PLC-BUS
Bei dem PLC-BUS (Powerline Communication Bus – auch PLCBUS geschrieben) handelt es sich um einen Powerline-basierten Installationsbus, bei dem die Schaltsignale über die vorhandene Hausinstallation gesendet werden, ohne dass neue Leitungen verlegt werden müssen.
Überblick
Neben Datenleitungen und Funktechnologie können Versorgungsleitungen selbst als Kommunikationsmedium dienen, im Fachjargon Powerline Communication (Stromnetz-Kommunikation). Die Vorteile dieses Übertragungsweges liegen in der hohen Zuverlässigkeit und im geringen Installationsaufwand. Das PLC-Bus-System nutzt bidirektionale Kommunikation und erreicht eine Zuverlässigkeit von 99,95 %. Dies bedeutet max. 5 Fehler bei 10.000 Befehlen.
PLC-BUS greift die Adressierung von X10-Protokoll auf und erweitert die 256 X10-Adressen um den Faktor 250 auf 64.000 Adressen. Dadurch ist PLC-BUS innerhalb der Raum- und Einheiten-Codes adresskompatibel zu X10 und kann über einen PLC-BUS/X10-Koppler X10-Geräte in die Haussteuerung einbinden. Dies ist besonders für Anwender von Interesse, die schon X10 im Einsatz haben.
Das PLC-BUS-System hat große Ähnlichkeit mit dem im anglo-amerikanischen Raum verbreiteten Universal Powerline Bus (UPB).[1]
Geschichte
PLC-BUS wurde von der holländischen Firma ATS entwickelt und wird seit 2002 als Technologie vermarktet. Die chinesische Firma Shanghai Super Smart Electronics übernahm 2005 die PLC-BUS-Technologie in ihren Home Automation-Produkten und machte PLC-BUS in Asien zu einer der führenden Technologien für die Home Automation.
Datenübertragung
Der PLC-BUS nutzt die bestehende Hausverkabelung des Stromnetzes. Zur Datenübertragung werden zwei unterschiedliche Signale benötigt: Das eigentliche Datensignal und ein Trägersignal zur Synchronisation. Ohne Trägersignal ist eine Übertragung von Daten über größere Entfernungen nicht möglich. Der PLC-BUS nutzt die Wechselspannung des Stromnetzes als Trägersignal für seine Daten. Die Wechselspannung in Deutschland basiert auf einer Sinus-Welle mit einer Spannung von 230 V und einer Frequenz von 50 Hz. Eine Frequenz von 50 Hz bedeutet, dass jede Sekunde 50 Vollwellen mit je einer positiven und einer negativen Halbwelle übertragen werden.
Dabei wird mit Hilfe der Pulsphasenmodulation das Datensignal auf das 230 V-Trägersignal aufmoduliert. Bei der Pulsphasenmodulation werden die Daten durch Impulse übertragen, die dem Trägersignal aufmoduliert werden. Durch eine zeitliche Verschiebung der Impulse und dadurch unterschiedlichen Zeitabstände zwischen den Impulsen wird die Information codiert.
Entsprechend der PLC-BUS-Spezifikation werden die Datenimpulse innerhalb eines definierten Zeitfensters in jeder Halbwelle auf das Trägersignal aufmoduliert, kurz bevor das Trägersignal den Null-Durchgang erreicht. Das Aufmodulieren der Impulse am Ende des Trägersignals hat den Vorteil, dass dieser Bereich meist frei von anderen störenden Impulsen ist und die Summe von Trägersignal und Impuls die 230 V nicht überschreitet. Das Zeitfenster startet 8,7 ms nachdem die Halbwelle den Nulldurchgang passiert hat. Das Zeitfenster ist in 4 feste Abschnitte zu je 275 µS unterteilt. Jeder Impuls muss innerhalb eines der 4 Abschnitte beginnen und enden. Anhand der Impuls-Position können zwei Bits codiert und übertragen werden. Während einer Vollwelle, bestehend aus einer positiven und negativen Halbwelle, könnten so 4 Bits übertragen werden. Zur Übertragung eines kompletten PLC-BUS-Daten-Bytes mit 8 Bits sind zwei Vollwellen oder 40 ms erforderlich. Bei einem 230 V Stromnetz mit 50 Hz ergibt dies eine Datenübertragungsrate von 200 bps.
Die Position des Impulses innerhalb des Zeitfensters wird vom Empfänger entweder als 0, 1, 2 oder 3 entsprechend der Impulsposition Tp0, Tp1, Tp2 und Tp3 interpretiert, was einer zwei Bit-Codierung wie folgt entspricht:
| Pos. | Bit 2 | Bit 1 |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 1 |
| 2 | 1 | 0 |
| 3 | 1 | 1 |
Mit diesem Modulationsverfahren wird zwar nur eine sehr geringe Datenübertragungsrate erreicht, dafür ist aber die Übertragung sehr robust und störunanfällig. Das Signal kann in der Praxis ohne Filter oder Verstärker über sehr große Strecken übertragen werden. Verglichen mit den im Local Area Network erreichbaren Datenübertragungsraten ist sie zwar sehr gering, reicht aber zur Übertragung von Steuerbefehlen vollkommen aus.
Kommunikationsweise
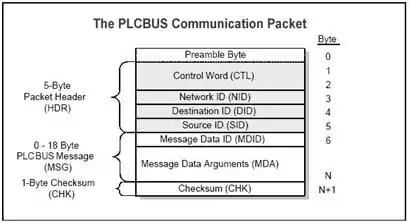
Die Kommunikation entsprechend der PLC-BUS-Spezifikation basiert auf einem Start-Byte, das vor den eigentlichen Daten geschickt wird und den Empfänger auf den Empfang von Daten vorbereitet. Das Start-Byte hat immer den gleichen Aufbau 2-1-1-2 bezüglich der Impulsposition (Tp2-Tp1-Tp1-Tp2). Die Definition eines Start-Bytes hat den Vorteil, dass bei Inaktivität keine Impulse auf die Stromleitungen aufmoduliert werden.
Im Anschluss an das Start-Byte werden fünf Bytes Kopfdaten übertragen. Diese Kopfdaten beinhalten Informationen wie Empfängeradresse, Senderadresse und die Datenlänge der nachfolgenden Daten. Die Anzahl der Bytes variiert entsprechend der Information, die übertragen werden soll und kann bis zu 18 Bytes betragen. Das übertragene Daten-Frame wird zum Schluss noch durch eine ein Byte lange Prüfsumme ergänzt, um Fehler in der Übertragung feststellen zu können.
Durch die digitale Übertragung stellt die PLC-BUS-Technologie eine sichere und hochverfügbare bidirektionale Übertragung auf Basis des bestehenden Stromnetzes dar. Aktoren können den Empfang und die Ausführung ihres Befehls dem Controller zurückmelden. Ein Controller hat jederzeit die Möglichkeit, den Status eines Aktors gezielt abzufragen und so eine Visualisierung der Zustände im Haus zu realisieren.
Literatur
- Halid Hrasnica, Abdelfatteh Haidine, Ralf Lehnert: Broadband Powerline Communications. Network Design, John Wiley & Sons Ltd, Hoboken 2004, ISBN 0-470-85741-2.
- Yung C. Shin, Chengying Xu: Intelligent Systems. Modeling – Optimization – and Control, Taylor & Francis Group, Boca Raton 2009, ISBN 978-1-4200-5176-6.
- Syed R. Rizvi: Microcontroller Programming. An Introduction, Taylor & Francis Group, Boca Raton 2012, ISBN 978-1-4398-5077-0.
Einzelnachweise
- The UPB System Description (PDF; 827 kB)