Servolenkung
Eine Servolenkung (lateinisch servus ‚Diener‘ ‚Sklave‘) dient der Reduzierung der Kraft, die zur Betätigung des Lenkrads eines Kraftfahrzeugs beim Lenken im Stand, beim Rangieren oder bei geringen Fahrgeschwindigkeiten nötig ist. Die Servolenkung unterstützt den Fahrer beim Lenken, indem die vom Fahrer aufgebrachte Kraft zum Lenken durch ein Hydrauliksystem (Hydraulik-Pumpe, -Steuerung, -Motor) oder einen Elektromotor verstärkt wird.

In der heutigen Zeit haben fast alle Pkw eine Servolenkung, da der Trend zu Frontmotor, schwereren Fahrzeugen, breiteren Reifen und somit erhöhten Lenkkräften geht.
Begriffliche Einordnung
Technisch gesehen ist der Begriff Servolenkung nicht korrekt, da die Lenkung in den meisten Bauformen nicht allein über einen Servo ausgeführt wird, sondern mechanisch fest gekoppelt ist und nur motorisch (meist hydraulisch oder elektrisch) unterstützt wird. Ältere, technisch korrektere Bezeichnungen sind „Lenkhilfe“ oder „Hilfskraftlenkung“.[1] Erstere Bezeichnung wird auch heute noch bei manchen Prüfungen zur theoretischen Fahrerprüfung verwendet, wenngleich sich der Begriff „Servolenkung“ im Volksmund durchgesetzt hat.
Hydraulischer Antrieb (HPS)
Geschichte
Obwohl erste Patente schon früher vorlagen, war es Francis W. Davis, ein Ingenieur der Lastwagenabteilung von Pierce Arrow, der mit Forschungen begann, wie man das Lenken erleichtern könnte, und der 1926 die erste Servolenkung vorstellte. Davis wechselte dann zu General Motors und verbesserte diese hydraulische Lenkhilfe, aber der Autohersteller lehnte sie als zu kostenaufwändig ab. Davis wechselte daraufhin zu Bendix, einem Automobilzulieferer. Im Zweiten Weltkrieg stieg die Nachfrage nach Lenkhilfen besonders für schwere bzw. gepanzerte Fahrzeuge stark an.
Chrysler war der erste Automobilhersteller, der einen Pkw – den 1951er Chrysler Imperial – mit einer „Hydraguide“ genannten Servolenkung anbot. Dieses System basierte auf ausgelaufenen Davis-Patenten. General Motors stellte daraufhin die von ihrer Saginaw Product Division für die 1952er Cadillac-Modelle entwickelte eigene Servolenkung vor, die auf die fast zwanzig Jahre zuvor geleistete Arbeit von Davis zurückgriff. Einen anderen Weg ging die Packard Motor Car Company mit ihrem 1953 vorgestellten, gemeinsam mit der Gemmer Manufacturing Co. entwickelten System. Diese Lenkhilfe war nicht an der Lenksäule angebracht, sondern am Fahrgestell. Hier wirkte die Kraft auch nicht direkt auf das Lenkgestänge (was zu Beschädigungen an der Lenkung führen konnte, wenn das Lenkrad im Stand gedreht wurde), sondern griff in die Lenkgeometrie ein. Ein weiterer Vorteil war, dass die Packard-Gemmer-Lenkung konstant arbeitete, während bei der Saginaw-Version erst ein Widerstand überwunden werden musste, da das System erst ab einem gewissen Druck aktiviert wurde.[2] Dieses Prinzip setzte sich später allgemein durch.
In den 1960er Jahren hatten hydraulische Lenkhilfen die zuvor teilweise noch verwendeten pneumatischen Lenkhilfen im Kfz-Bau verdrängt. Um 1967 wurde erstmals von Bosch eine vollhydraulische Servolenkung ohne ein mechanisch wirkendes Gestänge entwickelt. Vorgesehen waren derartige Lenkhilfen für langsamfahrende Nutzfahrzeuge wie Traktoren oder Gabelstapler,[1] zumindest Traktoren werden bis heute teilweise mit vollhydraulischen Servolenkungen gebaut.
Funktion
Die Servopumpe (Hydraulikpumpe) fördert ständig einen Volumenstrom durch die Lenkung. Da aber die Lenkung bei der Geradeausfahrt oder geringen Lenkbewegungen keine Servounterstützung braucht, fließt das Öl direkt wieder zurück in den Behälter. Den Druck, der dabei entsteht, nennt man Durchflussdruck. Dies lässt sich mit einem Gartenschlauch vergleichen, durch den man ungehindert Wasser fließen lässt. Die Pumpe läuft zwar ständig mit, verbraucht aber weniger Energie als andere Verbraucher im Auto, wie z. B. Klimaanlage, heizbare Heckscheibe, Sitzheizung etc. In dem Moment, in dem eine Lenkbewegung ausgeführt wird, wird ein Teil dieses Volumenstromes in den Arbeitsraum der Lenkung geleitet. Es entsteht ein Druck im System. Den höchsten Druck erreicht man dann, wenn man die Lenkung voll in eine Richtung einschlägt. In diesem Moment wird der komplette Volumenstrom in den Arbeitsraum geleitet, ohne dass Öl direkt zurückfließen kann. Die Pumpe geht auf Block. Der entstehende Druck wird durch das Druckbegrenzungsventil auf einen maximalen Druck geregelt, den Systemdruck. Dadurch entsteht das Pfeifen, welches man hin und wieder beim Einparken hört, da dann der Ölstrom vollständig in die Arbeitsräume der Lenkung geleitet wird. In diesem Fall wird die maximale Leistung der Servopumpe erbracht. Ein weiterer Nachteil einer hydraulischen Lenkung gegenüber einer elektromechanischen Lenkung ist, dass die Wellendichtringe (Simmerringe) nach einer gewissen Betriebsdauer undicht werden können und dann ein komplizierter Austausch des Lenkgetriebes notwendig ist. Da häufig seitens des Herstellers keine Reparaturen an Teilen der Servolenkung vorgesehen sind, muss dann ggf. das komplette Lenkgetriebe gewechselt werden.
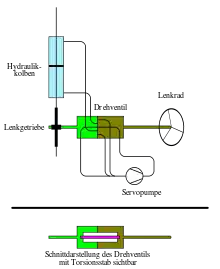
Dabei handelt es sich um ein hydraulisches System, bestehend aus der vom Motor angetriebenen Pumpe, dem Ölvorratsbehälter, dem Servoventil, dem Hydraulikzylinder sowie den dazugehörigen Druckleitungen. Das Servoventil ist meistens eine Torsionsfeder mit definierter Steifigkeit. Dreht der Fahrer das Lenkrad, wird die Torsionsfeder ausgelenkt und gibt am oberen Ende Ventilöffnungen frei, die den Strom der Hydraulikflüssigkeit freigeben, der weiter unten im System die Bewegung verstärkt. Damit reduziert sich der Widerstand im Widerlager der Torsionsfeder, so dass der Ventilquerschnitt am oberen Ende der Torsionsfeder wieder reduziert wird. Das System reguliert sich damit selbst. Mit der Steifigkeit der Torsionsfeder wird die Charakteristik der hydraulischen Servolenkung eingestellt. Aufwändigere Servolenkungen arbeiten geschwindigkeitsabhängig. Die hydraulische Kraftunterstützung der Lenkbewegungen nimmt dann mit zunehmender Fahrgeschwindigkeit ab.
Vorteilhaft ist, dass keine störungsanfälligen elektrischen Bauteile vorhanden sind; Defekte oder Schäden sind offensichtlich erkennbar, die Funktionstüchtigkeit ist leicht prüfbar.
Elektrischer Antrieb (EHPS, EPS, EPAS)
Die elektrisch angetriebene Servolenkung ist eine elektrische Hilfskraftlenkung, die nur dann arbeitet, wenn Lenkbewegungen stattfinden.
Vorteile des elektrischen Antriebes:
- Der wesentliche Vorteil des elektrischen Antriebs liegt darin, dass die Lenkung adaptiv ausgelegt und auch durch Assistenzsysteme überlagert werden kann. Das unterstützende Moment und damit die Kraft am Lenkrad kann zum Beispiel abhängig von der Fahrzeuggeschwindigkeit geändert werden. Der Zielkonflikt von starker Lenkhilfe beim Einparken (hohe Zahnstangenkräfte wegen des Bohrmoments des Reifen oder Blockade durch Anschlag an den Bordstein) und geringer Lenkhilfe bei schneller Fahrt (reduzierte Zahnstangenkraft) kann damit aufgelöst werden. Das Lenksystem kann als Aktor für weitergehende Fahrerassistenzaufgaben genutzt werden (z. B. automatische Lenkeingriffe bei ESP II, Park- und Spurhalteassistent etc.).
- Außerdem kann die Lenkunterstützung bedarfsgerecht ausgelegt werden, d. h., sie wird nur tätig, wenn sie während Lenkvorgängen auch nötig ist, was zu einer Kraftstoffersparnis von bis zu 0,25 l/100 km gegenüber konventionellen hydraulischen Lenksystemen führt.
- Da der Lenkantrieb nicht mit dem Motor gekoppelt ist (Riementrieb für die hydraulische Pumpe entfällt), kann das gleiche Lenksystem mit unterschiedlichen Motoren zusammen verwendet werden.
Nachteile des elektrischen Antriebs:
- Defekte oder Schäden in der Funktion elektrischer Systeme sind weniger leicht nachzuvollziehen. Bei programmgesteuerten Digitalsystemen gibt es Sicherheitsbedenken bezüglich nicht auszuschließender Programmfehler im Programmcode.
Elektrohydraulischer Antrieb
Das hydraulische Wirkprinzip wird weitgehend beibehalten. Allerdings übernimmt statt eines Riementriebs ein programmgesteuerter Elektromotor den Antrieb der Servopumpe, die Servoöl in das Lenkgetriebe fördert (EHPS = Electro-Hydraulic Power Steering). Die elektrische Servopumpe braucht also keinen mechanischen Riemenantrieb, sie lässt sich so motorunabhängig frei positionieren. Der Leistungsbedarf der Pumpe muss bei der Auslegung des Bordnetzes berücksichtigt werden. Moderne EHPS-Aggregate liefern bis zu 1 kW hydraulische Ausgangsleistung in Pkw-Anwendungen.
Elektromechanischer Antrieb

Hierbei unterstützt und überlagert ein programmgesteuerter Elektrostellmotor an der Mechanik der Lenkung (Lenksäule oder Lenkgetriebe) die Lenkbewegungen des Fahrers (EPS = Electric Power Steering, EPAS = Electric Power Assisted Steering). Die Hydraulik entfällt, also die Servopumpe, die Schläuche von der Servopumpe zum Lenkgetriebe und zurück, die Hydraulikflüssigkeit und der Nehmerkolben. Im Falle einer mechanischen Beschädigung, etwa bei einem Unfall, kann kein Öl austreten, da elektronische Lenkgetriebe lediglich mit Fetten geschmiert werden. Stattdessen bewirkt ein Elektromotor die Überlagerung der mechanischen Lenkbewegung durch den Fahrer mit einer unterstützenden Hilfskraft.
Man unterscheidet wiederum verschiedene Bauformen von elektromechanischen Lenksystemen. Die Positionierung der Servoeinheit (Motor, Steuergerät) und die Ausführung des Reduktionsgetriebes führen zu folgender Unterteilung:
- C-EPS = Column EPS: Positionierung der Servoeinheit im Lenkstrang, Getriebeart (Schneckenrad/welle), z. B. im BMW Z4.
- P-EPS = Pinion EPS: Positionierung der Servoeinheit am Lenkgetrieberitzel, auch Dual-Pinion-Antrieb über eine zweite, separate Ritzelwelle, Getriebeart (Schneckenrad/-welle), z. B. in der Mercedes-Benz-CLA-Klasse.
- R-EPS = Rack EPS: Positionierung der Servoeinheit parallel oder konzentrisch um die Zahnstange, Getriebeart (Riemen und Kugelumlaufgewindetrieb bei achsparalleler Anordnung), z. B. im VW Tiguan.
Sicherheit
Es existiert bei den meisten Bauformen eine mechanische Verbindung zwischen Lenkrad und Lenkgestänge, so dass das Fahrzeug auch bei Ausfall der Servounterstützung gelenkt werden kann, wenn auch nur mit sehr viel höheren Lenkkräften. Fahrzeuge, die konstruktionsbedingt sehr schwergängige Lenkungen haben (z. B. Lkw mit zwei gelenkten Vorderachsen), haben gewöhnlicherweise zwei Servopumpen, was einen vollständigen Ausfall unwahrscheinlicher macht. Zudem ist vorgesehen, dass zumindest eine Lenkpumpe durch die laufenden Räder über den Antriebsstrang auch dann angetrieben wird, wenn der Fahrzeugmotor nicht läuft (während des Abschleppens).
Einschlägige Rechtsvorschriften
Allgemein zu Lenkanlagen in Kraftfahrzeugen:
StVZO § 38 Lenkeinrichtung
- Die Lenkeinrichtung muss leichtes und sicheres Lenken des Fahrzeugs gewährleisten; sie ist, wenn nötig, mit einer Lenkhilfe zu versehen. Bei Versagen der Lenkhilfe muss die Lenkbarkeit des Fahrzeugs erhalten bleiben.
- Personenkraftwagen, Kraftomnibusse, Lastkraftwagen und Sattelzugmaschinen mit mindestens vier Rädern und einer durch die Bauart bestimmten Höchstgeschwindigkeit von mehr als 25 km/h sowie ihre Anhänger müssen den im Anhang zu dieser Vorschrift genannten Bestimmungen entsprechen.
Der Anhang zur StVZO wiederum verweist auf die Richtlinie 70/311/EWG.[3]
Literatur
- Hans-Hermann Braess, Ulrich Seiffert: Vieweg Handbuch Kraftfahrzeugtechnik. 2. Auflage, Friedrich Vieweg & Sohn Verlagsgesellschaft mbH, Braunschweig/Wiesbaden 2001, ISBN 3-528-13114-4.
- Peter Pfeffer, Manfred Harrer: Lenkungshandbuch, Lenksysteme, Lenkgefühl, Fahrdynamik von Kraftfahrzeugen. Vieweg + Teubner Verlag, Wiesbaden 2011, ISBN 978-3-8348-0751-9.
- Beverly Rae Kimes (Hrsg.): Packard. A history of the motor car and the company. General edition, 1978 Automobile Quarterly, ISBN 0-915038-11-0. (Englisch)
Weblinks
Einzelnachweise
- Vollhydraulische Hilfskraftlenkung. In: Kraftfahrzeugtechnik 12/1967, S. 380.
- Kimes: Packard (1978), S. 567–568.
- Richtlinie 70/311/EWG des Rates vom 8. Juni 1970 zur Angleichung der Rechtsvorschriften der Mitgliedstaaten über die Lenkanlagen von Kraftfahrzeugen und Kraftfahrzeuganhängern. In: Amtsblatt. L 133, 18. Juni 1970, S. 10–13.