Hardiman (Exoskelett)
Der Hardiman war der erste Prototyp eines künstlichen Exoskeletts von General Electric aus dem Jahr 1965. Dem Träger des Hardiman sollte es ermöglichen bis zu 680 kg schwere Lasten mit Leichtigkeit zu heben. Das Projekt scheiterte, da die kontrollierte Benutzung des Exoskeletts nicht gelang.
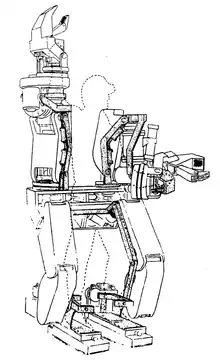
Jeder Versuch das Exoskelett zu benutzen, resultierte in unkontrollierten Bewegungen und es war für den Bediener nicht möglich, sich auf der Stelle zu drehen. Weitere Forschungsarbeiten konzentrierten sich danach lediglich auf einen Greifarm. Auch wenn er 340 kg schwere Lasten hob, wog der Greifarm eine dreiviertel Tonne, also mehr als das Doppelte der zu tragenden Last. Da die Komponenten des Hardiman nicht richtig zusammenarbeiteten und kein praktischer Nutzen von ihm ausging, wurde das Projekt eingestellt.
Heute wird in den USA und Japan an solchen künstlichen Exoskeletten für das Militär (bspw. das Berkeley Lower Extremity Exoskeleton[1]) und für zivile Einsatzbereiche (bspw. das Exoskelett HAL-5[2]) wieder weiter geforscht.
Weblinks
- Der Hardiman (englisch)
- General Electric: The Story Behind the Real ‘Iron Man’ Suit (englisch)
- General Electric: Dokumentation "Hardiman 1 Project" (englisch, PDF; 1,3 MB)
Einzelnachweise
- http://www.berkeley.edu/news/media/releases/2004/03/03_exo.shtml The Berkeley Lower Extremity Exoskeleton (BLEEX) (engl.)
- Archivlink (Memento des Originals vom 26. November 2013 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis. Cyberdyne - Robot Suit HAL (engl.)