und III das Habitat zugleich auch als Dekompressionskammer benutzte, wurden die beiden Funktionen schon im Man-in-the-Sea II-Experiment physisch voneinander getrennt. Nach dem Aufenthalt im Habitat stiegen die Taucher in eine Transportkapsel um, in der sie auch gleichzeitig dekomprimierten. Seit den Sealab-Projekten nutzt man das Drei-Kammer-System, bei dem die Taucher nach ihrem Aufenthalt im Habitat in eine Personentransferkapsel (PTC, engl. personnel transfer capsule) umsteigen, die unter Wasser versiegelt und so an Bord des Versorgungsschiffes gehoben wird. Dort koppelt man es an eine geräumige Deckdekompressionskammer (DDC für deck decompression chamber), in der die teilweise beträchtliche Dekompressionsphase absolviert wird. Die Vorteile sind Mobilität, Wetterunabhängigkeit und bessere medizinische Überwachung.
Die letzte Etappe der Entwicklung ist die Reduzierung von Tieftauchsystemen auf Deckdekompressionskammer und Personentransferkapseln wie in der Draeger Tieftauchanlage Bibby Topaz.[9] Die Taucher wohnen dabei für den gesamten Einsatz unter dem Druck der Einsatztiefe in einem sehr geräumigen Druckkammer-Komplex im Rumpf des entsprechenden Schiffes. Für die einzelnen Taucheinsätze werden sie per Kapsel auf die entsprechende Tiefe gebracht, wo sie aussteigen und die Unterwasserarbeiten absolvieren. Am Ende des Tauchgangs steigen sie zum Transport an die Wasseroberfläche wieder in die Kapsel, die auf dem Schiff an den Druckkammerkomplex gekoppelt wird. Am Ende des mehrere Tage dauernden Einsatzes beginnt die wiederum mehrere Tage lange Dekompressionsphase. Systeme dieser Art werden heute für alle Offshore-Sättigungstauchgänge eingesetzt.[10]
Unterwasserstationen haben sich somit durch ihre eigene Weiterentwicklung selbst abgeschafft.
Komponenten von Unterwasserstationen
- Habitat: Die eigentliche Station
- LSB (engl.: life support buoy, deutsch: Lebenserhaltungs-Boje), die für die Zuleitung von Energie, Atemluft, Süßwasser, Telekommunikation und Telemetrie notwendig ist. Die Verbindung zwischen Habitat und LSB erfolgt über ein mehradriges Umbilical (von umbilical cord, englisch für Nabelschnur), in dem alle Schläuche und Kabel vereint sind.
- PTC (personnel transfer capsule, englisch für Personentransferkapsel): Wird die Dekompression am Ende einer Mission nicht im Habitat durchgeführt (also bei allen Missionen in größerer Tiefe), steigen die Aquanauten in diese Kapsel, die noch auf Einsatztiefe versiegelt wird. Sie wird dann an Deck gehoben und an die Deck-Druckkammer (siehe DDC) gekoppelt, in der die Dekompression absolviert wird.
- DDC (DDC für deck decompression chamber, englisch für Deck-Druckkammer): Diese Kammer befindet sich auf dem Versorgungsschiff und dient sowohl der kontrollierten Kompression vor der Mission, als auch der Dekompression an deren Ende. Der Vorteil einer Druckkammer an Bord ist die Mobilität, die Wetterunabhängigkeit und die bessere medizinische Überwachung.
- Versorgungsschiff (englisch support vessel): Während es bei den ersten Stationen noch zu massiven Problemen durch Seegang bei der Absenkung über die Bordseite kam, zeigte sich später, dass die ideale Form des Versorgungsschiffes die des Katamarans ist, bei dem das Habitat aus der Mitte des Schiffes zu Wasser gelassen werden kann. Um diese Form zu erreichen, wurden bei einigen Stationen zwei Schiffe, durch eine Plattform zur 'U'-Form miteinander verbunden.
- Landstation: Diese Station überwacht alle Vorgänge und beherbergt eine Tauchbasis, technische Ateliers und Unterkünfte.
Ausstiege
Für Ausstiege werden entweder gängige Drucklufttauchgeräte oder lange Schlauchverbindungen zum Habitat benutzt. Die Schlauch-Variante wird im Englischen als Hookah bezeichnet, dem aus dem Hindustani stammenden Begriff für Wasserpfeife.
- Druckluft- oder Kreislauftauchgeräte: Der Vorteil von Drucklufttauchgeräten ist die Mobilität, die für vollständig gesättigte Taucher auch zu einem großen Problem werden kann, wenn er nämlich bei schlechter Sicht den Rückweg zum Habitat nicht mehr findet. Es bestehen dann die zwei Möglichkeiten entweder eines lebensbedrohlichen Dekompressionsunfalls bei dem Versuch, zur Wasseroberfläche zu gelangen, oder der Tod durch Ersticken. Aus diesem Grunde wurden bei den meisten Programmen Markierungen und Seile rund um das Habitat angebracht, um zu vermeiden, dass sich Taucher verirren.
- Hookah-Schläuche sind dementsprechend sicherer, schränken die Bewegungsfreiheit jedoch auch sehr ein und können sich verheddern.[11]
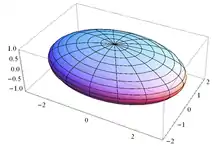
Somit sind die horizontalen Radien der Ausstiege auf die Menge des Luftvorrats oder die Länge des Atemschlauches begrenzt. Aber auch die Entfernungen über und unter das Niveau des Habitats sind beschränkt und richten sich nach der Einsatztiefe und der damit verbundenen Gasdrucksättigung der Taucher. Der für Ausstiege erreichbare Freiraum beschreibt somit die Form eines Ellipsoids rund um das Habitat.
Im Programm Tektite I befand sich das Habitat auf einer Tiefe von 13,1 m. Ausstiege waren vertikal bis auf eine Tiefe von 6,7 m (6,4 m über dem Habitat) bzw. 25,9 m (12,8 m unter dem Habitat-Niveau) begrenzt und wurden horizontal bis auf eine Entfernung von 549 m zum Habitat durchgeführt.[1]
Vorteile
Die Stationierung von Tauchern auf dem Meeresboden hat gegenüber von oberflächenbasierten Tauchgängen diverse Vorteile:
- Beobachtungen können zu jeder Zeit des Tages durchgeführt werden, um damit das Verhalten sowohl von tagaktiven als auch nachtaktiven Organismen zu studieren.[12]
- Unterwasserstationen im flachen Wasser können auch dazu benutzt werden, Taucher aus größeren Tiefen aufzunehmen, um einen Großteil der Dekompression darin durchzuführen. Dieses Prinzip wurde im Projekt Conshelf II genutzt.
- Sättigungstauchgänge bieten die Möglichkeit, mit kurzen Intervallen zu tauchen, was von der Oberfläche nicht möglich ist.
- Risiken in Zusammenhang mit Tauch- und Schiffs-Operationen bei Nacht können minimiert werden. Im Habitat La Chalupa fanden 35 % aller Tauchgänge nachts statt.
- Um die gleiche Menge an Tauchgängen anstelle vom Habitat La Chalupa von der Wasseroberfläche aus durchzuführen, wären täglich acht Stunden Dekompressionszeit notwendig gewesen.[1]
Nachteile
- Umständliche Handhabung
- hoher Personal- und Materialaufwand
- begrenzte Mobilität
- hohe Kosten
Weblinks
Siehe auch
Einzelnachweise
- James W. Miller, Ian G. Koblick: Living & Working in the sea. New York 1984, Van Nostrand Reinhold Company, ISBN 0-442-26084-9.
- Conshelf I, II & III. (Nicht mehr online verfügbar.) Archiviert vom Original am 9. Juni 2014; abgerufen am 2. September 2016 (englisch). Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- CalamarPark: About CalamarPark. In: CalamarPark.com. Abgerufen am 4. November 2020 (englisch).
- Martin Henke: Proposal for a manned underwater habitat program. In: Akdeniz Üniversitesi Yayınları (Hrsg.): Proceedings of SBT 2018 (21st Underwater Science and Technology Meeting, 16-17 Nov. 2018). Nr. 123, 2019, ISBN 978-6-05448355-6, S. 58–62.
- Martin Henke: Lunar Analog European Underwater Research Center. In: ESA Open Space Innovation Platform. ESA, 4. Oktober 2020, abgerufen am 4. November 2020 (englisch).
- Fabien Cousteau Ocean Learning Center: Announcing Fabien Cousteau’s PROTEUS, a RevolutionaryUnderwater Scientific Research Station and Habitat Addressing Humanity’s Most Critical Concerns. Fabien Cousteau Ocean Learning Center, 22. Juli 2020, abgerufen am 4. November 2020 (englisch).
- G. Haux: Tauchtechnik. Band 2. Springer-Verlag, 11. Dezember 2013, S. 277 (Tauchtechnik – Originaltitel: Tauchtechnik. 1970.).
- Sealab I Project Group: Project Sealab Summary Report: An Experimental Eleven-Day Undersea Saturation Dive at 193 Feet. Hrsg.: Office of Naval Research. Dep. of the Navy. ONR Report ACR-108. Washington, D.C. 14. Juni 1965.
- Pressebox: Dräger Safety liefert Tieftauchanlage für norwegisches Taucherbasisschiff „Bibby Topaz“. 23. November 2006, abgerufen am 29. Dezember 2016.
- O. F. Ehm, Max Hahn, Uwe Hoffmann, Jürgen Wenzel: Der neue Ehm – Tauchen noch sicherer. 9. Auflage. Müller Rüschlikon Verlags AG, Cham/Schweiz 2003, ISBN 3-275-01484-6, S. 343.
- Keneth D. Johns: SCIENTIFIC Diver Rebreather Fatality: An Incident Review. Hrsg.: University of North Carolina Wilmington. AAUS_2013_18. Wilmington, North Carolina, USA. (online).
- Bruce B. Collette: Results of the Tektite program: Ecology of coral-reef fishes. Hrsg.: Natural History Museum, Los Angeles County. Los Angeles 1972 (web.archive.org [PDF; 847 kB; abgerufen am 29. August 2021]).