Widerstandsläufer (Elektromotor)
Ein Widerstandsläufer ist ein Sonder-Käfigläufer, der in Drehstromasynchronmotoren eingebaut wird, um ein bestimmtes Anlaufverhalten eines Motors zu erreichen. Aufgrund seines erhöhten Schlupfes wird er auch als Schlupfläufer bezeichnet.[1]

Aufbau und Eigenschaften
Die Nutform und der Aufbau des Widerstandsläufers sind die gleichen wie beim normalen Käfigläufer. Allerdings bestehen beim Widerstandsläufer die Leiterstäbe aus Messing oder aus Aluminiumlegierungen. Dadurch haben die Stäbe einen größeren ohmschen Widerstand, der über den gesamten Drehzahlbereich des Motors konstant bleibt.[2] Allerdings entstehen durch den großen ohmschen Widerstand, der auch nach dem Hochlaufen des Motors nicht kleiner wird, relativ große Verluste. Um die dabei entstehende Verlustwärme besser abzuführen, haben Motoren mit Widerstandsläufer ein größeres Gehäuse als Motoren mit normalem Käfigläufer.[3]
Betriebsverhalten
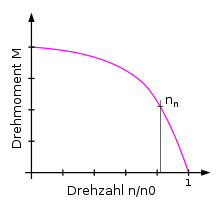
Durch den höheren Läuferwiderstand wird gleichzeitig die Phasenverschiebung verringert, dadurch steigt der Wirkleistungsanteil.[4] Das maximale Drehmoment verschiebt sich, aufgrund des hohen Wirkwiderstandes, zu tiefen Drehzahlen. Motoren mit Widerstandsläufer haben deshalb ein hohes Anlaufmoment , welches somit auch das größte auftretende Drehmoment ist.[5][6] Außerdem wird durch den hohen Rotorwiderstand der Anlaufstrom reduziert.


Allerdings kommt es im Betrieb, bedingt durch den hohen Wirkwiderstand der Läuferstäbe, zu einem großen Schlupf. Ein großer Schlupf hat jedoch zur Folge, dass das Drehzahlverhalten sehr lastabhängig ist.[7] Dadurch haben Motoren mit Schlupfläufer ein weiches Drehzahlverhalten ohne ausgeprägten Kipppunkt.[8] Widerstandsläufer haben einen schlechten Wirkungsgrad.[6]
Verwendung
Widerstandsläufer werden für besondere Anwendungen, wo ein weiches Drehzahlverhalten erwünscht ist, z. B. Aufzüge, gebaut. Allerdings werden sie nur noch selten verwendet, da bei normalem Käfigläufer mit verlustarmen elektronischen Zusatzeinrichtungen ein ähnliches Betriebsverhalten erzielt werden kann.[3]
Vor- und Nachteile
- Vorteile
- hohes Anlaufmoment
- geringer Anlaufstrom
- Nachteile
- hoher Schlupf
- hohe Verluste
- schlechter Wirkungsgrad
Quelle:[1]
Literatur
- H.R. Risg: Elektrotechnik für den Praktiker. 1. Auflage, Buchverlag Elektrotechnik Walter Liechti, Aarau (Schweiz) 1990, ISBN 3-905214-11-3
Einzelnachweise
- Hans-Otto Seinsch: Grundlagen elektrischer Maschinen und Antriebe. 3. neubearbeitete und erweiterte Auflage, Springer Fachmedien Wiesbaden, Wiesbaden 1993, ISBN 978-3-519-06164-9.
- Hans-Dieter Stölting, Eberhard Kallenbach: Handbuch Elektrische Kleinantriebe. Carl Hanser Verlag, München Wien 2006, ISBN 978-3-446-40019-1.
- Manfred Rudolph, Ulrich Wagner: Energieanwendungstechnik. Wege und Techniken zur effizienteren Energienutzung, Springer Verlag Berlin-Heidelberg, Berlin 2008, ISBN 978-3-540-79021-1, S. 204–205.
- Günter Springer: Fachkunde Elektrotechnik. 18. Auflage, Verlag Europa-Lehrmittel, Wuppertal, 1989, ISBN 3-8085-3018-9.
- Rolf Gloor: Elektrische Antriebssysteme (zuletzt abgerufen am 9. Oktober 2012).
- Germar Müller, Bernd Ponick: Grundlagen elektrischer Maschinen. 9. Auflage, Wiley-VCH Verlag GmbH & Co KGaA., Weinheim 2006, ISBN 3-527-40524-0
- Ernst Hörnemann, Heinrich Hübscher: Elektrotechnik Fachbildung Industrieelektronik. 1 Auflage. Westermann Schulbuchverlag GmbH, Braunschweig, 1998, ISBN 3-14-221730-4.
- Manfred Rudolph, Ulrich Wagner: Energieanwendungstechnik. Springer Verlag, Berlin Heidelberg 2008, ISBN 978-3-540-79021-1.