Laser surface velocimeter
Ein laser surface velocimeter (LSV, englisch) ist ein berührungsloses optisches Messgerät zur Bestimmung von Geschwindigkeit (ein Velozimeter) und, daraus abgeleitet, der Länge auf sich bewegenden Oberflächen (engl. surface). LSVs arbeiten nach dem Laser-Doppler-Prinzip und werten dabei das von einem bewegten Objekt zurück gestreute Laserlicht aus. Sie werden weit verbreitet zur Fertigungskontrolle in industriellen Prozessen eingesetzt.
Funktionsprinzip
Das Differenz-Doppler-Verfahren
Der Dopplereffekt beschreibt, wie der Bewegungszustand eines Beobachters oder Empfängers das Ergebnis einer Frequenzmessung an einer Lichtwelle beeinflusst, die sich im ruhenden Bezugssystem mit der Geschwindigkeit c einer Wellenlänge λ und einer Frequenz f ausbreitet, wenn sich der Beobachter oder Empfänger mit der Geschwindigkeit v gegenüber dem ruhenden Bezugssystem bewegt. Die für kleine Geschwindigkeiten zulässige nicht-relativistische Betrachtung ergibt, dass der Beobachter eine Frequenz f‘ misst, die in folgendem Zusammenhang mit seiner Geschwindigkeit v steht:

Die vorangehende Analyse ist eine Näherung für im Vergleich zur Lichtgeschwindigkeit kleine Geschwindigkeiten, die praktisch für alle technisch relevanten Geschwindigkeiten sehr gut erfüllt ist.
Die Messaufgabe an den bewegten Objekten, die prinzipiell beliebig lang sein können, erfordert einen Messaufbau mit einer Beobachtungsachse des Sensors senkrecht zur Bewegungsrichtung des Messobjektes.
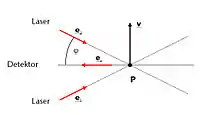
LSVs arbeiten nach dem so genannten Differenz-Dopplerverfahren. Hierbei werden zwei Laserstrahlen, die jeweils unter einem Winkel φ zur optischen Achse einfallen, auf der Oberfläche des Messobjektes überlagert. Für einen Punkt P, der sich mit der Geschwindigkeit v durch den Schnittpunkt der beiden Laserstrahlen bewegt, sind die Frequenzen der beiden Laserstrahlen gemäß der obigen Formel Doppler-verschoben. Am Punkt P des Messobjektes, das sich mit der Geschwindigkeit v bewegt, treten somit folgende Frequenzen auf:

- = Einheitsvektoren der Laserstrahlen 1 und 2 und in Richtung Detektor

- f1,2 = Frequenzen der Laserstrahlen 1 und 2
- fP1,P2 = Doppler-verschobene Frequenzen der Laserstrahlen 1 und 2 im Punkt P
Der Punkt P emittiert nun Streuwellen in Richtung des Detektors. Da sich P mit dem Messobjekt bewegt, ist die in Richtung des Detektors emittierte Streustrahlung ebenfalls dopplerverschoben. Für die Frequenz der Streuwellen in Richtung des Detektors gilt somit:


Die Streuwellen überlagern sich auf dem Detektor. Durch Interferenz der Streuwellen aus den beiden Laserstrahlen kommt es in der Überlagerung zu verschiedenen Frequenzkomponenten. Messtechnisch ausgewertet wird die niederfrequente Schwebungsfrequenz der überlagerten Streustrahlen, die der Dopplerfrequenz fD entspricht. Diese ergibt sich bei gleicher Frequenz (gleicher Wellenlänge) der beiden einfallenden Laserstrahlen als Differenz von fe2 und fe1 zu:

Bei senkrechter Bewegung des Punktes P in Bezug auf die optische Achse und bei gleichem Einfallswinkel φ gilt:

und

Damit erhält man schließlich:

Die Dopplerverschiebung ist also direkt proportional zur Geschwindigkeit. Eine anschauliche Erklärung, die zum selben Ergebnis führt, ist die folgende:
Anschauliche Darstellung
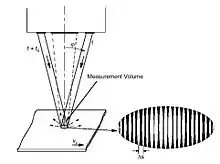
Die beiden Laserstrahlen überlagern sich im Messvolumen, und erzeugen in diesem Raumgebiet ein Interferenzmuster von hellen und dunklen Streifen.
Der Streifenabstand Δs ist eine Gerätekonstante, die von der Laserwellenlänge λ und vom Winkel zwischen den Messstrahlen 2φ abhängt:

Bewegt sich ein Teilchen durch das Streifenmuster, so wird das von ihm zurückgestreute Licht in seiner Intensität moduliert.
Ein Photoempfänger im Messkopf erzeugt demzufolge ein Wechselstromsignal, dessen Frequenz fD direkt proportional zur Geschwindigkeitskomponente der Oberfläche in Messrichtung vp ist, und es gilt:

- fD = Dopplerfrequenz
- vp = Geschwindigkeitskomponente in Messrichtung
- Δs = Streifenabstand im Messvolumen
Das Heterodyn-Verfahren
LS-Velocimeter arbeiten im so genannten heterodynen Modus, das heißt, die Frequenz einer der Messstrahlen ist um einen Offset von z. B. 40 MHz verschoben. Die Streifen im Messvolumen wandern dadurch mit einer Geschwindigkeit entsprechend der Offsetfrequenz fB. Damit wird es möglich, die Bewegungsrichtung des Messobjektes zu erkennen, sowie bei der Geschwindigkeit Null zu messen. Die resultierende Modulationsfrequenz fmod am Photoempfänger beträgt im heterodynen Modus:

Die Modulationsfrequenz wird im Controller durch Fouriertransformation ermittelt und in den Messwert für die Geschwindigkeit vp umgewandelt. Die Längenmessung erfolgt durch Integration des Geschwindigkeitssignals.
Einsatzbereiche
LSVs finden ihren Einsatz bei der Zuschnittsteuerung im Heiß- und Kaltbereich, bei der Steuerung fliegender Sägen, bei der Stückgut-Längenmessung an Gipsplatten, Pappe, Holz oder Formblechen, sowie bei der Messung der Rollenlänge von Kabel, Draht, Textil, Papier, Pappe oder Folie. Geschwindigkeitsmessungen mit LSVs dienen der Prozesssteuerung in Kalt- und Warmwalzwerken, beispielsweise zur Reckgradmessung mit Hilfe von Differenz-Geschwindigkeitsbestimmungen, zur Messung von Elongation und Dressiergrad oder zur Massenflussregelung. Weiterhin ist auch eine Synchronisierung von Geschwindigkeiten möglich z. B. zur Schlupfmessung und -kompensation oder für Laminierprozesse.
Literatur
- Präzisionsarbeit unter extremen Bedingungen. In: QZ. Nr. 6, 2007, S. 37–39 (online).
- S. Musielak: Geschwindigkeitsmessung in der Wellpappenindustrie – Berührungslose Geschwindigkeitsmessung im Vergleich zu konventionellen Messmethoden. In: Sensor Magazin Nr. 2, 2011, S. 8–11.
- W. Stork, A. Wagner, J. Drescher, K. D. Mueller-Glaser: Miniaturisiertes Laser-Doppler Velocimeter für die Geschwindigkeits- und Längenmessung an bewegten Festkörperoberflächen. In: Laser Magazin. Nr. 4, 1995 (online).
Weblinks
- Peter M. Nawfel: Laser based, noncontact speed sensor helps reduce breaks on high speed unwind. TAPPI, 2004.
- Funktionsprinzip der Laser Surface Velocimetrie