Ferraris-Sensor
Der Ferraris-Sensor (auch Ferraris-Beschleunigungssensor oder Relativbeschleunigungssensor) ist ein Beschleunigungssensor, der berührungslos die relative Beschleunigung zweier Bauteile nach dem von Galileo Ferraris entdeckten Wirbelstromprinzip zueinander misst. Er wurde von Lothar Wilhelmy[1] als Dreh-Beschleunigungs-Sensor für die Antriebstechnik entwickelt und zusammen mit Bernhard Hiller an unterschiedliche Messaufgaben angepasst.[2][3][4] Der Ferraris-Sensor hat kein Feder-Masse-System wie andere Beschleunigungssensoren und ist deshalb unabhängig von der Zentrifugal- und Erdbeschleunigung.
Eingesetzt wird der Ferraris-Sensor auf Prüfständen zur Systemanalyse, Untersuchung von Torsionsschwingungen und dient der Verbesserung der Regelung von hochdynamischen Servoantrieben in Druckmaschinen, Linearantrieben und Robotern.
Funktionsweise
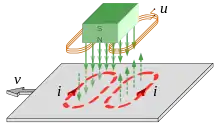
Das bewegte Bauteil enthält einen nicht magnetischen, elektrisch leitfähigen Körper, dessen Geschwindigkeitsänderung gemessen werden soll. Bei der Drehbeschleunigungsmessung ist das eine Scheibe, im Falle einer Linearbeschleunigungsmessung ein Blechstreifen aus Aluminium oder Kupfer.
Ein Dauermagnet erzeugt ein zeitlich konstantes, räumlich begrenztes Magnetfeld senkrecht zur Bewegungsrichtung. Dadurch werden Wirbelströme i im bewegten Körper erzeugt. Diese Wirbelströme rufen sekundäre Magnetfelder hervor (im Bild gestrichelt), deren Stärke mit der Geschwindigkeit wächst. Diese Änderung induziert eine Spannung in der Aufnehmerspule. Da diese Spule nur die Änderungen im Magnetfeld detektiert, ist die induzierte Spannung u proportional zur Beschleunigung .


Vorteile
Der Sensor misst die relative Beschleunigung. Das macht ihn für den Einsatz in mehrachsigen Robotern und Werkzeugmaschinen interessant, wo sonst die Erdbeschleunigung in Berechnungen mit berücksichtigt werden muss.
Er hat eine hohe Linearität und ein hohes Signal-Rausch-Verhältnis.
In digitalen Servoantrieben kann die direkte Messung der Beschleunigung als Rückkoppelsignal (z. B. zur Systemdämpfung) oder zum Aufbau einer unterlagerten Beschleunigungsregelung verwendet werden, die eine deutliche Erhöhung der Störsteifigkeit und Dynamik ermöglicht.[5] Darüber hinaus ist durch Integration eine gering quantisierte Geschwindigkeit berechenbar.
Nachteile
Nachteilig ist Verlustleistung, die wie bei Wirbelstrombremsen die Scheibe oder das Blech erwärmt. Bei steigender Geschwindigkeit verliert der Sensor außerdem seine Empfindlichkeit.
Einzelnachweise
- DE 198 28 372 C2, Patenterteilung 31. August 2000
- DE 101 18 954 C1, Patenterteilung 14. November 2002
- EP 1 377 838 B1, Patenterteilung 1. Februar 2006
- EP 1 597 594 B1, Patenterteilung 13. September 2006
- Dipl.-Ing. Bernhard Hiller „Neue Entwicklungen und Anwendungen des Ferraris-Sensors“ im Seminar: Fortschritte in Regelungs- und Antriebstechnik, Stuttgart, ISW, 2005 pdf 3,5 MByte