Inverses Pendel
Das inverse Pendel ist ein Pendel mit dem Schwerpunkt oberhalb der Achse. Das Pendel befindet sich in seinem höchsten Punkt in einer instabilen Ruhelage. Das inverse Pendel ist eine der Standardaufgaben der Regelungstechnik für die Stabilisierung einer instabilen Regelstrecke.

Ein Standardbeispiel für ein inverses Pendel ist ein Wagen mit einem darauf montierten inversen Pendel. Die Pendelbewegung kann durch die horizontale Bewegung des Wagens beeinflusst werden.
Bauformen
Die Standardaufgabe eines linearen inversen Pendels kann in ihrer Dimension erweitert werden. Eine mögliche Erweiterung ist ein zweiter Freiheitsgrad der Achse, eine andere Erweiterung stellt ein inverses Pendel mit mehreren Achsen und gekoppelten Pendeln dar.
Räumliches inverses Pendel
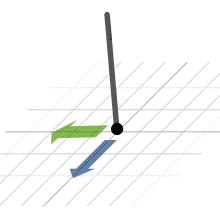
Beim räumlichen inversen Pendel bewegt sich die Achse, also zum Beispiel der Wagen, nicht entlang einer Geraden, sondern frei in der Ebene. Die Achse des inversen Pendels ist in zwei Richtungen beweglich, das Pendel kann somit in alle Richtungen kippen.
Die Achse muss nun analog zum linearen inversen Pendel in der Ebene in der Art bewegt werden, dass es nicht kippt. Technische Aufbauten könnten diese Aufgabe entweder durch einen Roboterarm mit mindestens zwei Freiheitsgraden oder einem frei in Ebene beweglichen Wagen lösen.
Anschaulich ist hier die Aufgabe, die ein Artist beim Balancieren eines Stabes auf der Hand erfüllt.
Inverses Pendel als regelungstechnische Aufgabe
Das inverse Pendel befindet sich im höchsten Punkt in einer instabilen Ruhelage. Das inverse Pendel, betrachtet als System, strebt stets den Zustand der geringsten Gesamtenergie an. Dieser Zustand befindet sich in einer Schwingung um die stabile Ruhelage bzw. in dieser. Kleine Auslenkungen aus der instabilen Ruhelage führen dazu, dass der Pendelstab diese Ruhelage verlässt. Dem System muss dann die notwendige Energie konstant zugeführt werden, um in seiner instabilen Ruhelage zu bleiben.
Die zu steuernde Größe bei einem inversen Pendel ist der Winkel zwischen Pendel und Vertikalachse. Der Winkel wird fortlaufend gemessen und mit einer Führungsgröße verglichen. Die Führungsgröße ist , was dem Pendel in seiner aufrechten Position entspricht. Entsteht eine Abweichung zwischen gemessener Größe, dem Istwert, und Führungsgröße, dem Sollwert, erfolgt eine Steuerung, um Ist- und Sollwert wieder anzugleichen. Die Steuerung erfolgt beim inversen Pendel in den obigen Bauformen durch Bewegung des Basispunkts, um diesen unter den Schwerpunkt des inversen Pendels zu bewegen.


Die Messung des Winkels erfolgt in der Regel entweder über einen Lagesensor oder einen Drehwinkelgeber in der Achse des Pendels. Die Differenz zwischen Soll- und Istwert wird durch einen Regler in eine Stellgröße für den Aktuator übersetzt.
Anwendungsfälle
.jpg.webp)
Anwendungen des inversen Pendels finden sich in verschiedenen Ausprägungen im Alltag. Ein Beispiel ist das Balancieren von Personen und Gegenständen, wie es von Artisten in der Akrobatik praktiziert wird. Auch ein aufrecht stehender Mensch kann als inverses Pendel betrachtet werden: Der Schwerpunkt liegt oberhalb der Standfläche, und Körperbewegungen bringen das Pendel aus dem Gleichgewicht, sodass eine Gegenbewegung erforderlich ist, um dieses wiederherzustellen bzw. zu erhalten.
Das Fahren auf einem Einrad kann als Fahren auf einem inversen Pendel interpretiert werden. Der Segway Personal Transporter, ein einachsiger Elektromotorroller, übernimmt das Ausbalancieren für den Fahrer mittels elektronischer Regelung.
Die Trägerrakete Grasshopper der US-Firma SpaceX nutzt das Prinzip, um aufrecht starten und auch wieder landen zu können.
Literatur
- Fritz Tröster: Steuerungs- und Regelungstechnik für Ingenieure. 2. Auflage. Oldenbourg Verlag, 2005, ISBN 3-486-57681-X.
Weblinks
- Didaktische Betrachtung (PDF; 1,4 MB) des inversen Pendels als Aufgabe in der Lehre
- Diplomarbeit (PDF; 457 kB) zum inversen Pendel
- Video eines einfachen inversen Pendels gebaut mit Lego Mindstorms