Modellbahndecoder
Bei einem Modelleisenbahndecoder handelt es sich um eine Dekodierer-Komponente der digitalen Modelleisenbahnsteuerung, die die genormten digitalen Steuerbefehle in die entsprechenden analogen Schaltungen umwandelt.
Neben den großen Modellbahnherstellern gibt es einige kleinere Firmen, die sich speziell auf die Herstellung dieser Komponenten spezialisiert haben, bzw. die Hersteller damit beliefern.
Wegen der Spezifikationsunterschiede bei den zwei großen Systemen DCC und Märklin-Motorola (MM) sind auch die Decoder unterschiedlich. Es gibt Zentralen, die zumindest bei den Zubehördecodern beide Systeme unterstützen, indem sie einfach alle Befehle doppelt senden (z. B. Roco Multimaus). Einige Decoder akzeptieren auch beide Formate oder lassen sich mittels Jumper einstellen. Anderenfalls muss der Decoder zur Zentrale passen.
Je nach zu steuernder Komponente unterscheidet man unterschiedliche Typen.
Lokdecoder
Bei der analogen Modellbahn erhält die Lokomotive den entsprechend geregelten Fahrstrom schon durch die Schienen, nur das Licht wird eventuell "an Bord" umgeschaltet. Bei der digitalen Modellbahn übernimmt der Lokdecoder den Part des Lokomotivführers, wie im Original direkt in der Lokomotive, indem er die von den Schienen abgenommenen digitalen Signale verarbeitet und den konstanten Fahrstrom entsprechend geregelt auf die Motoren und Zusatzfunktionen verteilt. Wie im Vorbild steht auf der gesamten Strecke allen Fahrzeugen eine konstante Spannung zur Verfügung, der Locdecoder kann daher auch bei Stillstand Funktionen (z. B. das Licht) schalten.
Daraus ergibt sich neben der Unterscheidung nach der Kommunikationsart auch jene zwischen Gleich- und Wechselstromsystem. Inzwischen arbeiten allerdings die meisten Decoder automatisch mit dem DCC- und dem MM-Protokoll. Ein großer Unterschied zwischen den beiden Protokollen ist die Anzahl der möglichen Fahrstufen, die eingestellt werden können: MM: 14/27, DCC: 14/28/128. Auf jeden Fall nicht umschaltbar ist die Stromversorgung, sodass es hier von den Herstellern immer eigene Typen für Gleich- und Wechselstrom gibt.
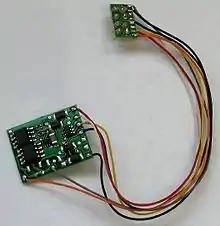
Viele Hersteller von Fahrzeugen verzichten auf die Auslieferung eigener Decoder und überlassen es dem Käufer, die Module nach Wunsch einzubauen. Dazu werden alle neuen Lokomotiven mit einer genormten NEM-Schnittstelle ausgestattet. Lokomotiven sind so verdrahtet, dass sie ohne Decoder mittels eines Brückensteckers an der NEM-Schnittstelle auch analog betrieben werden können. Wird ein Decoder eingebaut, erfolgt die Ansteuerung der Motoren und Lampen über diesen.
Die Belegung der Kontakte und die empfohlenen Kabelfarben für den 8-poligen Decoderstecker sind laut NEM-652 folgendermaßen definiert:[1]
| PIN | Beschreibung | Farbe | PIN | Beschreibung | Farbe |
|---|---|---|---|---|---|
| 1 | Motoranschluss rechts | orange | 8 | Stromabnehmer rechts | rot |
| 2 | Beleuchtung hinten | gelb | 7 | Pluspol für Verbraucher | blau |
| 3 | Zusatzfunktion F1 | grün | 6 | Beleuchtung vorne | weiß |
| 4 | Stromabnehmer links | schwarz | 5 | Motoranschluss links | grau |
Die aktuellen Decoder sind in der Lage, auch analoge Steuerung selbstständig zu erkennen und 1:1 weiterzuleiten. Dies ist auch während des Betriebs möglich, sodass die Kombination von analogen und digitalisierten Anlageteilen möglich ist. Dazu ist jedoch in der Strecke ein Übergangsstück notwendig, das dafür sorgt, dass beide Stromkreise auch bei langen Lokomotiven getrennt bleiben.
Standardmäßig werden die Motoren geregelt und die Fahrbeleuchtung, die man gezielt ein- und ausschalten kann, richtungsabhängig gesteuert. Abhängig vom Funktionsumfang können noch weitere Funktionen geschaltet werden: Kupplungen, Geräuschmodule usw.
Einstellung (Programmierung)

Damit die Befehle an der richtigen Lok ankommen, hat jeder Decoder eine eigene Adresse, unter der er erreichbar ist. Diese wird bei alten Decodern mit Jumpern, bei neueren Decodern manuell über die Zentrale oder in manchen Fällen auch automatisch eingestellt. Die Standardadresse nach der ersten Inbetriebnahme ist für gewöhnlich 3. Auch weitere Eigenschaften des Lokdecoders können parametrisiert werden, sodass gewisse Fahreigenschaften von Lokomotiven realistisch nachgestellt werden. Dazu gehören z. B. Beschleunigung und Bremsverzögerung. Während sich bei einer analogen Steuerung die Geschwindigkeitsänderungen unmittelbar auswirken, reagieren digitale Decoder auf einen Fahrstufen-Befehl laut eingestellter Beschleunigungsrate mit einer entsprechend verzögerten Geschwindigkeitsänderung. Damit fährt ein Modell einer Dampflok bei gleichem Geschwindigkeitsbefehl ohne Zutun der Zentrale langsamer an als eine Nachbildung eines TGV. Auch Minimal- und Maximalgeschwindigkeit, Helligkeit der Beleuchtung und die Zusatzfunktionen können verändert werden. Man spricht dabei fälschlich von der "Programmierung" des Decoders, es werden jedoch nur einzelne Registerwerte eingestellt, die Programmlogik des Decoders ist fix. Diese einstellbaren Registerplätze werden Konfigurationsvariablen, kurz CV, genannt. Jede CV hat eine bestimmte Funktion, die sich je nach darin gespeichertem Wert verhält. Die Programmierung kann entweder gezielt auf einer Lokomotive auf der Anlage oder auf dem Programmiergleis erfolgen. Auf dem Programmiergleis lassen sich sämtliche Einstellungen, auch die der Adresse ändern, betroffen sind jedoch alle Fahrzeuge, die sich auf dem Gleis befinden. Bei der Methode "Programmierung auf dem Hauptgleis" (POM) wird die Lokomotive direkt mit der Adresse angesprochen und unabhängig von den anderen verstellt, jedoch ist in diesem Fall keine Änderung der Adresse möglich. Als Bestätigung eines Programmierbefehls reagiert der Decoder mit einem Aufblinken der Lichtausgänge oder in manchen Fällen mit einem kurzen Motorimpuls ("zucken").

Die wichtigsten und allgemein gültigen CVs sind laut NMRA:[2]
| CV | Werte | Standard | Bedeutung | Besonderheit |
|---|---|---|---|---|
| 1 | 0 - 127 | 3 | Adresse | bei manchen Decodern nur bis 99 |
| 2 | 0 - 255 | - | Startspannung | Spannung bei Fahrstufe 1 |
| 3 | 0 - 255 | - | Beschleunigung | Wartezeit bis zur nächsthöheren Fahrstufe |
| 4 | 0 - 255 | - | Verzögerung (Bremsrate) | Wartezeit bis zur nächstniedrigeren Fahrstufe |
| 5 | 0 - 255 | 0 | Maximalspannung | Spannung bei höchster Fahrstufe (Maximalgeschwindigkeit) |
| 6 | 0 - 255 | 1 | Mittlere Spannung | Spannung bei mittlerer Fahrstufe (mittlere Geschwindigkeit) |
| 7 | 1 - 255 | - | Versionsnummer | nur Lesen |
| 8 | 0 - 255 | - | Herstellernummer | Setzen eines bestimmten Wertes löst Reset aus (je nach Hersteller) |
| 9 | 0 - 255 | 0 | PWM-Periode | Wert für die Pulsweitenmodulation (Motoreigenschaft) |
| 17,18 | 1 - 10239 | - | lange Adresse | Wert für die erweiterte oder lange Adresse |
| 19 | 0 - 127 | - | Consist-Adresse | Aktivierung lange Adresse, Mehrfachtraktion |
| 28 | 0 - 255 | - | BiDi | Werte für bidirektionale Kommunikation |
| 29 | 0 - 255 | - | Konfiguration | Fahrtrichtung, Anzahl der Fahrstufen, Analogbetrieb … |
Danach folgen noch Werte für die Einstellung der Funktionen und individuelle Geschwindigkeitskennlinien. Auch wenn die Standard-CV-Nummern definiert sind, verwendet jeder Decoder bei bestimmten CVs andere Einstellwerte z. B. für die Geschwindigkeitswerte.
Umbau (nachträgliche Digitalisierung)

Nachdem eine analoge und eine digitale Lokomotive elektrisch gleich funktionieren, ist es auch möglich alte analoge Modelle auf Digitalsteuerung umzubauen, wenn die Motoren nicht zu alt sind. Zu beachten ist dabei, dass die maximale Stromaufnahme, die der Decoder verträgt, nicht überschritten wird. Je nach Modell muss aber erst ein Platz für den Decoder gefunden oder durch Abschleifen von Beschwerungsgewichten geschaffen werden.
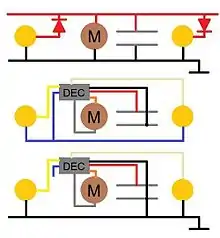
Der Anschluss erfolgt zwischen Stromabnehmer und Motor(en) bzw. Lampen. Ein Problem kann bei alten Modellen sein, dass es früher oft eine elektrische Masse gab, an die sowohl ein Stromabnehmer als auch ein Motorkontakt und auch ein Lichtkontakt direkt angeschlossen waren. Bei Gleichstromlokomotiven erfolgt der Lichtwechsel oft durch einfache Dioden, die je nach Fahrtrichtung die Lampen ein- und ausschalten. Je nach Decoder kann eine Trennung zwischen Verbrauchern und Zuleitung notwendig sein. Ist dies der Fall muss die gemeinsame Masse durch Isolierung der einzelnen Stromkreise aufgelöst werden. Manchmal ist der Motor oder ein Stromabnehmer durch stromführende Verbindungen mit der Masse so untrennbar verbunden, dass dadurch der Stromkreis für die Masse vorgegeben ist. Es kann auch notwendig sein, metallisches Befestigungsmaterial durch Kunststoffteile zu ersetzen. Dioden für die Beleuchtung müssen jedenfalls entfernt werden, da die Steuerung nun durch den Decoder erfolgt; ob vorhandene Spulen zur Entstörung ausgebaut werden müssen, hängt vom Decodertyp ab. Kann ein Decoder seine Funktionsausgänge auch mit gemeinsamer Masse ansteuern, dann liegt diese auf einer der Zuleitungen (schwarz). In diesem Fall darf die gemeinsame Rückleitung (blau) nicht angeschlossen werden. So eine gemeinsame Masse führt jedoch bei der angeschlossenen Beleuchtung zu einem Flackern im Fahrbetrieb, da sich die Schwankungen in der Stromübertragung direkt auf die Leuchtmittel auswirken. Diese Schwankungen treten nur bei Steuerung im Motorola-Format auf und werden deher "Motorola-Flackern" genannt. Eine komplett isolierte Beleuchtung mit Verwendung des gemeinsamen (blauen) Rückleiters vermeidet dieses Problem. Zu beachten ist, dass Kurzschlüsse durch schlechte Verdrahtung oder mangelhafte Isolierung zur Zerstörung des Decoders führen können. Auch wenn viele Decoder mit Überlastungsschutz ausgestattet sind, werden oft nicht alle Ausgänge abgesichert.
Zu berücksichtigen ist auch, dass Decoder bei Belastung warm werden und diese Wärme auch abgeführt werden muss. Anderenfalls kann es zur Überhitzung und/oder Verformung von Kunststoffteilen des Gehäuses kommen.
Zubehördecoder
Decoder für Zubehörartikel hängen am selben Datenbus wie die Lokomotivsteuerung, benutzen aber einen eigenen Adressenbereich. Im Allgemeinen werden Adressen in Viererblöcken vergeben. Die Moduladressen beginnen bei 1, jedes Modul hat 4 Ports mit je zwei Ausgängen (Gates), die 2 Zustände haben können (ON/OFF). Für die Gates werden auch die Bezeichnungen ROT und GRÜN verwendet, wie sie an den alten Weichenschaltern üblich sind. Je nach Zentrale werden die Adressen auf verschiedenen Ebenen angesprochen. Auf den Steuergeräten wird meist die direkte Portadresse (PADA) angezeigt, die flache Adressierung (FADA) wird selten verwendet. Nur beim System der Firma Lenz Digital, das auch von Roco verwendet wird, beginnt die Moduladresse mit 0. Dadurch sind die Adressen beim Zugriff mit anderen Zentralen um 4 Ports verschoben.[3]
Beispiel für die Adressierung des 2. Gates des 2. Ports im 1. Modul und des 1. Gates des 4. Ports im 2. Modul je nach verwendeter Zugriffsebene:[4]
| Adressierung der einzelnen Module | laut NMRA | MADA (Modul) | PADA (Port) | Lenz (Port) * | FADA (flat) | ||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Modul 1 | Modul 2 | 1 | 2 | 1 | 2 | 1 - 4 | 5 - 8 | 5-8 | 9 - 12 | 1 - 8 | 9 - 16 | ||||||||||||||
| Port 0 | Port 1 | Port 2 | Port 3 | Port 0 | Port 1 | Port 2 | Port 3 | 1,1 | 2,3 | 1,2 | 2,4 | 2 | 8 | 6 | 12 | 3 - 4 | 15 - 16 | ||||||||
| Gate 0 | Gate 1 | Gate 0 | Gate 1 | Gate 0 | Gate 1 | Gate 0 | Gate 1 | Gate 0 | Gate 1 | Gate 0 | Gate 1 | Gate 0 | Gate 1 | Gate 0 | Gate 1 | 1,1,1 | 2,3,0 | 1,2,1 | 2,3,0 | 2,1 | 2,0 | 6,1 | 12,0 | 4 | 15 |
*) Da bei Lenz digital das erste Modul die Nummer 0 hat, wären die zwei in diesem Beispiel bereits das 2. und 3. Modul.
Einstellung (Programmierung)
Heute werden die Decoderadressen meist eingelernt, indem der Decoder in einen Lernmodus versetzt wird. Dies geschieht mit einer Taste oder einem Jumper. Danach übernimmt der Decoder die Adresse, die im Block jener Adresse liegen, an die der folgende Schaltbefehl der Zentrale geht. Dazu wird einfach eine Weichentaste o. Ä. gedrückt. Als Bestätigung blinkt eine eigene LED oder der erste angeschlossene Verbraucher (Weiche, Signal). Danach wird der Lernmodus wieder beendet und die Adresse bleibt gespeichert. Die Adresse kann beliebig oft geändert werden, die Vergabe der Blöcke muss auch nicht fortlaufend erfolgen.
Manche Decoder, z. B. Open-DCC-Decoder, unterstützen auch eine Programmierung von CVs, sodass neben der Adresse noch spezielle Parameter eingestellt werden können. Nicht alle Zentralen unterstützen aber diesen Zugriff auf Zubehördecoder.
Anschluss
Der Strom für die jeweiligen Schaltartikel kann, muss aber nicht, derselbe wie der Steuerstom sein. Da "Digitalstrom" wegen der notwendigen Komponenten "teuer" ist, ist es oft von Vorteil, diesen Stromkreis zu schonen und einen eigenen einfachen Transformator für den Schaltstrom zu verwenden. Wählt man für den Steuerstrom einen eigenen Digitalkreis (Booster), kann man den Fahrstrom abschalten, ohne die Steuerung der Komponenten zu verlieren.
Die meisten Decoder schalten den Schaltstrom nach einer gewissen Zeit ab, auch wenn kein Aus-Befehl kommt. Dies ist aber nicht laut DCC-Standard. Unterstützt wird das von den Zentralen, die einen Ein-Befehl solange wiederholen, wie die Taste auf der Steuereinheit gedrückt wird und keinen Aus-Befehl senden.
Manche Hersteller rüsten ihre Weichen gleich mit einem eingebauten Decoder aus, wodurch die Verkabelung wegfällt. Steuer- und Schaltstrom kommen dabei aus den Schienen.
Decoderarten
Je nach Einsatzgebiet gibt es eigene Decoder, die alle gleich angesprochen werden, jedoch unterschiedliche Schalteigenschaften haben.
Magnetartikeldecoder

Magnetartikeldecoder steuern Artikel, die mit einem Stromstoß an jeweils einem Ausgang schalten. Analog wird dafür meist Wechselspannung verwendet, Decoder senden wegen der elektronischen Bauteile Gleichspannung. Versorgt werden mit den 4 Adressen 8 einzelne Ausgänge. Damit können 4 Weichen mit 2 Stellungen oder 8 Entkuppler gesteuert werden.
Decoder für motorische Weichen
Motorische Weichen haben oft nur zwei Anschlüsse, die umgepolt werden. Daher benötigen sie einen eigenen Dekodertyp mit nur 4 Anschlusspaaren. Wie bei Magnetartikeldecodern schalten auch die meisten Weichendecoder nach einer gewissen Zeit ab, auch wenn kein Aus-Befehl kommt.
Schaltdecoder
Für das Ein- und Ausschalten von anderen Verbrauchern benötigt man einen Decodertyp, der Spannungen ein- und ausschalten kann und den Eingang bis zum Aus-Befehl offenhält. Obwohl mit 4 Adressen 8 Gates geschaltet werden können, verfügen einige Schaltdecoder wegen der automatischen Abschaltung nur über 4 bistabile Relais, sodass nur 4 Verbraucher angeschlossen werden können.
Signaldecoder

Für die Steuerung von Signalen gibt es spezielle Schaltdecoder, die mit einem Schaltbefehl je Signalbegriff gleich das jeweils richtige Signalbild anzeigen. Die Umschaltung erfolgt dabei weich durch Auf- und Abblenden. Diese Decoder können mit 4 bis 8 Adressen 2 bis 4 Signale steuern und haben wegen der Logik für die Ansteuerung der einzelnen Lampen einen Programmchip, der eventuell je nach Signalsystem bzw. Land (Bahngesellschaft) unterschiedlich sein kann. Standarddecoder unterstützen ein oder zwei Signalpaare (Hauptsignal und Vorsignal am selben Mast) mit 7 Begriffen. Für ein Signal werden dann 4 Ports für 4 Begriffe verwendet (Rot = Halt, Grün = Frei, Gelb = Langsamfahrt, Weiß = Rangierfahrt). Manche Decoder sind mit einem eigenen Signalbus ausgestattet, der zur Verbindung mehrerer Decoder dient und z. B. automatisch Vorsignale analog zu Hauptsignalen stellt.
Spezialdecoder für Drehscheiben, Schiebebühnen usw.
Für die speziellen Abläufe bei komplex gesteuerten Anlagen wie Drehscheiben und Schiebebühnen werden eigene Decoder mit der entsprechenden Steuerlogik angeboten.
Im Prinzip können sämtliche Steuerungen mit einfachen Schaltdecodern gemacht werden, die zusätzliche Logik (Endabschaltung, Dunkelschaltung von Vorsignalen, Drehscheibensteuerung …), ist dann durch zusätzliche Relais, Elektronik oder von einem Computer zu erledigen.
Seilbahndecoder
2012 brachte die österreichische Jägerndorfer Ges.m.b.H. einen eigenen Decoder für die von ihnen produzierte H0-Modellseilbahn heraus. Damit lassen sich die verschiedenen Funktionen der Bahn steuern und diverse Betriebsgeräusche wiedergeben.[5] Brawa stellte daraufhin einen ähnlichen Baustein für ihre Seilbahnen auf der Nürnberger Spielwarenmesse 2013 vor.[6]
Rückmeldemodule
Für die Meldung von Weichenstellungen, besetzten Gleisen und aktuellen Standorten von Zügen werden auf verschiedenste Weise Rückmeldungen in Form von Kontakten benötigt. Deren Zustand wird durch eigene Module verarbeitet und an die Steuereinheit, meist einen PC, gesendet. Diese fälschlich auch als Rückmeldedecoder bezeichneten Bausteine sind jedoch Encoder, weil sie die analogen Impulse in digitale Informationen umwandeln. Sie werden auch an einen eigenen Bus angeschlossen. Der gängigste Typ ist dabei das S88-Rückmeldebussystem.
Einzelnachweise
- NEM-652 (PDF; 16 kB), MOROP
- COnfigation Variablen, OpenDCC
- Beschreibung Servodecoder (PDF-Datei; 376 kB), Firma Joka electronic
- Adressierung, Rocrail
- Seilbahn Sounds H0 2012, Jägerndorfer
- Für Gipfelstürmer – die Hahnenkammbahn in Spur H0, BRAWA im Oktober 2012