Sollfahrttheorie
Die Sollfahrt- oder MacCready-Theorie dient der Maximierung der Reisegeschwindigkeit von Segelflugzeugen, Hängegleitern und Gleitschirmen. Da diese Luftfahrzeuge keinen Antrieb besitzen, sind sie für Flüge über weite Strecken darauf angewiesen, Aufwinde zu nutzen. Sie verweilen dabei einige Zeit – meist kreisend – im Aufwind, um sich von ihm in die Höhe tragen zu lassen. Anschließend nutzen sie die Höhe, um den nächsten Teil der Flugstrecke im Gleitflug zurückzulegen.
Die Sollfahrttheorie hilft dem Piloten bei der Entscheidung, wie lange er den Aufwind nutzen sollte, um insgesamt möglichst schnell voranzukommen. Außerdem gibt sie Hinweise, wie schnell im Aufwind und im Gleitflug geflogen werden sollte. Dabei werden die Entfernung zur nächsten Thermik, ihre Stärke und die Eigenschaften des Luftfahrzeugs berücksichtigt.
Grundannahmen
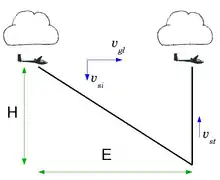
Die Sollfahrttheorie bezieht sich auf ein Modell, welches rechts dargestellt ist. Das Flugzeug gleitet von einem Aufwind zum nächsten, legt eine Strecke zurück und verliert dabei an Höhe. Beim nächsten Aufwind angekommen, kreist es wieder zur Ausgangshöhe empor. Fliegt der Pilot zu schnell, so kommt er tiefer am Aufwind an und muss sehr lange steigen. Fliegt er zu langsam, kommt er zwar hoch an ist aber dabei sehr langsam. Zwischen diesen beiden Extremen liegt die optimale Vorfluggeschwindigkeit, bei der die Reisegeschwindigkeit maximal wird.
Die Sollfahrttheorie beruht auf folgenden Annahmen:
- Das Flugzeug steigt nur beim Kreisen im Aufwind, während des Gleitflugs sinkt es.
- Der nächste Aufwind wird immer erreicht.
- Der Pilot kann die Stärke des nächsten Aufwindes abschätzen.
Gerade die beiden letzten Annahmen sind in der Praxis nicht immer gegeben. Entspricht das Steigen des nächsten Aufwindes nicht der Erwartung, dann wird auch mit nicht optimaler Geschwindigkeit geflogen. Kann der nächste Aufwind nicht sicher erreicht werden, kann es unter Umständen sinnvoll sein, mit einer anderen Fahrt zu fliegen.
Mathematische Herleitung
Die Reisegeschwindigkeit
- Fluggeschwindigkeit (Gleiten)
- Sinkgeschwindigkeit (positive Zahl!)
- Steiggeschwindigkeit im Aufwind
- Reisegeschwindigkeit (Durchschnittsgeschwindigkeit)




- Entfernung zum nächsten Aufwind
- Höhe, die abgeglitten und wieder aufgestiegen wird


- Zeit des Gleitens
- Zeit des Steigens
- Gesamtzeit



| (1) | Reisegeschwindigkeit = Entfernung / Zeit | |
| (2) | Gesamtzeit = Vorflugzeit + Steigzeit | |
| (3) | Höhe = Vorflugzeit * Sinken | |
| (4) | Höhe = Steigzeit * Steiggeschwindigkeit | |
| (3) mit (4) gleichsetzen | ||
| (5) | Nach Steigzeit auflösen | |
| (6) | Gleitzeit = Entfernung / Fluggeschwindigkeit | |
| (7) | (6) in (5) einsetzen | |
| (6) und (7) in (2) einsetzen | ||
| (8) | Gesamtzeit | |
| (9) | (8) in (1) einsetzen |












Die Gleichung (9) gilt für jede geflogene Geschwindigkeit und jedes Flugzeugsinken.
Die optimale Vorfluggeschwindigkeit
- Fluggeschwindigkeit (Gleiten)
- Sinkgeschwindigkeit des Flugzeugs gegenüber der Luftmasse (positiv)
- (Erwartete) Steiggeschwindigkeit im Aufwind
- meteorologisches Sinken der Luftmasse beim Gleiten (positiv)

- Zeit des Gleitens
- Zeit des Steigens
- Gesamtzeit

| (1) | Gesamtzeit = Vorflugzeit + Steigzeit | |
| (2) | Zeiten durch Quotienten aus Strecke und Geschwindigkeit ersetzen | |
| (3) | Der Höhenverlust ergibt sich aus der Summe Sinken (Meteorologisch + Flugzeug) durch Geschwindigkeit * Entfernung. | |
| (3) in (2) einsetzten. | ||
| (4) | Dies ist Gesamtzeit als Funktion der (Vorflug-)Geschwindigkeit. Um jetzt das Optimum zu ermitteln, differenziert man diese Gleichung nach der Geschwindigkeit und setzt diese gleich Null. | |
| (5) | Die Entfernung ist immer ungleich Null, also muss der geklammerte Ausdruck Null werden. | |
| Dieses Ergebnis kann man auch als Verhältnisgleichung hinschreiben. | ||
| (6) | Die sogenannte Sollfahrtgleichung. |







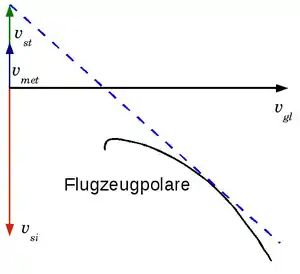
Der Term kann als Punkt auf der Y-Achse aufgetragen werden. Die Optimale Geschwindigkeit erhält man durch das Anlegen einer Tangente an die Flugzeugpolare. Dies wird durch den Term auf der linken Seite von Gleichung (6) ausgedrückt. An der Y-Achse kann die ermittelte, optimale Fahrt abgelesen werden.

Die Praxis läuft etwa so ab: Der Pilot schätzt zunächst die Stärke des nächsten Aufwindes und stellt diese Größe an seinem Sollfahrtgeber (meist im Variometer integriert) ein. Während des Gleitfluges variiert er die Geschwindigkeit in Abhängigkeit von den meteorologischen Auf- und Abwinden () nach den Vorgaben des Sollfahrtgebers. Wenn die Luftmasse sinkt, fliegt der Pilot schneller; wenn sie steigt, langsamer. Durch diese Vorgehensweise optimiert er seine Geschwindigkeit und kommt insgesamt schneller zum Ziel. Der Segelflieger, Physiker und Ingenieur Paul MacCready erfand dazu einen drehbaren Ring, der auf das Variometer aufgesteckt wird. Man kann die optimale Geschwindigkeit damit direkt ablesen. Paul MacCready gewann im Jahr 1956 die Segelflug-Weltmeisterschaft[1].

Näherungsweise Berechnung der optimalen Vorfluggeschwindigkeit
Die Geschwindigkeitspolare des Flugzeugs stellt den Zusammenhang zwischen Fluggeschwindigkeit und der Eigensinkgeschwindigkeit des Flugzeugs dar. Die Polare kann durch eine quadratische Funktion angenähert werden. Durch das Einsetzen der Näherungsgleichung in die Sollfahrtgleichung kann die optimale Fahrt einfach berechnet werden.
- Fluggeschwindigkeit (Gleiten)
- Sinkgeschwindigkeit (positive Zahl!)
- (Erwartete) Steiggeschwindigkeit im Aufwind
- Meteorologische Bewegung der Luftmasse (Steigen/Sinken) beim Gleiten
- Koeffizienten der quadratischen Funktion, sie hängen vom Flugzeugtyp und der Flächenbelastung ab.

| (1) | Flugzeugpolare, genähert | |
| (2) | Die Näherungsgleichung differenziert nach der Geschwindigkeit. | |
| (1) und (2) wurden in die Gleichung (6) des vorhergehenden Kapitels (Die optimale Vorfluggeschwindigkeit) eingefügt. | ||
| (3) | Die optimale Fahrt (Sollfahrt) als Funktion der Koeffizienten a und c sowie der meteorologischen Luftbewegung während des Gleitens und der erwarteten Stärke des nächsten Aufwindes. |






Skala des Sollfahrtringes
Ein Beispiel soll hier erklären, wie die obige Sollfahrtgleichung (6) in eine Skala abgebildet wird und im Sollfahrtring nach MacCready praktische Verwendung findet.
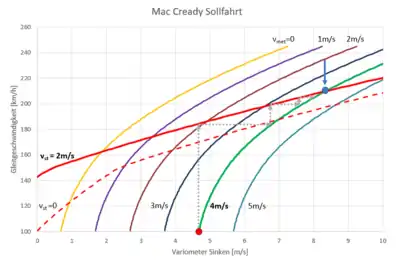
Das vorliegende Diagramm beruht auf der Geschwindigkeitspolaren einer LS4: Auf der x-Achse ist der Wert des totalen Sinkens , also praktisch die Anzeige des Variometers und auf der y-Achse die Gleitgeschwindigkeit aufgetragen. Die strichlierte Kurve ist das Ergebnis der Formel (6) für ein erwartetes Steigen (der Differenzialquotient wurde aus der Polaren numerisch bestimmt). Hat man ein erwartetes Steigen , so verschiebt sich die Kurve um den entsprechenden Wert nach links, was in der Praxis durch Drehen des MacCready Ringes um den geschätzten Steigwert erfolgt. Die stark hervorgehobene rote Kurve entspricht der Sollfahrt für ein erwartetes Steigen von und wird im folgenden Beispiel verwendet.




Im Diagramm sind weiters die Kurven des totalen Sinkens gemäß der Polaren für verschiedene Werte des meteorologischen Luftsinkens für eingetragen.

Wir legen hier als Beispiel ein erwartetes Steigen von 2 m/s sowie ein meteorologisches Luftmassensinken von 4 m/s zugrunde; es gilt also die fett in rot hervorgehobene Sollfahrtkurve und die Polare in grün. Angenommen wir fliegen nun in der Gleitphase mit einer Geschwindigkeit von 100 km/h (roter Punkt); dann zeigt das Variometer laut grüner Kurve ein Sinken von 4,7 m/s an. Die rote MacCready Kurve gibt für dieses Sinken jedoch eine optimale Geschwindigkeit von 185 km/h vor. Drücken wir den Knüppel, um diese Geschwindigkeit zu erreichen, so beträgt das neue Sinken etwa 6,7 m/s. Der optimale Wert für die Gleitgeschwindigkeit ist hier aber 200 km/h, und so weiter... Wie man anhand der grauen Pfeile erkennt, nähern wir uns durch diese Vorgabe iterativ jenem optimalen Wert an, der durch den Schnittpunkt der Polaren mit der MacCready Kurve definiert wird (blauer Punkt); dabei bewegen wir uns immer entlang der Kurve für 4 m/s (Luftmassensinken hier als konstant angenommen).
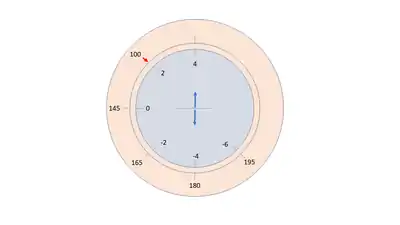
Der MacCready Ring (siehe Bild rechts) hat eine kreisförmige Skala, die gemäß der strichlierten Kurve nichtlinear beschriftet ist und drehbar am Variometer angebracht wird. Stellt man den Nullpunkt des Ringes (markiert durch einen Pfeil) auf den Variometerwert des erwarteten Steigens (also auf einen positiven Steigwert), so ist für jeden Sinkwert im Gleitflug die entsprechende optimale Gleitgeschwindigkeit am Ring abzulesen. Man kann dem optimalen Richtwert natürlich immer nur näherungsweise nachfliegen, in der Praxis macht es keinen Sinn, genau diesen Wert erreichen zu wollen.
Da sich die Polare mit zunehmender Flughöhe aufgrund der abnehmenden Luftdichte ändert, stellt die Verwendung des Sollfahrtringes prinzipiell nur eine brauchbare Näherung dar. Moderne elektronische Sollfahrtgeber kombinieren alle vorhandenen Messwerte automatisch und führen auch die entsprechenden Korrekturen durch, wodurch der Sollfahrtring in der hier beschriebenen Form nicht mehr seine ursprüngliche Bedeutung hat.
Quellen
- Helmut Reichmann – Streckensegelflug, Motorbuchverlag, Stuttgart 2005, ISBN 3-613-02479-9
- John Cochrane – Ein bisschen schneller bitte, Deutsche Übersetzung, Original (englisch) (MS Word; 144 kB)
Einzelnachweise
- Liste der Segelflugweltmeister (Memento vom 6. Februar 2010 im Internet Archive) der FAI