omlox
omlox ist ein Technologiestandard, der eine technologie- und hersteller-unabhängige Bereitstellung von Ortungsdaten ermöglicht. Der Begriff omlox leitet sich aus den lateinischen Begriffen „omni“ = allgegenwärtig und „locus“ = Ort ab.
Der omlox-Standard beschreibt im Wesentlichen zwei Kernkomponenten:
- Eine Ortungs-Middleware („omlox hub“), die Ortungsdaten aus den verschiedenen Technologien zusammenführt und über standardisierte APIs weiteren Anwendungen zur Verfügung stellt.
- Eine offene Ortungsinfrastruktur („core zone“) auf Basis der Ultra-Wideband-Funktechnologie, in der Geräte hersteller-unabhängig geortet werden können oder sich selbst verorten.
Alle anderen Ortungstechnologien (wie RFID, BLE, WLAN etc.) werden nicht von omlox selbst standardisiert, sondern können als sogenannte „complementary zones“ an einen omlox hub angebunden werden. Der Technologiestandard wird von der Industrievereinigung PROFIBUS und PROFINET International betreut.
Zielsetzung
Omlox stellt der Industrie einen einfachen, schnellen und kostengünstigen Zugriff auf Echtzeitortungsdaten zur Verfügung. Dies ermöglicht auch mittelständischen Unternehmen, ihre Wettbewerbsfähigkeit durch den Einsatz von Ortungstechnologien zu steigern.[1]
Im industriellen Umfeld können Ortungsdaten in einer großen Bandbreite von Anwendungsfällen einen Wertbeitrag leisten. Nicht jede Ortungstechnologie ist für jeden Anwendungsfall gleich gut geeignet. Industrieunternehmen sind oft überfordert und Umsetzungen scheitern an der Komplexität und den damit verbundenen Kosten.
Durch die Standardisierung mit omlox reduziert sich die technische Komplexität von Ortungssysteme und damit der Aufwand. In einer Art Bausteinkasten können Kunden die für ihren Anwendungsfall passende Kombination an Ortungstechnologien und Anbietern auswählen. Standardisierte Schnittstellen erleichtern die Integration der Systeme beim Kunden und ermöglichen einfach spätere Erweiterung.
Anbieter von Ortungstechnologien werden durch omlox in die Lage versetzt, sich auf für sie relevante Leistungsaspekte zu konzentrieren und über Partnerschaften andere Teilkomponenten zu ergänzen. Dies umfasst dabei zum einen Produktaspekte wie Ortungshardware, Software-Bausteine und Anwendungen, aber auch die Bereiche Wartung und Betrieb.
Anwendungsfälle
Der Ortungsstandard omlox adressiert ein sehr breites Spektrum an Anwendungsfällen, die v. a. insbesondere in der Industrie und Logistik relevant sind. Zusammenfassend kann man dabei folgende Kategorien der Anwendungsfälle unterscheiden:
- Tracking von Dingen z. B. Produktionsmittel, Waren, Werkzeuge, Aufträge, Fahrzeugen oder Personen.
- Automatische Buchung und Dokumentation von Prozessfortschritten in IT Systemen z. B. für eine papierlose Produktion.
- Ortsbezogene Informationen und Steuerung z. B. für eine Maschinensteuerung oder die Wartung von Maschinen.
- Autonomer Transport z. B. bei der Orchestrierung des innerbetrieblichen Werksverkehr durch autonome Transportroboter.
- Sicherheitsbezogene Anwendungen z. B. im Alleinarbeiterschutz[2] in der Prozessindustrie.
Architektur im Überblick
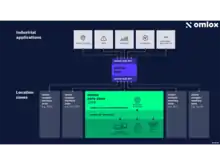
Omlox bezeichnet Ortungstechnologien, die verschiedene räumliche Bereiche in einer Fabrik abdecken als Zonen. Dabei unterscheidet omlox zwei verschiedene Arten von Zonentypen:
- Core zone – ist ein Bereich, in dem eine interoperables Ultrawide-Band System installiert ist, welches eine hersteller-unabhängige Ortung erlaubt. Der omlox-Standard definiert, wie Assets in Industrie-Umgebungen mit Hilfe der Ultra-Wideband-Technologie mit der notwendigen Genauigkeit geortet werden können.
- Complementary zone: Neben der Ultrawide-Band-Technologie gibt es eine Vielzahl weitere Technologien, die eine Ortung innerhalb oder außerhalb von Gebäuden erlauben. Dies sind beispielsweise WiFi, BLE, RFID oder zukünftig 5G. Da omlox auf diese Technologien keinen standardisierenden Einfluss nimmt, sondern diese nur einfach zugänglich macht, werden die Bereiche, in denen eine solche Technologie zum Einsatz kommt, als complementary zones benannt.
Oberhalb der Zonen werden die Ortungsdaten von einer Ortungsmiddleware, dem omlox hub, zusammengeführt. Dieser Hub stellt die Daten über einheitliche Schnittstellen und in einem einheitlichen Format verschiedenen Anwendungen zur Verfügung, beispielsweise dem Warenwirtschaftssystem, der Lagerverwaltung, der Produktionsplanung oder dem Transport-Management.
| Industrielle Anwendungen | Lagerverwaltung | Warenwirtschaftssystem | Produktionsplanung | Transport-Management | etc |
| Ortungs-Middleware | omlox hub
omlox hub API | ||||
| Ortungstechnologien | omlox core zone
UWB |
Complementary zone
RFID |
Complementary zone
BLE |
Complementary zone
SLAM |
Complementary zone
5G/GPS |
Ortungs-Middleware: omlox hub
Der omlox hub entkoppelt industrielle Anwendungen, die Ortungsdaten verarbeiten, von den eigentlichen Ortungstechnologien und deren Herstellern. Durch dieses Architektur-Prinzip einer Middleware wird die Integration von Ortungstechnologien in Anwendungen vereinfacht und eine beliebige Kombination von Technologien und Herstellern ermöglicht.
Der omlox hub aggregiert die Ortungsdaten, bringt diese in ein einheitliches Datenformat und stellt einige immer wieder benötigte räumliche Kernfunktionen bereit. Die Positionsdaten werden in 3D mit x-, y- und z-Koordinaten bereitgestellt. Über moderne APIs wird eine einfache Integration des omlox hub ermöglicht. Ein omlox hub ist als leichtgewichtige Software konzipiert, die auch die Anforderungen einer Echtzeitdatenverarbeitung der Automatisierung erfüllen kann.
Die Spezifikation des omlox hub kann bei Profibus und Profinet International (PI)[3] bezogen werden.
Trackable als bewegliches Objekt
In einem omlox hub können bewegende Dinge (Assets, Werkzeuge, Fahrzeuge, Personen) als Trackables beschrieben werden. Ein Trackable ist dabei durch einen eindeutigen Identifier, eine räumliche Ausdehnung, weiteren Attribut-Daten und der dynamischen Kombination verschiedener Ortungstechnologien charakterisiert. Je nach Anwendungsfall, räumlicher Konstellation oder vorhandener Ortungstechnologie können Ortungsdaten einem Trackable dynamisch über APIs zugewiesen werden. Software-Anwendungen können somit über eine API einfach den letzten bekannten Aufenthaltsort eines Trackables abfragen. Die tatsächliche Ortungstechnologie tritt dadurch in den Hintergrund und wird austauschbar.
Geo-Referenzierung
Ein omlox hub transferiert Ortungsdaten aus den verschiedenen, meist lokal installierten Zonen, auf ein globales Koordinaten-Referenzsystem. Damit erhalten industrielle Anwendungen immer einheitliche Daten und es wird ein nahtloses Outdoor-Indoor-Tracking ermöglicht. Je nach Anwendungsfall sind unterschiedliche Level an Ortungsgenauigkeit erforderlich und da eine omlox-hub-Anwendung in verschiedenen Ortungen auf der Welt zum Einsatz kommen kann, unterstützt ein omlox hub verschiedene Koordinaten-Referenzsystems. Dabei nutzt omlox die EPSG-Nomenklatur zur Beschreibung von Koordinaten-Referenzsysteme.
Ein omlox hub unterstützt auch den umgekehrten Weg, indem Positionsdaten von einer globalen Koordinate wieder auf ein lokal installiertes Ortungssystem, mit seinem lokalen Koordinatensystem, übersetzt werden kann.
Funktionsbereiche
Neben dem Konzept der Trackables und der Geo-Referenzierung unterstützt der omlox hub zwei räumliche Kernfunktionen, die in vielen Anwendungsfällen nützlich sind.
Fencing

Oft ist es von Interesse zu wissen, ob sich ein Objekt innerhalb oder außerhalb eines Bereiches (=Fence) befindet. Über die omlox hub API können Fences definiert werden und ein omlox hub berechnet, ob ein Trackable einen Fence betritt oder verlässt. Ein wesentliches Unterscheidungsmerkmal zu klassischen Ortungssystemen ist der Umstand, dass das Fencing ebenfalls unabhängig von der Ortungstechnologie funktioniert und technologie-übergreifende Fences definiert werden können. Um eine maximale Interoperabilität zwischen verschiedenen omlox-hub-Implementierungen zu gewährleisten, sind innerhalb von omlox auch die Rahmenparameter zur Berechnung eines Fence-Eintritts oder Austritts definiert, z. B. Zeitintervalle, um Schwankungen in den Ortungsdaten auszugleichen.
Kollisionen
Für viele Anwendungsfälle ist es ebenfalls von Interesse, die Distanz zwischen sich bewegenden Objekten berechnen zu können und eine Benachrichtigung bei Unterschreitung eines definierten Minimalabstandes zu erhalten. Dieses Verhalten ist innerhalb von omlox als Kollision-API definiert. Die Rahmenparameter, die eine Kollision definieren, sind innerhalb der Spezifikation abgebildet.
Schnittstellen
Zielstellung von omlox ist es, eine leichtgewichtige und schnelle Integration von Ortungsdaten zu ermöglichen, um auf Basis der standardisierten APIs auch die Software-Integrationskosten zu senken. Aus diesem Grund unterstützt omlox derzeit die folgenden Zugriffsmethoden
- Representational State Transfer (REST) API
- WebSocket API
Für eine kommende Version des omlox-Standards ist auch eine MQTT-Schnittstelle geplant. Die Daten innerhalb der omlox-hub-API werden in einer JSON-Notation beschrieben.
Das offene UWB-System: omlox core zone
Die omlox core zone ist ein offenes Echtzeitortungssystem (RTLS = real-time-location-system), dessen Spezifikation gemeinsam von allen omlox-Partnern[4] erarbeitet und weiterentwickelt wird. Es nutzt im Grundsatz eine Time-of-Flight-(ToF)-Messung von impulsförmigen Signalen, die drahtlos über Funkkanäle mit hoher Bandbreite und geringer Sendeleistung übertragen werden. Dies wird oft auch als IR-UWB (Impulse-radio ultra-wide-band) bezeichnet[5]. Die Spezifikation der omlox core zone ist über die Profibus und Profinet International (PI) Organisation zu erhalten[6] und unterliegt kontinuierlichen Anpassungen[7].
Ultra-wideband (auch: UWB oder deutsch Ultrabreitband) ist eine Nahbereichs-Funktechnik, die extrem große Frequenzbereiche mit einer Bandbreite von mindestens 500 MHz nutzt[8]. UWB arbeitet dabei mit einer niedrigen Sendeleistung (0,5 mW / −41,3 dBm/MHz), um bereits belegte Frequenzbereiche nicht zu stören. Nur spezielle UWB-Empfänger können das Signal erkennen. Der Frequenzbereich von Ultra-wideband liegt zwischen 3,1 und 10,6 GHz. Es liegt der Standard IEEE 802.15.4.z[9] zugrunde, der sich mit der Kommunikation von Sensoren und Aktoren in kabellosen Netzwerken beschäftigt.

Von anderen Echtzeitortungssystemen unterscheidet sich die omlox core-zone durch:
- Volle Herstellerunabhängigkeit dank standardisierter Funkschnittstelle
- Unlimitierte Anzahl von selbstortenden Objekten (keine Bandbreitenlimitierung)
- Deterministisches Verhalten dank zeitgetaktetem Systemverhalten
- Sehr robust dank echter Trilateration und Nutzung der 4-GHz-Bandgruppe
- Perfekt abgestimmt auf die Datenanbindung über den Omlox hub
Satelliten als Gebäudeinfrastruktur
Die Realisierung der omlox core-zone benötigt eine Gebäudeinfrastruktur. Konkret sind fest installierte Transmitter notwendig, die in Anlehnung an GPS als Satelliten bezeichnet werden. In omlox V2 sind dies drei unterschiedliche Typen von Satelliten:
- Full Blown Satellite (FBS) ist mit einer festen Energieversorgung ausgestattet und kann über ein zusätzliches Datennetzwerk mit lokalen Servern Informationen austauschen.
- Mains Powered Satellite (MPS) ist mit einer festen Energieversorgung ausgestattet und verfügt über keinen zusätzlichen Zugang zu einem Datennetzwerk.
- Battery Powered Satellite (BPS) wird über eine lokale Batterie gespeist und verfügt über keinen zusätzlichen Zugang zu einem Datennetzwerk.
Für eine Ortung sind mindestens drei Satelliten notwendig. Je nach Fläche und erforderlicher Genauigkeit sind weitere Satelliten erforderlich. Nur ein FBS kann die Informationen einsammeln und an einen lokalen Server weiterleiten. Je nach eingesetzter Messmethode müssen unterschiedliche Satelliten eingesetzt werden. In omlox V1 werden nur FBS eingesetzt.
Tags für die beweglichen Objekte
Ein Tag ist ein omlox-kompatibler Transmitter, der auf einem zu lokalisierenden, beweglichen Gerät oder Resource montiert ist. Beim ersten Eintritt eines solchen Tags in eine omlox core zone wird eine Onboarding-Prozedur gestartet. Der Tag wird erkannt und im System registriert. Nach der Registrierung erhält er einen Zeitslot, in dem er über die UWB-Funkstrecke vermessen wird. Sowohl Onboarding-Prozedur als auch die UWB-Ortung sind bei omlox standardisiert.
Ein Tag kann die folgenden Rollen annehmen:
- Transceiver Tag (TRxT) kann senden und empfangen.
- Transmitter Tag (TxT) kann nur senden
- Receiver Tag (RxT) kann nur empfangen
Messmethoden zur Ortsbestimmung
Mit den unterschiedlichen Satelliten und Tags können verschiedene Messmethoden zur Ortsbestimmung realisiert werden:
- Downlink Time Difference of Arrival (DL TDOA): Ein Tag kann die Signale der umgebenden synchronisierten Satelliten messen und somit über TDOA und den bekannten Positionen der Satelliten seine eigene Position bestimmen. Diese Methode ist vergleichbar mit der GPS-Technik.
- Uplink Time Difference of Arrival (UL TDOA): Ein Tag sendet regelmäßig Signale und erlaubt damit den synchronisierten Satelliten die ToA (Time of Arrival, englisch für Ankunftszeit) zu bestimmen. Mit diesen gesammelten Ankunftszeiten kann ein Location-Server aus den Differenzen der ToA und den bekannten Positionen der Satelliten die Position des Tags abgeschätzten.
- Reconstructed Time of Flight (RToF): Nicht nur die Satelliten, sondern auch der Tag wird mit einer Zweiwegkommunikation genau synchronisiert. Somit kann neben der Ankunftszeit auch die Sendezeit gemessen und somit die Übertragungszeit (ToF = Time of Flight) berechnet werden. Mit diesen berechneten ToF kann nun ein Location-Server die Position des Tags bestimmen.
- Timestamped Time of Flight (TsToF): Auch hier werden alle Satelliten und Tags synchronisiert. Der Tag tauscht mit allen Satelliten Signale aus, die auch die Sendezeit der Signale enthalten. So wird die genauste Bestimmung der Position auf bis zu 10 bis 30 cm möglich.
| Methode | Zielsetzung | Satelliten | Tags |
|---|---|---|---|
| DL TDOA (wie GPS) | Eigene Verortung | FBS, MPS, BPS | RxT, TRxT |
| UL TDOA | Tracking | FBS | TxT, TRxT |
| RToF | Tracking | FBS, MPS | TRxT |
| TsToF | Tracking | FBS, MPS | TRxT |
Complementary Zones
Innerhalb einer omlox-Architektur lassen sich alle weiteren Ortungstechnologien – als komplementäre Ortungszonen – an einen omlox-Hub anbinden.
Weitere Ortungstechnologien können z. B. sein
- Satellitenbasierte Ortungstechnologien wie z. B. GPS, Galileo, GLONASS etc.
- Bluetooth-basierte Ortungstechnologien
- RFID-basierte Identifikation und Ortung
- Optische Ortung über kamera-basierte Systeme
- Ultraschall-basierte Ortung
- Magnetfeld-basierte Ortung
Das offene Architekturkonzept von omlox – auf Basis der verschiedenen Zonen (core zone und complementary zones) und deren Einbindung an einen omlox-Hub – erlaubt eine ganzheitliche, transparente Ortung über Technologiegrenzen hinweg. omlox ist somit
- Retro-Fit-fähig, können doch bereits vorhandene Ortungstechnologien weiter genutzt werden.
- Zukunftsfähig: da weitere Ortungstechnologien an einen omlox hub angebunden werden können, ohne dass sich das Gesamtsystem grundlegend ändert.
Geschichte
Der Start für die offene Ortung wurde Anfang 2018 durch die Firma TRUMPF Werkzeugmaschinen GmbH + Co. KG initiiert. Hintergrund war, dass alle damals verfügbaren Ortungssysteme proprietär waren und dadurch wegen des lock-ins nicht breit eingesetzt werden konnten. Die Firma TRUMPF hat daraufhin weitere Unterstützer einer offenen Ortung gesucht und konnte schnell über 20 Firmen im deutsch-französischen Raum gewinnen. Unter dem Arbeitstitel „initiative LoTUS“ hat dieser lockere Verbund dann die Lasten und Leistungsdaten eines solchen offenen Systems erarbeitet und anschließend in einer agilen Entwicklung realisiert. Nach der erfolgreichen Erprobung wurde dann der erste Standard abgeleitet und das Ergebnis im Juni 2020 an die PI übertragen.[10]
Weblinks
- omlox Organisation, Informationen zu omlox (englisch)
- PI: omlox Beschreibung, Technische Übersicht (englisch)
- Maschinenmarkt: So funktioniert omlox, Kompakte Beschreibung auf Deutsch
Einzelnachweise
- Wie das standardisierte Ortungssystem omlox die Lücke bei der Indoor-Lokalisierung schließt. Abgerufen am 30. November 2021.
- Alleinarbeiterschutz mit GPS und Indoor-Ortung. Abgerufen am 6. Dezember 2021.
- omlox HUB Specification API and Behavior. In: PI Specification. Profinet International, 17. Juni 2021, abgerufen am 25. November 2021.
- omlox Partner. Abgerufen am 25. November 2021.
- Ultra-wideband als Standard für die Indoor-Ortung. Abgerufen am 25. November 2021.
- omlox Core Zone Specification. In: PI Specification. Profinet International, 5. Oktober 2021, abgerufen am 25. November 2021.
- Die aktuelle Version 1.x des omlox Standards wurde vor der Standardisierung von UWB-Chips innerhalb von IEEE802.15.4z erarbeitet und benötigt einen definierten Chipsatz. Die Version 2.x des omlox Standards ist im 2021 erst als Entwurf verfügbar und enthält als Basis den neuen UWB Standard IEEE802.15.4z.
- Ultra wideband Indoor Localization Technologie. Abgerufen am 25. November 2021.
- IEEE 802.15.4z-2020 - IEEE Standard for Low-Rate Wireless Networks--Amendment 1: Enhanced Ultra Wideband (UWB) Physical Layers (PHYs) and Associated Ranging Techniques. In: 802 Standard. IEEE, abgerufen am 25. November 2021.
- omlox: Alles Wissenswerte über die neue Ortungstechnologie. Abgerufen am 30. November 2021.