Dynamischer Segelflug
Dynamischer Segelflug ist eine Flugtechnik, bei der ein Vogel oder ein Flugzeug aus der Windscherung, also einem nicht konstanten Windfeld, Energie gewinnen kann. Hierbei versucht der Vogel oder der Pilot des Flugzeugs, die Flugbahn so zu wählen, dass der Energiegewinn (infolge der Windscherung) den Energieverlust (infolge des Strömungswiderstands) im zeitlichen Mittel übertrifft.

Unter Ausnutzung des Dynamischen Segelflugs können Albatrosse wenige Meter über dem Meer fliegend sehr weite Strecken zurücklegen.[1][2][3][4] Der Dynamische Segelflug wird auch von Segelflugmodell-Piloten praktiziert. Während der Albatros den Energiegewinn zur Fortbewegung ausnutzt, wird im Dynamischen Segelflug mit Segelflugmodellen der Energiegewinn ausgenutzt, um auf einer örtlich näherungsweise konstanten Bahn immer schneller zu fliegen.
Funktionsprinzip
Ein einfaches Modell, an dem sich das Funktionsprinzip des Dynamischen Segelflugs erklären lässt, besteht aus zwei Luftschichten mit unterschiedlicher Windgeschwindigkeit: Das Flugzeug fliegt darin zyklisch von einer Schicht in die andere und durchstößt wiederholt die Trennschicht zwischen den Luftschichten. Weiter unten wird dieses Zwei-Schichten-Modell genauer beschrieben, in Kürze: Beim Durchstoßen der Trennschicht bleibt die Geschwindigkeit über dem Boden wegen der Impulserhaltung konstant, es ändert sich aber jeweils die Geschwindigkeit gegenüber der Luft. Bei den Wenden bleibt die Geschwindigkeit in der Luft konstant, während die Grundgeschwingdigkeit ihr Vorzeichen wechselt. Im reibungsfreien Idealfall würde das Flugzeug mit jedem Zyklus das Doppelte der Geschwindigkeitsdifferenz der beiden Luftschichten an Geschwindigkeit gewinnen. Im Allgemeinen wird der Gewinn an kinetischer Energie (oder Höhe) jedoch durch Reibungsverluste deutlich geringer ausfallen.[5][6][7]
Zwei-Schichten-Modell
Der Energiegewinn des Flugzeugs lässt sich an einem Zwei-Schichten-Modell verdeutlichen.
Modellannahmen

- Schreibweise: v sei der Betrag des Geschwindigkeitsvektors über Grund, w sei der Betrag des Windgeschwindigkeitsvektors.
- Unterhalb einer Trennschicht herrsche kein Wind, d. h. w=0. Oberhalb der Schicht herrsche Wind w nach rechts.
- Das Flugzeug erzeuge, während es entweder über oder unter (aber nicht in) der Trennschicht fliegt, keinen Widerstand.
- Beim Durchfliegen der Trennschicht bleiben die Luftkräfte unabhängig von der Trennschichtdicke beschränkt.
- Das Flugzeug durchfliege die Trennschicht wie dargestellt unter sehr kleinem Winkel.
Zwei verschiedene Zustandsänderungen
Das Flugzeug erlebt zwei verschiedene Zustandsänderungen:
- Das Fliegen entweder nur innerhalb der oberen oder nur innerhalb der unteren Schicht (ohne Berührung der Trennschicht) auf einem beliebigen Flugweg: Während das Flugzeug sich innerhalb einer dieser Schichten aufhält, verfügt es (da es keine Reibung gibt) über eine zeitlich konstante Gesamtenergie, die sich zusammensetzt aus der potentiellen und der kinetischen Energie (gegenüber Luft), nämlich E / m = 0,5 u u + g h. Das bedeutet, dass das Flugzeug an zwei verschiedenen Punkten, die auf derselben Höhe z liegen, immer dieselbe Geschwindigkeit ggü. Luft hat – unabhängig von seiner Flugrichtung. Dass E / m = 0,5 u u + g h für das Fliegen innerhalb einer Schicht eine Erhaltungsgröße ist, sieht man auch daran, dass die rechte Seite der letzten Gleichung im Abschnitt „Beschreibung mit Energiebilanz“ für das Fliegen in einer Schicht mit konstantem Wind (wie hier gegeben) gleich Null ist.
- Das Durchstoßen der Trennschicht: Beim Durchfliegen der Trennschicht bleibt der Impuls, also die Geschwindigkeit ggü. Grund, erhalten. Dies liegt daran, dass die (Widerstands-)Kraft, die beim Durchfliegen der Schicht auf das Flugzeug wirkt, endlich ist und dass gleichzeitig die Zeitdauer des Durchfliegens der Schicht sehr gering ist, siehe hierzu Kraftstoß. Die Schicht kann schließlich in Gedanken immer dünner gemacht werden (und/oder das Flugzeug immer schneller), bis sich der Impuls des Flugzeugs beim Durchfliegen überhaupt nicht ändert, so dass v konstant bleibt.
Beschreibung der Zustände an vier Stellen
- Stelle 1: Einfliegen in die Trennschicht: Geschwindigkeit ggü. Grund ist (Anfangsgeschwindigkeit). Da kein Wind ist, ist die Geschwindigkeit ggü. Luft .
- Stelle 2: Die Geschwindigkeit ggü. Luft ist angestiegen auf , Geschwindigkeit über Grund weiterhin (Flugzeug fliegt nach links und hat Gegenwind).
- Stelle 3: Hier ist und (Flugzeug fliegt nach rechts und hat Rückenwind, vorher flog es nach links mit ).
- Stelle 4: Nun ist und (unabhängig von der Flugrichtung).






Dieser Prozess lässt sich nun wiederholen. Die kinetische Energie des Flugzeugs steigt dabei immer weiter an. Je nachdem, ob man die kinetische Energie in einem Inertialsystem (etwa „über Grund“) betrachtet oder jeweils gegenüber der lokalen Luft (siehe nächster Abschnitt), findet der Energiezuwachs in der (oberen) Kehre statt (elastischer Stoß) bzw. jeweils bei der plötzlichen Zunahme des Fahrtwindes beim Übergang in die andere Luftschicht.
Energiebilanz
Der Energiegewinn des Flugzeugs lässt sich auch durch Auswertung des Impulssatzes verdeutlichen.
Bezugssystem, Geschwindigkeiten und Kräfte
Das Bezugssystem sei bis auf die Erdbeschleunigung frei von Scheinkräften. Es kann ein mit dem Erdboden verbundenes Koordinatensystem sein („über Grund“) oder eines, das sich mit der mittleren Geschwindigkeit des Windes konstant bewegt.
In einem solchen Bezugssystem seien der Geschwindigkeitsvektor des Flugzeugs und der Geschwindigkeitsvektor der Luft an dem Ort, an dem sich das Flugzeug jeweils gerade befindet, sodass die Airspeed ist. Die für den Effekt wesentliche zeitliche Ableitung der Geschwindigkeit , , enthält sowohl die tatsächliche zeitliche Änderung des Windfeldes als auch den meist dominierenden Beitrag der Richtungsableitung.




Auftrieb und Widerstand werden als spezifische Größen (Einheit N/kg) verwendet, also als Beschleunigungen wie die Erdbeschleunigung , sodass sich die Masse des Flugzeugs herauskürzen lässt.



Der Widerstand ist definitionsgemäß parallel zur Anströmung und der Auftrieb senkrecht dazu. Letzteres lässt sich mittels Skalarprodukt so ausdrücken:


Impuls und Energiebilanz
Nach dem Impulssatz gilt

also

Um eine Energiebilanz zu gewinnen, wird die letzte Gleichung skalar mit multipliziert und eingesetzt. Es folgt



Einsetzen von v=w+u liefert

Wird der Betrag von mit g bezeichnet und die zu parallele Komponente der Geschwindigkeit als Änderungsrate der Höhe geschrieben, so ist Damit erhält man


Anwendung der Produktregel ergibt eine Bilanz der ‚spezifischen Energie gegenüber Luft‘

Ebenfalls nützlich ist die Darstellung

Auswertung des Ergebnisses
Die ‚spezifische Energie gegenüber Luft‘ ist die Summe aus ‚kinetischer Energie gegenüber Luft‘ und potentieller Energie. Diese Energie ist die für Segelflugzeuge (oder Vögel) bedeutende. Ein Überschuss an ‚kinetischer Energie gegenüber Luft‘ (zu hohe Geschwindigkeit gegenüber Luft) kann in Höhe umgewandelt werden und umgekehrt. Aus diesem Grund zeigen auch Variometer die Änderung genau dieser Energie an (bis auf den Faktor mg).
Die zeitliche Veränderung der ‚spezifischen Energie gegenüber Luft‘ wird durch die drei Terme auf der rechten Seite beeinflusst: Der erste Summand ist die spezifische Leistung aufgrund des Widerstands. Dieser Term ist immer negativ. Der mittlere Summand ist die spezifische Leistung aus Aufwind oder Abwind. Bei Aufwind ist . Das heißt, Aufwinde erhöhen die Energie des Flugzeugs. Der rechte Summand ist die spezifische Leistung infolge der Windscherung. Er zeigt, dass Energiegewinn aus der Windscherung auf denjenigen Abschnitten der Flugbahn entsteht, wo die Windkomponente in Anströmrichtung −u zunimmt, d. h. dort wo .

An der letzten Gleichung erkennt man: Zeigt der Vektor der Gesamt-Luftkraft (Beschleunigung) in Richtung von w (der Windgeschwindigkeit gegenüber dem mittleren Wind), so erhöht dies die Energie 1/2 v·v + gh. Um Fehlinterpretationen zu vermeiden, sollten v und w als Geschwindigkeiten relativ zur mittleren Windgeschwindigkeit definiert sein.
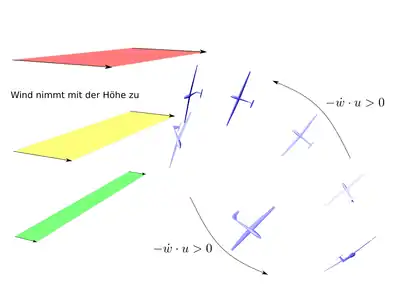
Geeignete Flugbahnen
Nicht bei jeder Flugbahn lässt sich Energie aus einem Windfeld gewinnen. Sondern bei gegebenem Windfeld und Flugzeug lassen sich Flugbahnen dahingehend vergleichen, wie groß der Energiegewinn (pro Zeit) ist.
Wenn ein horizontaler, richtungskonstanter, aber mit der Höhe zunehmender Wind weht, wie im obigen Bild dargestellt, eignet sich als Flugbahn z. B. ein geneigter Kreis, dessen tiefster Punkt gleichzeitig der am weitesten windabwärts liegende ist. Der obere Halbkreis kann ‚umgeklappt‘ werden, so dass sich ein Albatros oder Flugzeug auch quer zur Windrichtung fortbewegen kann.
Auch wenn der Wind vertikal weht und nicht konstant ist (wie z. B. in einem Aufwindfeld), kann das Flugzeug aus dieser Scherung Energie gewinnen: Wenn z. B. das Aufwindfeld in seinem Innern stark ist und zum Rand hin schwächer wird, ist es günstiger, ‚nach unten‘ in das Aufwindfeld einzufliegen und ‚nach oben‘ aus ihm herauszufliegen als umgekehrt.
Literatur
- Thomas, Fred: Fundamentals of Sailplane Design. College Park Press, 1999, ISBN 978-0-9669553-0-9 (eingeschränkte Vorschau in der Google-Buchsuche).
Weblinks
- rcspeeds.com Modellflieger-Website
- Spencer Lisenby: The 835 km/h Sailplane and Dynamic Soaring. Konferenzbeitrag zum Big Techday 10, München, 2. Juni 2017 (YouTube-Video).
Einzelnachweise
- Lord Rayleigh: The Soaring of Birds. In: Nature. Band 27, 1883, S. 534–535, doi:10.1038/027534a0 (nature.com [PDF; abgerufen am 2. Dezember 2014]).
- J. A. Wilson: Sweeping flight and soaring by albatrosses. In: Nature. Band 257, 1975, S. 307–308, doi:10.1038/257307a0 (nature.com [abgerufen am 2. Dezember 2014]).
- H. Weimerskirch, T. Guionnet, J. Martin, S. A. Shaffer, D. P. Costa: Fast and fuel efficient? Optimal use of wind by flying albatrosses. In: The Royal Society Proceedings B. Band 267, Nr. 1455, 2000, doi:10.1098/rspb.2000.1223 (royalsocietypublishing.org [abgerufen am 2. Dezember 2014]).
- Gottfried Sachs: Minimum shear wind strength required for dynamic soaring of albatrosses. In: IBIS - international journal of avian science. Band 147, 2005, S. 1–10, doi:10.1111/j.1474-919x.2004.00295.x.
- Alexander Knoll: Untersuchung zum bemannten Dynamischen Segelflug. Herbert Utz Verlag Wissenschaft, 1995, ISBN 3-931327-95-7 (eingeschränkte Vorschau in der Google-Buchsuche).
- ingo Martin: Dynamischer Segelflug für Kleinfluggeräte. (PDF, 5,6 MB) Studienarbeit. Institut für Flugsystemdynamik, RWTH Aachen, 11. April 2011, abgerufen am 8. Dezember 2014.
- Dynamischer Segelflug. RC-Network.de, abgerufen am 8. Dezember 2014.