Verdrillantrieb
Der Verdrillantrieb (engl. Twisted string actuator) ist ein linear wirkender Aktor, der eine verhältnismäßig hohe Zugkraft erzeugen kann.
Aufbau und Prinzip
Der Aufbau des Verdrillantriebes ist in Abb. 1[1] schematisch dargestellt. Die Schnur ist an dem oberen Ende axial gelagert und mit einem Rotationsmotor verbunden. Das andere Ende der Schnur ist linear gelagert und an einer Last befestigt. Durch das Eigengewicht der Last entsteht eine Kraft, die nach unten wirkt.
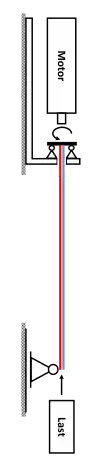
Die verwendete Schnur besteht aus mehreren einzelnen Schnurfasern. Führt der Motor eine Drehbewegung aus, so wird entgegen der Last eine Kraft aufgebracht. Diese bewegt die Last in Richtung Motor. Die Bewegung wird durch das Linearlager geführt. Dieser Aufbau nutzt das Prinzip des Schnurgetriebes, welches eine Drehbewegung des Motors in eine Linearbewegung der Last wandelt. Zum besseren Verständnis des Schnurgetriebes wird das Prinzip im Folgenden stark vereinfacht im Arbeitsbereich ( ) der Schnur betrachtet. Dabei wird eine Schnur mit Fasern verwendet. Einflüsse wie beispielsweise Reibung, Anlauf und Losbrechbedingungen, Hyperverdrillung und nichtrunde Querschnitte der Schnur werden vereinfacht vernachlässigt. Das im Folgenden beschrieben Modell ist in The Twisted String Actuation System: Modeling and Control[1] entwickelt worden.


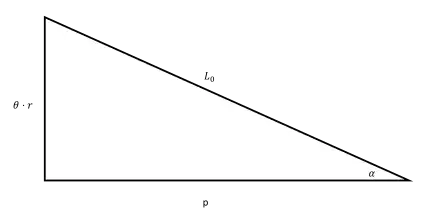
Bei dem Verdrillen der Schnur werden die einzelnen Schnurfasern an einem Ende einer Rotationsbewegung ausgesetzt. Gleichzeitig wird durch das Linearlager an dem anderen Ende der Schnur (der Last-Seite) eine rotatorische Bewegung verhindert. Dadurch verdrehen sich die Schnurfasern mit jeder Rotation θ auf der Motorseite immer stärker in sich selbst. Es entsteht eine Helix und die Wirklänge der Schnur verkürzt sich. Die Abwicklung der Helix bildet ein Dreieck (siehe Abb. 2) anhand dessen die Bewegungszusammenhänge besser dargestellt werden können. Die Länge der Hypotenuse in diesem Dreieck ist die Länge der Schnurfasern. Diese Länge ist unter Vernachlässigung von Kräften und Materialdehnungen konstant. An der Spitze des Dreiecks beträgt der Drehwinkel θ der Schnur aufgrund der linearen Lagerung null. Auf der gegenüberliegenden Seite des Dreieckes entspricht der Drehwinkel der Schnur dem Drehwinkel des Antriebes. Durch weiteres Verdrillen der Schnur erhöht sich die Länge der Seite . Dadurch verkürzt sich (unter der Annahme einer konstanten Faserlänge und eines konstanten Schnurdurchmessers) die Wirklänge der Schnur , während sich der Winkel α an der Spitze des Dreiecks erhöht[1].



Mathematisch beschrieben bedeutet dies:
(1)
- ,

(2)
- .

Im nächsten Schritt betrachten wir zusätzlich die wirkenden Kräfte unter weiterer Vernachlässigung der Reibungs- und Dehnungseffekte.
An der Motor-Seite der Schnur wirkt das Drehmoment , welches über den Verdrillwinkel α auf die Last als axiale Kraft wirkt. Bei einem weggesteuerten Verdrillen besteht im bewegten Zustand ein Gleichgewicht zwischen resultierender axialer Kraft in der Schnur und Last-Kraft. Bei Berücksichtigung der Anzahl der Schnurfasern verteilt sich die in einer Schnurfaser wirkende Kraft über diese Anzahl.



Dadurch ergeben sich folgende Zusammenhänge:
(3)
- ,

und damit:
(4)
- .

Es zeigt sich, dass der Verdrillwinkel α einen Zusammenhang zwischen dem Kräfteverhältnis und dem Längenverhältnis des Schnurgetriebes herstellt. Daher ist der Übersetzungsgrad des Schnurgetriebes eine direkte Funktion des Verdrillwinkels. Es ergibt sich ein nichtlineares Verhalten des Getriebes.
Als Nächstes werden die Dehnungseffekte in der Schnur berücksichtigt. Bei der Verwendung von Schnüren mit geringen Durchmessern kann mit einem sehr kleinen Drehmoment bereits eine sehr hohe lineare Kraft erzeugt werden. Allerdings besitzen dünner Schnüre eine geringere Dehnsteifigkeit , sodass diese sich stärker verformen. Unter Belastung ändert sich die Ausganglänge der Schnurfasern im Ausgangszustand (unverdrillt) in Abhängigkeit von der angreifenden Last an jeder Faser . Dies lässt sich wie folgt beschreiben:

(5)
- .

Zusätzlich ändert sich beim Verdrillen die Kraft in Richtung der Fasern, sodass beim Verdrillen selbst die Gesamtlänge der Fasern sich ändert. Dies hat wiederum einen Einfluss auf die Wirklänge der Schnur.
Der Zusammenhang ist im Folgenden dargestellt:
(6)
- .

Da die Kraft wiederum von abhängt, ist die Lösung dieser Gleichung analytisch nicht einfach erreichbar ist. Als Vereinfachung ist in den bisherigen wissenschaftlichen Untersuchungen immer eine unendlich hohe Steifigkeit angenommen worden. Diese Annahme trifft in der Realität nicht zu, so dass in allen Untersuchungen immer eine Abweichung der theoretisch berechneten Kurven zu den experimentell ermittelten Kurven erkennbar ist (siehe The Twisted String Actuation System: Modeling and Control[1]).

Verwendung
In der Tabelle 1 sind die Eigenschaften des Verdrillantriebes angegeben. Die Parameter für die Berechnung der Werte des TSA sind aus Investigation of twisted string actuation with a programmable mechanical load test stand.[2] Der Wert für die Effizienz des Systems ist aus Twisted string actuation systems: A study of the mathematical model and a comparison of twisted strings.[3] Bei beiden Versuchen wurden Schnüre aus UHMWPE eingesetzt.
Als Vergleich sind die Eigenschaften für einen menschlichen Muskel nach The selection of mechanical actuators based on performance indices[4] angegeben.
| Eigenschaft | Einheit | Verdrillantrieb | Menschlicher Muskel nach |
| maximale Dehnung | % | 28,6 | 30 bis 70 |
| maximale Spannung | MPa | 285 | 0,1 bis 0,4 |
| maximale Frequenz | Hz | 0,5 | 5 bis 5000 |
| Effizienz | % | 90 | 20 bis 25 |
| Leistungsdichte | W/kg | 40732724 | 500 |
Hierbei ist zu erwähnen, dass diese Ergebnisse sich auf einen speziellen Versuch beziehen. Bei der Verwendung von Schnüren mit anderen Radien oder Bruchdehnungen sind abweichende Ergebnisse zu erwarten. Auch die Thematik des Verschleißes spielt für die Eigenschaften des Antriebes eine große Rolle, da dadurch die Belastbarkeit der Schnur variiert.
Zusammenfassend kann gesagt werden, dass der Verdrillantrieb ein vergleichsmäßiger langsamer Antrieb ist, der mit einer maximalen Dehnung von 28 % in seinem Anwendungsgebiet stark limitiert ist. Durch sein nichtlineares Verhalten ist eine Regelung des Antriebes sehr schwierig. Zusätzlich kann der Antrieb nur Zugkräfte aufbringen, sodass komplementäre Bewegungen mit einem Antrieb alleine nicht umgesetzt werden können. Allerdings kann er hohe Spannungen erzeugen und bringt eine hohe Leistungsdichte mit. Ein weiterer Vorteil des Antriebes ist seine hohe Flexibilität, sodass er für Anwendungen eingesetzt werden kann, die mit den konventionellen Antrieben nur schwer umgesetzt werden können. Der Antrieb hat einen einfachen Aufbau und kann somit einfac hergestellt werden. Der Vergleich des TSA mit einem menschlichen Muskel wurde gewählt, da viele denkbare Anwendungsfälle im Bereich der menschlichen Bewegung liegen.
Einen der größten bisherigen Erfolge konnte der Verdrillantrieb in der Anwendung als Aktor für eine sogenannte Roboterhand erringen. Im Rahmen des DEXMART Projektes wurde eine Roboterhand entwickelt, welche feinfühlige taktile Aufgaben erledigen konnte. Als Grundgestell wurde das Basiskonzept der Shadow-Hand übernommen; die Antriebe wurde durch den Verdrillantrieb ersetzt.[6] Der Verdrillantrieb ist Forschungsobjekt mehrerer Universitäten, da die Regelung aufwändig und die mechanischen Eigenschaften des Antriebes schwierig beherrschbar sind. Außerdem sind die meisten Anwendungsgebiete nicht vollständig erforscht, wie beispielsweise die menschliche Bewegung mit Aktoren nachhaltig unterstützt werden kann. Im Folgenden sind einige Forschungen zu dem Verdrillantrieb aufgelistet.
- University of Utah: Torsion of Rope-Connected Hoops Leads to Light Weight Prosthetic Actuator, Sept. 1973.[7]
- Kremer, S.: Twisted Cord Actuator. U.S. Patent US4,843,921A, 4. Juli 1989.[8]
- McGill University: Centre for intelligent machines: Department of mechanical engineering: Experimental Validation of Compliance models for LADD transmission kinematics, 1995.[9]
- Soham, M.: Twisting Wire Actuator. U.S. Patent US7477965B2, 13. Jan 2019.[10]
- Tokai University: Complex and Flexible Robot Motions by Strand-Muscle Actuators, 2007.[11]
- Uni of Kitakyushu Information and Media Engineering: A Five Fingered Robotic Hand Prototype by using Twist Drive, 2010.[12]
- Universität des Saarlandes: Laboratory of Actuation Technology
- Secondi Università di Napoli: Dipartimento Di Ingegneria
- Università di Bologna: Department of Electronics, Computer Science ans Systems
- Korea University of Technology and Education: Biorobotics Laboratory
- KAIST Korea: Mechatronics, Systems and Control: Development of anthropomorphic robot hand with dual-mode twisting actuation and electromagnetic joint locking mechanism, 2013.[13]
- Cleveland State/ West Virginia University: Design and Fabrication of an Assistive Device for Arm Rehabilitation Using Twisted String System, 2013.[14]
- Technische Universität Darmstadt: Institute of Electromechanical Design
- Oak Ridge Associated Uni. & SGT Inc. Intelligent Robotics Group: Impedance controlled twisted string actuators for tensegrity robots, 2014.[15]
- Uni. Okayama: Computer Science & Uni Ritsumeikan Robotics: Robotic joint design by agonist and antagonist arrangement with twisting smalldiameter round-belts, 2015.[16]
- University Coimbra: Institute of Systems and Robotics: The uc softhand: Light weight adaptive bionic hand with a compact twisted string actuation system, 2016.[17]
Siehe auch
Literatur
SUZUKI, Masakazu. Complex and flexible robot motions by strand-muscle actuators. In: Climbing and walking robots: Towards new applications. InTech, 2007.[18]
Einzelnachweise
- WÜRTZ, Thomas, et al. The twisted string actuation system: Modeling and control. In: 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. IEEE, 2010. S. 1215–1220.
- MAY, Chris, et al. Investigation of twisted string actuation with a programmable mechanical load test stand. In: Innovative Small Drives and Micro-Motor Systems; 9. GMM/ETG Symposium. VDE, 2013. S. 1–6.
- GAPONOV, Igor; POPOV, Dmitry; RYU, Jee-Hwan. Twisted string actuation systems: A study of the mathematical model and a comparison of twisted strings. IEEE/ASME Transactions on Mechatronics, 2014, 19. Jg., Nr. 4, S. 1331–1342.
- HUBER, J. E.; FLECK, N. A.; ASHBY, M. F. The selection of mechanical actuators based on performance indices. Proceedings of the Royal Society of London. Series A: Mathematical, physical and engineering sciences, 1997, 453. Jg., Nr. 1965, S. 2185–2205.
- Ehm, Benjamin: Seminararbeit: Die Anwendung des Verdrillantriebes in Orthesen. Universität des Saarlandes Mai 2016.
- SICILIANO, Bruno (Hg.). Advanced bimanual manipulation: Results from the dexmart project. Springer Science & Business Media, 2012.
- JACOBSEN, S. C.; JERRARD, R. B. Torsion of Rope-Connected Hoops Leads to Light Weight Prosthetic Actuator. In: 26th ACEMB. 1973.
- Kremer, Stephen R.,1989, Twisted cord actuator, Anmeldung 18. April 1988 US, Patentschrift US4834921A. 4. Juli 1989
- MENNITTO, G.; BUEHLER, Martin. Experimental validation of compliance models for LADD transmission kinematics. In: Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human Robot Interaction and Cooperative Robots. IEEE, 1995. S. 385–390.
- Soham, Moshe, 2009, Twisting wire actuator, Anmeldung: 24. Oktober 2004 US, Patentschrift US7477965B2, 13. Januar 2009
- SUZUKI, Masakazu. Complex and flexible robot motions by strand-muscle actuators. In: Climbing and walking robots: Towards new applications. InTech, 2007.
- GODLER, Ivan; SONODA, Takashi. A five fingered robotic hand prototype by using twist drive. In: ISR 2010 (41st International Symposium on Robotics) and ROBOTIK 2010 (6th German Conference on Robotics). VDE, 2010. S. 1–6.
- SHIN, Young June, et al. Development of anthropomorphic robot hand with dual-mode twisting actuation and electromagnetic joint locking mechanism. In: 2013 IEEE International Conference on Robotics and Automation. IEEE, 2013. S. 2759–2764.
- SHISHEIE, Reza, et al. Design and fabrication of an assistive device for arm rehabilitation using twisted string system. In: 2013 IEEE International Conference on Automation Science and Engineering (CASE). IEEE, 2013. S. 255–260.
- PARK, In-Won; SUNSPIRAL, Vytas. Impedance controlled twisted string actuators for tensegrity robots. In: 2014 14th International Conference on Control, Automation and Systems (ICCAS 2014). IEEE, 2014. S. 1331–1338.
- INOUE, Takahiro, et al. Robotic joint design by agonist and antagonist arrangement with twisting small-diameter round-belts. In: 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2015. S. 1751–1756.
- TAVAKOLI, Mahmoud; BATISTA, Rafael; SGRIGNA, Lucio. The UC softhand: light weight adaptive bionic hand with a compact twisted string actuation system. In: Actuators. Multidisciplinary Digital Publishing Institute, 2016. S. 1.
- SUZUKI, Masakazu. Complex and flexible robot motions by strand-muscle actuators. In: Climbing and walking robots: Towards new applications. InTech, 2007.