Toyota Partner Robots
Die Toyota Partner Robots sind eine Reihe verschiedener von Toyota gebauten, überwiegend humanoide Robotern, die 2005 auf der Expo vorgestellt wurden.
Roboter

Insgesamt existieren bisher 5 verschiedene Versionen
Übersicht
| Typ | Toyota Walking | Toyota Rolling | Toyota Mountable | wire-operation system |
| Version | 1 | 4 | ||
| Robotertyp | humanoider Roboter |
humanoider Roboter |
ferngesteuerter bipedaler Trans- portroboter |
humanoider Roboter |
| Fortbewegung | bipedal | "Segway- ähnlich" |
bipedal | bipedal |
| Höhe | 120 cm | 100 cm | 180 cm | |
| Masse | 35 kg | 35 kg | 75 kg |
Neben diesen 4 existiert außerdem auch noch mal ein Toyota Partner Robot, ebenfalls mit einem "Segway"-ähnlichen Antrieb.
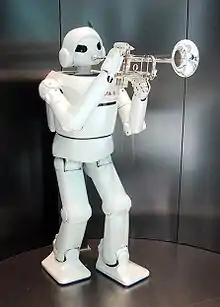
Toyota Walking
Der Toyota Walking ist die 1. von 5 Versionen. Er bewegt sich bipedal fort und kann, eine Besonderheit der Toyota Partner Robots mit Instrumenten von Menschen musizieren. Er hat spezielle Lippen, die sich so bewegen können wie menschliche, auch die Finger kann er wie ein Mensch bewegen, dies ermöglicht ihm das Trompete spielen auf einer ganz normalen Trompete.
Toyota Rolling
Der Toyota Rolling verfügt über ein ähnliches Antriebssystem wie ein Segway Personal Transporter. Seine 2 Räder ermöglichen ihm, sich schnell und wendig zu bewegen. Er kann wie der Toyota Walking auch Trompete spielen.
Toyota Mountable
Der Toyota Mountable ist nicht wie seine Roboter-Kollegen ein humanoider Roboter, eher gleicht er einem bipedalen, modernen Rollstuhlersatz. Der Transport-Laufroboter kann durch einen Joystick, der am Sitz angebracht ist gesteuert werden.
Ein ähnlicher Roboter ist der von HUBO Labs hergestellte Hubo FX-1, er ist allerdings etwas größer.
wire-operation system
Die 4. Version, das wire-operating system, ist ein humanoider Roboter, der über ein einzigartiges Bewegungssystem verfügt. In seinem Rumpf sind die Akkumulatoren und die Motoren angebracht, über Drähte kann er seine Arme und Beine bewegen.