Lavet-Schrittmotor
Beim Lavet-Schrittmotor handelt es sich um einen einphasigen Schrittmotor, der elektro-mechanischen Quarz- und Funkuhren als Antrieb dient und für die „springende Sekunde“ des Sekundenzeigers verantwortlich ist.[1][2] Durch Miniaturisierung kommt er in Armbanduhren zum Einsatz und benötigt dabei nur sehr wenig Leistung, womit ein jahrelanger Batteriebetrieb möglich ist. Als Erfinder dieses Motors gilt der französische Ingenieur Marius Lavet, der das Funktionsprinzip 1936 im Patent FR823395 beschrieb.
Aufbau und Funktionsweise
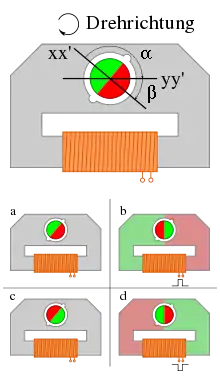
yy' Rastpunkt bestromt
α Drehbewegung nach Bestromung
β Drehbewegung nach Abklingen des Stroms
Wie andere einphasige Motoren kennt der Lavetmotor nur eine Drehrichtung, die durch die Auslegung des Stators bestimmt wird. Der Rotor besteht aus einem Permanentmagneten, in nebenstehender Abbildung sind dessen Pole rot bzw. grün eingezeichnet.
Wesentlich für die Funktion des Motors sind die Rastpunkte des Rotors, die im Stator beispielsweise durch Einkerbungen realisiert werden. Diese beiden möglichen Rastpunkte sind in nebenstehenden Detailskizzen in Position a und c dargestellt. Die Position des Rotors bei stromdurchflossener Statorspule weicht von der im stromlosen Zustand ab und ist in den beiden Darstellungen b und d dargestellt.
Befindet sich der Rotor zunächst in Ruhelage in Position a, erfolgt durch den Stromimpuls entsprechender Polarität ein Übergang in die Position b um den Winkel α. Für einen energiesparenden Betrieb sollte der Stromimpuls durch die Spule möglichst von kurzer Dauer sein, jedoch auch lange genug, damit der Rotor sich weit genug gedreht und in den Fangbereich des nächsten Rastpunktes gerät anstatt zurückzufallen. Sobald der Stromimpuls abgeschaltet wird, entsteht in Position b durch die Einkerbungen im Stator eine ungleiche magnetische Flussverteilung, wodurch ein weiteres Drehmoment zufolge der Reluktanzkräfte auf den Rotor wirkt, und der Rotor sich um den Winkel β in den stabilen Zustand c weiter bewegt. Der Stator bildet einen magnetischen Kreis, dessen magnetischer Widerstand im Bereich der Einkerbungen gegenüber den Bereichen ohne Einkerbung erhöht ist. In Position c, wie auch in der Ausgangsposition a, ist der magnetische Widerstand des Kreises für den Rotor minimal, wodurch sich die beiden Einrastpunkte ergeben.
Um den Rotor aus Position c in die Position d überzuführen, ist ein weiterer Stromimpuls mit umgekehrter Stromrichtung nötig – die Spule muss also bipolar angesteuert werden. Bei Abschalten des Stromimpulses in Position d geht der Rotor dann in die Ausgangsposition a über und der Zyklus kann von neuem beginnen.
Durch diese spezielle Form des Stators entsteht eine Art Hilfsphase ähnlich wie bei dem Spaltpolmotor, wobei die Positionen der Kerben im Stator die Drehrichtung festlegen. In der üblichen Bauform benötigt ein Lavetmotor zwei Schritte für eine Umdrehung. Angesteuert wird der Lavet-Schrittmotor in Quarzuhren durch Pulse mit einer Folgefrequenz von 1 Hz, die aus einer Frequenz von 32.768 Hz (Uhrenquarz) durch einen 215-Frequenzteiler erzeugt werden. Der diesen Teiler enthaltende Uhrenschaltkreis erzeugt auch die bipolare Pulsfolge, die abwechselnd alle 0,5 Sekunden kurzzeitig eine positive und eine negative Spannung an die Spule abgibt. Die Erzeugung der bipolaren Pulse wäre zwar auch durch Differenzierung eines 1-Hz-Rechtecksignales mittels eines Kondensator möglich (Hochpass), ein solcher Kondensator lässt sich jedoch nicht im Schaltkreis integrieren, würde also ein großes Volumen einnehmen und zusätzliche Kosten verursachen. Ein vom Rotor bewegtes Zahnrad-Getriebe treibt Sekunden-, Minuten- und Stundenzeiger an.
Neben dem klassischen Uhrenmotor gibt es verschiedene abgeleitete Varianten dieses Konzepts.[3] Motoren nach diesem Prinzip werden beispielsweise auch in Anzeigeinstrumenten für Kraftfahrzeuge eingesetzt.[4]
Literatur
- Patent FR823395: Perfectionnements aux systèmes et appareils de commande électrique à distance, notamment aux moteurs et horloges synchrones. Angemeldet am 28. September 1936, veröffentlicht am 19. Januar 1938, Anmelder: Hatot, Erfinder: Marius Lavet (Französisch).
- Patent US4550279: Step-by-step motor unit. Angemeldet am 7. September 1983, veröffentlicht am 29. Oktober 1985, Anmelder: Fabriques D'horlogerie De Fontainemelon S.A., Erfinder: Eric Klein (Erklärung des Funktionsprinzips in Englisch).
Weblinks
Einzelnachweise
- Ein geniales Konzept. 29. März 2005, Neue Zürcher Zeitung
- Thanassis Speliotis et al.: Micro-motor with screen-printed rotor magnets. Journal of Magnetism and Magnetic Materials, Volume 316, Issue 2, September 2007, S. 120–123
- Control and Analysis of Low Inertia Miniature Synchronous Motors, abgerufen am 5. Oktober 2010
- Hermann Winner, Stephan Hakuli, Gabriele Wolf: Handbuch Fahrerassistenzsysteme: Grundlagen, Komponenten und Systeme für aktive Sicherheit und Komfort. Vieweg+Teubner, 2009, S. 337