Kibō
Kibō (japanisch きぼう „Hoffnung“, ursprünglich Japanese Experiment Module, JEM) ist ein Modul der Internationalen Raumstation (ISS) und der Beitrag der japanischen Raumfahrtbehörde JAXA zur ISS.
| Kibō | ||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 Kibō-Konfiguration | ||||||||||||||||||||||
| Raumstation: | Internationale Raumstation | |||||||||||||||||||||
| Startdatum: | 11. März 2008 | |||||||||||||||||||||
| Benachbarte Module | ||||||||||||||||||||||
| ||||||||||||||||||||||
Aufbau
Kibō ist das größte Einzelmodul der ISS sowie das erste bemannte Weltraumprojekt Japans. Es kann bis zu vier Raumfahrer aufnehmen und bietet die Möglichkeit, an 23 Racks Experimente vorzunehmen, wovon in der ersten Nutzungsphase 14 geplant sind. Die Schwerpunkte der Forschung sollen im Bereich der Weltraummedizin, Biologie und der Materialforschung liegen.
Später sollte das Weltraummodul mit Experimenten und Racks versorgt werden, die mit dem autonomen japanischen HTV-Raumfrachter zur Station gebracht werden.
Als erstes Bauteil wurde das Experiment Logistics Module (ELM-PS) am 11. März 2008 gestartet und im Rahmen der Shuttle-Mission STS-123 an die ISS angedockt. ELM-PS wurde vorübergehend an der Oberseite (Zenit) des Harmony-Moduls befestigt. Die Kibō-Hauptbaugruppe Pressurized Module (PM) und der Roboterarm (RMS) wurden am 31. Mai 2008 mit der Mission STS-124 zur ISS gebracht und dort am 3. Juni 2008 angedockt. Am 4. Juni wurde die Schleuse geöffnet und um 21:09 UTC schwebte A. Hoshide zusammen mit K. Nyberg als erster in das zu diesem Zeitpunkt aus Gewichtsgründen noch leere Modul.
Im Juli 2009 wurde mit der Mission STS-127 als letztes Bauteil die Außenplattform für Experimente (EF) und das Außenlager (ELM-ES) zur ISS transportiert.
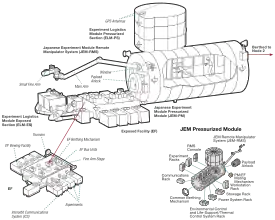
Die gesamte Einheit besteht aus fünf Teilen:
- Dem unter Druck stehenden Pressurized Module (PM). Es ist das zentrale Modul, in dem die Astronauten Experimente durchführen. Seine Länge beträgt 11,2 m bei einem Durchmesser von 4,4 m und einer Masse von 15,9 t. An der Stirnseite des zylindrischen Moduls befindet sich eine kleine Luftschleuse, durch welche z. B. Experimente von der Exposed Facility (EF) geborgen werden können.
- Dem ebenfalls unter Druck stehenden so genannten Experiment Logistics Module – Pressurized Section (ELM-PS). Dieses Modul wird hauptsächlich als Stauraum genutzt. Es hätte vom PM abgekoppelt und mit dem Space Shuttle zur Erde zurückgebracht und mit neuem Material hinauf geschickt werden können. ELM-PS ist 3,9 m lang und hat einen Durchmesser von 4,4 m. Die Leermasse beträgt 4,2 t.
- Eine Plattform für Experimente. Die Exposed Facility (EF) ist 5,60 Meter lang, 5 Meter breit, 4 Meter hoch und wird außerhalb des PM befestigt. Sie ist 5,1 m breit, 6,0 m lang und besitzt eine Masse von 4 t. Rings um die Plattform können einzelne Experimentcontainer angebracht werden.
- Das Außenlager – Experiment Logistics Module – Exposed Section (ELM-ES) wird außerhalb des EF befestigt. Es ist 4,9 m breit und 4,2 m lang. Die drucklose Ladeplatte des HTV kann zu ELM-ES mit den Roboterarmen geleert werden. Das ELM-ES wurde nach seinem Ersteinsatz zum Transport von Experimenten bei STS-127 vom Shuttle wieder mit zur Erde zurückgenommen und ist kein dauerhafter Bestandteil im Orbit.
- Dem Roboterarm des Kibō-Moduls. Der JEMRMS (Japanese Experiment Module Remote Manipulator System) besteht aus einem Hauptarm (Main Arm), der 9,9 m lang ist und Massen bis zu sieben Tonnen bewegen kann, sowie einem kleineren Arm (Small Fine Arm), der bei Bedarf angedockt wird. Dieser kleine Zusatzarm kann sehr präzise Arbeiten durchführen.
Seit Mitte 2017 wird in Kibō die Kamera-Drohne Int-Ball erprobt. Sie soll die Astronauten von Fotografiearbeiten entlasten sowie in Kooperation mit Bodenpersonal die Durchführung von Experimenten verbessern.[1]
Experimente am Exposed Facility (EF)
Folgende Experimentcontainer befinden sich derzeit an den insgesamt zwölf Ansteckplätzen (Exposed Facility Unit = EFU1 bis EFU12):
- EFU1: MAXI (Monitor of All-sky X-ray Image) – durch STS-127 transportiert
- EFU3: SMILES (Superconducting Submillimeter-Wave Limb-Emission Sounder) – von HTV-1 transportiert
- EFU6: HREP bestehend aus HICO (Hyperspectral Imager for the Coastal Ocean) und RAIDS (Remote Atmospheric and Ionospheric Detection System) – von HTV-1 transportiert
- EFU7: ICS-EF (Inter-orbit Communication System) – durch STS-127 transportiert
- EFU9: SEDA-AP (Space Environment Data Acquisition Equipment-Attached Payload) – durch STS-127 transportiert
sowie für den Roboterarm:
- SFA (Small Fine Arm)-Erweiterung des Roboterarms für filigrane Tätigkeiten – von HTV-1 transportiert.
Galerie
 Kibō (Hoffnung) Aufbau
Kibō (Hoffnung) Aufbau Mark Vande Hei im Kibō-Modul
Mark Vande Hei im Kibō-Modul Innenansicht
Innenansicht Kibō PM in der Fertigung
Kibō PM in der Fertigung Kibō ELM-PS in der Fertigung
Kibō ELM-PS in der Fertigung
Quellen
- JAXA: Kibō-Homepage (englisch)
- JAXA: Assembly of Japanese Experiment Module (JEM) Kibo Fast Approaching (englisch)
Weblinks
Einzelnachweise
- JAXA: First disclosure of images taken by the JEM Kibo’s internal drone "Int-Ball". 14. Juli 2017, abgerufen am 18. Juli 2017 (englisch).

Sarja · Unity · PMA · Swesda · Integrated Truss Structure · Destiny · ESP · Mobile Servicing System · Canadarm2 · Quest · Pirs · Strela · Harmony · Columbus · Kibō · Canada Hand · Poisk · ELC-1, 2 3 & 4 · Tranquility · Cupola · Rasswet · PMM Leonardo · Alpha-Magnet-Spektrometer · BEAM · Bishop · Nauka · ERA · Pritschal
Noch zu startende Module: Axiom
Gestrichene Module: CAM · Habitation Module · ICM · IPM · SPM · SPP · UDM · DSM · MPM Enterprise · Crew Return Vehicle