GNSS-Navigation
GNSS-Empfänger geben Standortdaten aus, die für sich alleine genommen keine Navigation ermöglichen. Erst die Verrechnung mehrerer nacheinander aufgenommener Positionsdaten erlaubt eine Navigation zu einem Zielort.
Anwendungen
Satellitendarstellung (GPS)
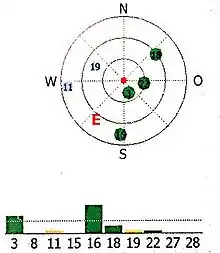
Das Bild rechts zeigt eine typische Darstellung der empfangenen GPS-Satelliten auf einem GPS-Empfänger. Die konzentrischen Kreise bilden das sichtbare Firmament als Zentralprojektion ab. Der rote Mittelpunkt ist der Zenit des eigenen Standorts, der äußere Kreis der Horizont, die Zwischenkreise jeweils 30° bzw. 60° Elevation. Die Momentaufnahme zeigt sechs Satelliten, der Empfangsort liegt im Süden Deutschlands. Die vier grün markierten Satelliten übertragen Positionsdaten. Die Signalstärke der beiden blauen Satelliten mit den Nummern PRN-19 und PRN-11 ist zur Zeit der Messung für eine Auswertung zu schwach. Bei ca. 30°W und einer Höhe von ca. 40°, markiert durch den Buchstaben „E“, steht der westliche EGNOS-Transponder auf einem geostationären Satelliten. Moderne GPS-Empfänger werten seine Korrektursignale aus. Geräte der Marke Garmin blenden den Buchstaben „D“ in die Signalintensitätsbalken ein, wenn EGNOS-Daten berücksichtigt werden. Unter günstigen Umständen wächst die Ortsauflösung auf wenige Meter.
Geräte des Herstellers Garmin geben für DGPS-Satelliten nicht den korrekten dreistelligen PRN-Code aus, sondern einen um 87 verringerten Wert. EGNOS-Satelliten mit den PRN-Codes 120 und 131 erhalten die Kennung 33 bzw. 44, WAAS-Satelliten 35 und 47.
Kursanzeige
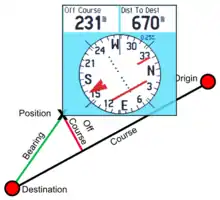
Der Kurs ist die Verbindungslinie zwischen Ausgangspunkt (Origin) und Ziel (Destination). Üblicherweise wird der Ausgangspunkt in dem Moment festgelegt, wo das Ziel eingegeben wird. Der Kursanzeiger eines Geräts (Course pointer) hält die Kursrichtung fest. Die Aufspaltung des Zeigers ist ein Maß für die Kursabweichung (Off Course). Im Bild beträgt die Abweichung 231 m. Den Maßstab legt die kleine Ziffer rechts oben neben der Skala fest, hier 0,25 km bei maximaler Aufspaltung. Bei manchen Geräten wechselt die Farbe beim Überschreiten des Maximalwerts.
Drift
Bei erdgebundener Fortbewegung nähert man sich dem Ziel am schnellsten, indem man auf es zugeht. Bei Schiffen oder Flugzeugen, die einer Querdrift ausgesetzt sind, verlängert sich der Weg zu einer Kurve, der Homing-Kurve.
Geräte zeichnen den zurückgelegten Weg (Track) nahezu in Echtzeit auf und können deshalb die Abweichung zwischen Peilung und Track bestimmen. Erst wenn die Winkelabweichung, der Turn, auf null reduziert wird, bewegt man sich geradlinig zum Zielpunkt. Die Fahrzeuglängsachse (Heading) ist um den Vorhaltewinkel aus der Fortbewegungsrichtung gedreht. Die Peilungsanzeige des Geräts zeigt dann nicht entlang der Fahrzeugachse, sondern um den Vorhaltewinkel versetzt.
Genauigkeit

Für Navigationsberechnungen mit einer Genauigkeit von 1 % genügt es, die Erde als Kugel mit einem Radius von R = 6.371 km anzusetzen. Für kleine Entfernungen unterhalb 500 km ist der Unterschied zwischen Orthodrome und Loxodrome vernachlässigbar.
Über den Umfang der Erde erhält man unmittelbar aus der Längendifferenz ΔL (in Grad) zweier Punkte (Bei bekannter Breite B (in Grad)) die Entfernung ΔsL:
- ΔsL= 2 * π* R * ΔL / 360° * cos(B)
Bei einer Breitengraddifferenz ΔB bei der Breite B (in Grad) beträgt die Entfernung zweier Punkte: ΔsB
- ΔsB= 2 * π* R * ΔB / 360°
Die Genauigkeit heutiger GPS-Empfänger liegt bei ca. 5 m. Konventionelle GPS-Geräte beschränken deshalb die Eingabe auf eine Tausendstel Minute: gg° mm,mmm' oder zehntel Sekunde: gg° mm' ss,s". Denn es gilt:
- 0,00001 Grad entsprechen 1,1 m
- 0,001 Minuten entsprechen 1,8 m
- 0,1 Sekunden entsprechen 3 m
Entlang des 60°-Breitenkreises reduzieren sich diese Entfernungswerte auf etwa die Hälfte.
Datenformat
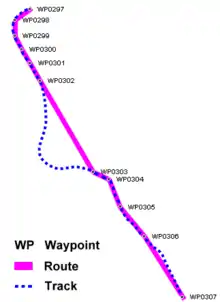
Die Schnittstelle von Empfangseinheiten ist genormt. Die Daten werden im sogenannten NMEA-Format bereitgestellt. Manche Funkmäuse liefern diesen Datenstrom unmittelbar aus. Wenn der Empfänger die Daten weiter verarbeitet, erstellt er aus den Rohdaten einen sogenannten Track. Es ist eine Abfolge von Wegpunkten, die in kurzen Abständen aufgezeichnet werden. Man spricht von einer Route, wenn der Track auf wenige wesentliche Wegpunkte reduziert wurde. Ein Wegpunkt selbst ist die Koordinatendarstellung eines Raumpunktes. Er beschreibt mindestens die Ortskoordinaten Länge und Breite, meist auch Zeitpunkt der Aufnahme und Höhe. Besondere Wegpunkte erhalten weitere Attribute, beispielsweise eine Beschreibung oder einen Kommentar. Fast alle proprietären Standards lassen sich in das offene XML-basierte Format GPS Exchange Format (GPX) umrechnen. Auch die neueren Versionen von Google Earth können GPX darstellen.
GPS Signal
Kommerzielle Geräte werten bei GPS das L1-Signal aus, das Nutzdaten mit einer Datenrate von 50 Baud überträgt. Ein Datenblock, Frame, umfasst 1500 Bit, entsprechend einer Übertragungszeit von 30 s. Jedes Frame setzt sich aus 5 Subframes zusammen. Die Subframes 1 bis 3 übertragen die Ephemeriden und Korrekturwerte des sendenden Satelliten. Die Subframes 4 und 5 senden Datensätze der stark gerundeten Ephemeriden und Zustandsinformationen anderer GPS-Satelliten. 25 Frames (12,5 Min) sind für die Übertragung eines kompletten Almanachs aller Satelliten, nach Spezifikation des GPS-Systems maximal 32, erforderlich. Die Almanach-Daten liefern Anhaltspunkte für die Kennung, den Zustand, die Position und die Dopplerverschiebung, um die Ortung nach Einschalten des Empfängers (time to (first) fix (TTF)) zu beschleunigen.
Die Bewegung der Satelliten verursacht eine Dopplerverschiebung von ±5 kHz, die des Empfängers von bis zu 1,46 Hz pro 1 km/h Geschwindigkeit. Das 2 MHz breite Signal eines Satelliten liegt damit mit einer Genauigkeit von ±10 kHz auf der Nennfrequenz. Der erste Schritt der Signalauswertung ist die Korrelation des Satellitensignals mit den PRN-Codes der einzelnen Satelliten. Alte Empfänger konnten das Signal nur sequenziell absuchen, moderne suchen gleichzeitig mit 200 000 und mehr Korrelatoren. Verlängerte Integrationszeiten steigern die Empfindlichkeit für die Signaldetektion.
Die Signalstärke der GPS-Satelliten unter freiem Himmel liegt zwischen −158 dBW und −160 dBW. Auch in Gebäuden und Fahrzeugen lässt sich GPS empfangen, sofern die Abschwächung 30 dB (Betonwand) bis 40 dB nicht übersteigt. In einer Tiefgarage ist ein Empfang nahezu ausgeschlossen. Sind die Satelliten einmal erfasst, ist das Tracken auch bei einer höheren Dämpfung möglich. Metallbedampfte Scheiben in ICE-Zügen schwächen das GPS-Signal um bis zu 30 dB, sodass GPS-Signale nur in der Nähe der Ausstiegstüren empfangen werden.
Militärische Systeme, und später auch Galileo und modernes GPS, senden auf zwei bis drei Frequenzen. Dadurch verbessern sich die Ionosphärenkorrektur für die Signallaufzeit und die Datenrate und damit die Positionsgenauigkeit. Die Integrität der Positionsdaten wird sich auch weiterhin nur über Zusatzdienste mit ausreichender Sicherheit beurteilen lassen.
Bestimmungsgrößen
Bei Empfang der Signale eines Satelliten:
- Uhrzeit mit einer Genauigkeit < 1 µs.
Bei Empfang der Signale von drei Satelliten:
- Position mit einer Genauigkeit < 20 m
Bei Empfang der Signale von vier Satelliten:
- Höhe, meist bezogen auf den WGS84-Ellipsoid, mit einer Genauigkeit < 30 m
- Bestimmung der Geschwindigkeit des Empfängers über Dopplerverschiebung (einfache GPS-Empfänger leiten sie aus der Änderung der Position ab) mit einer Genauigkeit < 0,05 m/s
- Genauigkeit aus Satellitengeometrie (DOP)
Bei Empfang der Signale von mehr als vier Satelliten:
- Verbesserung der Positionsgenauigkeit < 10 m (Höhe < 20 m).
Bei Empfang des Signals eines DGPS-Satelliten wie EGNOS:
- Verbesserung der Positionsgenauigkeit < 5 m
Abgeleitete Größen
- Geschwindigkeit (aus Positions- und Zeitdifferenz)
- Sinkgeschwindigkeit (aus Höhen- und Zeitdifferenz)
- Gleitzahl (Verhältnis aus Horizontal- und Sinkgeschwindigkeit)
- Absolute Höhe (Umrechnung z. B. anhand von Geoidundulationstabellen)
- Positionen von Gestirnen, beispielsweise Uhrzeit des Sonnenauf- und -untergangs
Bei Eingabe eines Zielpunktes
- Kurswinkel
- gutgemachte Geschwindigkeit
- Zeit bis zum Ziel und geschätzte Ankunftszeit
Beschränkungen
Zivile Empfänger für GPS unterliegen den COCOM Limits. Eingeführt von der CoCom existieren sie im Wassenaar-Abkommen bis heute fort. Die Beschränkungen bestehen ab einer
- Geschwindigkeit höher als 1000 Knoten (1900 km/h),
- Höhe über 60.000 Fuß (18.000 Meter).
Die Empfänger von manchen Herstellern schalten sich bereits ab, wenn eine der Beschränkungen überschritten wird. Andere Hersteller legen diese Limitierung großzügiger aus und der Empfänger schaltet sich erst ab, wenn beide Beschränkungen überschritten werden. Mit dieser Beschränkung soll verhindert werden, dass zivile GPS-Empfänger zur Steuerung von Raketen oder ähnlichen Waffensystemen eingesetzt werden können.[1]
Siehe auch
Einzelnachweise
- John Graham-Cumming: GAGA-1: CoCom limit for GPS, 28. November 2010 (englisch)