Ground Proximity Warning System
In einem mit einem Ground Proximity Warning System (dt.: Bodenannäherungs-Warnsystem) ausgerüsteten Luftfahrzeug werden in niedriger Flughöhe unter 762 m Radarhöhe (2500 ft) aus verschiedenen Daten Kriterien abgeleitet, bei deren Unterschreitung ein Alarm im Cockpit ausgelöst wird.
Geschichte
Das System wurde Ende der 1960er Jahre bei Honeywell International unter Leitung von C. Donald Bateman entwickelt, 1975 eingeführt und war eine Antwort auf sogenannte CFIT-Unfälle, bei denen ein ansonsten voll funktionsfähiges Flugzeug „in den Boden“ geflogen wurde. Das GPWS arbeitet in einem Betriebsbereich von 9 m bis 747 m Höhe über Grund (Radarhöhe). Fünf verschiedene Bedingungen (modes, Betriebsarten) führen bei Überschreitung unterschiedlicher Grenzen zu Warnungen.
Weiterentwicklung
Das System wurde zum Enhanced Ground Proximity Warning System EGPWS ausgebaut.
Durch Positionsbestimmung mit Satelliten und eine Geländedatenbank wird nicht nur die aktuelle Höhe über Grund, sondern die gesamte Flugbahn über Grund der nächsten 60 Sekunden berechnet. Dadurch können Kollisionen mit steilen Berghängen deutlich zeitiger erkannt werden (z. B. 60 Sekunden mit EGPWS statt 6 Sekunden des GPWS des Air-New-Zealand-Fluges 901).
GPWS-Modi

In allen Modi, ausgenommen Mode 6, werden Warnungen sowohl akustisch als auch visuell ausgegeben. Die ersten beiden Warnungen gibt es in zwei Ausführungen abhängig von der Kritikalität.
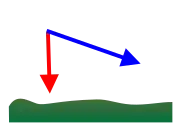
- Mode 1: Gefährliche Sinkgeschwindigkeit – englisch excessive rate of descent
- Warnmeldung: SINK RATE bzw. SINK RATE PULL UP
- Radarhöhe und barometrisch gemessene Sinkgeschwindigkeit werden ausgewertet. Je niedriger die Radarhöhe, desto kleiner ist die Toleranz der maximal erlaubten Sinkgeschwindigkeit.
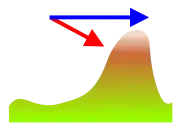
- Mode 2: Gefährliche Bodenannäherungsrate – englisch excessive terrain closure rate
- Warnmeldung: TERRAIN bzw. TERRAINTERRAIN PULL UP
- Warnung vor schnell ansteigendem Gelände. Berücksichtigt wird die vom Radarhöhenmesser abgeleitete Höhe und Höhenänderungsrate. Je niedriger die Höhe, desto kleiner ist die Toleranz der maximal erlaubten Höhenänderungsrate. Befinden sich die Klappen in Landekonfiguration, ist die Warnung unterhalb von 60 m ausgeschaltet.
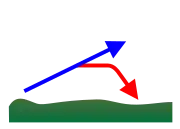
- Mode 3: Höhenverlust nach Start oder Durchstarten – englisch altitude loss after take-off or go-around
- Warnmeldung: DON'T SINK
- Ausgewertet werden die Radarhöhe und der barometrische Höhenverlust nach Aktivierung des TOGA-Modus. Je niedriger die Radarhöhe, desto kleiner ist die Toleranz des maximal erlaubten Höhenverlusts. Im Allgemeinen deaktiviert sich der Modus oberhalb von 1500 ft Radarhöhe.
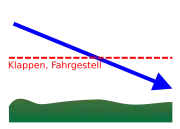
- Mode 4: Unsicherer Bodenabstand und keine Landekonfiguration – englisch unsafe terrain clearance and not in landing configuration
- Warnmeldung: TOO LOW – TERRAIN, TOO LOW – GEAR, TOO LOW – FLAPS
- Das Warnkriterium wird aus Radarhöhe, Fluggeschwindigkeit und der Stellung des Fahrwerks und der Klappen abgeleitet.
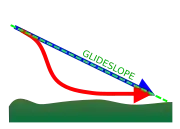
- Mode 5: Abweichung unter Gleitpfad im ILS-Anflug – englisch deviation below glideslope
- Warnmeldung: GLIDESLOPE
- Das Warnkriterium wird aus Radarhöhe und der Abweichung unter den Gleitpfad gebildet. Je niedriger die Radarhöhe, desto kleiner ist die Toleranz der maximal erlaubten Gleitpfadabweichung.
- Mode 6: Hinweise – englisch advisories
- Beim Erreichen bestimmter Radarhöhen ertönen Radarhöhen-Ansagen wie five hundred. Class A-Geräte erlauben zusätzliche konfigurierbare Radarhöhenansagen zwischen 10 und 2000 Fuß.[1]
- Mode 7: Windscherung – englisch windshear
- Warnmeldung: WINDSHEAR
- Tendenzenvergleich zwischen IAS vom Air Data Computer und der GS vom IRS: Schnelle IAS-Änderung gegenüber langsamer GS-Änderung deutet auf eine Windscherung. Eine rapide IAS-Verringerung weist auf eine negative Windscherung (Rückenwindstoß), eine rapide IAS-Erhöhung auf eine positive Windscherung, welche das GPWS – wenn so programmiert – ebenfalls erkennt. Des Weiteren erkennt das GPWS übermäßige vertikale Beschleunigungen im IRS (Fallwind, Microburst).
Informationsfluss GPWS
Das GPWS verarbeitet Signale vom Radar-Altimeter (Höhe über Grund) (nicht vom Funkhöhenmesser), vom ADIRS (Air Data and Inertial Reference System: Druckmessungen und Trägheitsnavigation, daraus die barometrische Höhe, die Vertikalgeschwindigkeit und die Geschwindigkeit), vom Instrumentenlandesystem (ILS, daraus die Ablage vom Gleitpfad), vom Flight Management Computer und Guidance Computer, vom Fahrgestell (ausgefahren oder nicht), von den Landeklappen (Stellung).
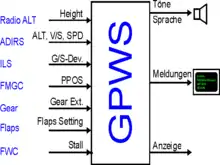
Ein zusätzliches Signal „Stall“ vom Flight Warning Computer stoppt alle GPWS-Ausgaben, weil die Reaktion auf einen Strömungsabriss Vorrang hat. Zusätzlich können einzelne Modes durch eine „Inhibit“-Schaltung unterdrückt werden.
Mensch-Maschine-Schnittstelle
Alarme des GPWS werden als auditive Anzeige (Töne und Sprache) ausgegeben, zusätzlich als visuelle Anzeige (Textmeldung und Anzeigelampe) im Blickfeld jedes Piloten. Es werden keine exakten Messwerte (die Höhe oder die Sinkgeschwindigkeit) angegeben, die Alarme wecken Aufmerksamkeit und erhöhen das Situationsbewusstsein. Die Bedienung erfolgt mit Tasten im Overhead-Panel.