Universal Asynchronous Receiver Transmitter
Universal Asynchronous Receiver Transmitter, kurz UART (Aussprache: ʊəˡat oder ˡju art), ist eine elektronische Schaltung, die zur Realisierung digitaler serieller Schnittstellen dient. Dabei kann es sich sowohl um ein eigenständiges elektronisches Bauelement (ein UART-Chip bzw. -Baustein) oder um einen Funktionsblock eines höherintegrierten Bauteils (z. B. eines Mikrocontrollers) handeln.

Eine UART-Schnittstelle dient zum Senden und Empfangen von Daten über eine Datenleitung und bildet den Standard der seriellen Schnittstellen an PCs und Mikrocontrollern. Auch im industriellen Bereich ist die Schnittstelle mit verschiedenen Interfaces (z. B. RS-232 oder EIA-485) sehr verbreitet.
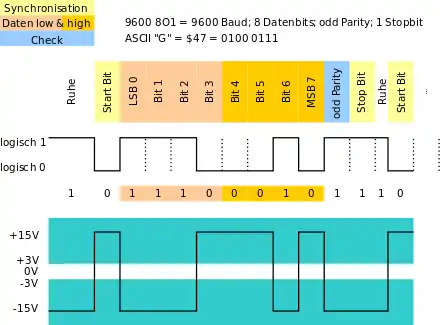
Die Daten werden als serieller digitaler Datenstrom mit einem fixen Rahmen übertragen, der aus einem Start-Bit, fünf bis maximal acht oder neun Datenbits (abhängig von der Anwendung), einem optionalen Parity-Bit zur Erkennung von Übertragungsfehlern und einem oder zwei Stopp-Bits besteht. Der Sender braucht dem Empfänger den Sendetakt nicht über eine eigene Steuerleitung mitzuteilen. Stattdessen berechnet der Empfänger den Takt des Senders aus dem Takt der Datenleitung und synchronisiert sich mit Hilfe der Start- und Stopbits darauf. Gewöhnlich kann das Stopp-Bit auf das 1,5- oder 2-Fache der normalen Übertragungszeit eines Bits konfiguriert werden. Das wird als 1,5 bzw. 2 Stopp-Bits bezeichnet und muss sowohl beim Sender als auch beim Empfänger gleichmäßig eingestellt werden. Weil der Empfänger den Takt des Senders mit jedem empfangenen Byte neu berechnet und sich jedes Mal neu darauf synchronisiert, können auch große Unterschiede des Taktes zwischen Sender und Empfänger ausgeglichen werden. Auch kurzfristige Taktschwankungen werden so schnell wieder ausgeglichen. Deswegen nennt man diese Art der Datenübertragung „asynchron“ und diese Art der Synchronisation „bytesynchron“.
Asynchrone Datenübertragungsverfahren und Realisierung als integrierter Schaltkreis
| Bitrate | Bitdauer |
|---|---|
| 50 bit/s | 20,0 ms |
| 110 bit/s | 9,09 ms |
| 150 bit/s | 6,67 ms |
| 300 bit/s | 3,33 ms |
| 1.200 bit/s | 833 µs |
| 2.400 bit/s | 417 µs |
| 4.800 bit/s | 208 µs |
| 9.600 bit/s | 104 µs |
| 19.200 bit/s | 52,1 µs |
| 38.400 bit/s | 26,0 µs |
| 57.600 bit/s | 17,4 µs |
| 115.200 bit/s | 8,68 µs |
| 230.400 bit/s | 4,34 µs |
| 460.800 bit/s | 2,17 µs |
| 921.600 bit/s | 1,08 µs |
| 2.000.000 bit/s | 500 ns |
| 3.000.000 bit/s | 333 ns |
Asynchronbetrieb (Start-Stop-Betrieb)
Die Besonderheit bei der asynchronen Betriebsweise besteht darin, dass der Sender dem Empfänger kein eigenes Taktsignal auf einer eigenen Steuerleitung überträgt. Stattdessen synchronisiert sich der Empfänger über die Länge des Rahmens, vermittelt durch die Vorderflanke des neuen Start-Bits nach dem letzten empfangenen Stopp-Bit, sowie die eingestellte Baudrate (welche in diesem Fall der Bitrate entspricht). Weil der Beginn einer Übertragung mit dem Start-Bit zu beliebigen Zeitpunkten erfolgen kann, wird diese serielle Schnittstelle als asynchron bezeichnet. Um eine Synchronisation gewährleisten zu können, ist die Anzahl der übertragbaren Datenbits innerhalb eines Rahmens eingeschränkt. Würde mehr als ein Byte in einen Rahmen verpackt, könnte die Synchronisation verloren gehen, was zu Fehlinterpretationen des Datenstromes und somit zu einer fehlerhaften Übertragung führen könnte. Wenn in einer Sendepause keine Daten zu übertragen sind, so legt der Sender die Leitung auf die Polarität des Stopp-Bits. Weil der Empfänger sich mit jedem übertragenen Rahmen neu synchronisiert, ist es nicht notwendig, dass zwischen den übertragenen Rahmen ein zeitlicher Zusammenhang besteht. Nur für die Dauer eines einzelnen Rahmens müssen Sender und Empfänger synchron arbeiten, nicht länger. Das nennt man „bytesynchron“ oder zeichensynchron.
Serielle Schnittstellen in synchroner Betriebsweise benötigen keinen Rahmen aus Start-/Stopp-Bits. Sie stellen die Synchronität der Teilnehmer auf andere Weise sicher, zum Beispiel indem eine zusätzliche Taktleitung verwendet wird oder der Takt aus dem Leitungscode zurückgewonnen wird.
Serielle Schnittstelle
Die Geschichte des UART ist eng verbunden mit der Standardisierung der Datenkommunikation von RS-232. Waren die ersten UARTs für Datenübertragungsraten weniger hundert Bit/s und den Anschluss an Teletypes mit Stromschnittstelle oder Modems vorgesehen, so erreichten sie in späteren Jahren als eigenständige Chips mehrere Megabit pro Sekunde. Die asynchrone Übertragung findet in der Datenkommunikation bei der RS-232-Schnittstelle Verwendung. Diese Schnittstelle weist eine vergleichsweise große Verbreitung auf. Ein UART erzeugt die auf der RS-232-Schnittstelle zu übertragenden Datenbits und den dazu notwendigen Datenrahmen. Die eigentliche RS-232-Schnittstelle besteht zusätzlich noch aus Pegelumsetzern und weiteren Bauelementen wie Steckern, welche nicht mehr Teil eines UART sind.
Damit UART-Baugruppen kommunizieren können, müssen die Empfangsleitung (Rx) der einen und die Sendungsleitung (Tx) der anderen Baugruppe am Stecker gegenüberstehen. Damit sind stets zwei Steckerbelegungstypen (Master und Slave) erforderlich, auch wenn die Geräte vollkommen gleichberechtigt kommunizieren. Sollen Master mit Master oder Slave mit Slave kommunizieren können, sind Kreuzverbinder (analog dem Null-Modem-Kabel der seriellen Schnittstelle oder dem Cross-Over-Kabel des Ethernet) erforderlich.
Eine Modifikation, die Single-Wire UART (SWART), vermeidet dieses Verpolungsproblem. Werden Rx und Tx zusammen auf einem Pin vereint, ist zwar nur eine Simplex-Übertragung möglich, dafür aber können dann beliebige Module miteinander kommunizieren. Es können sogar mehrere UART-Module auf einem Draht kommunizieren (SWART-Bus). Die SWART ist insbesondere für kurze Entfernungen und für Datenraten bis 115.200 Baud geeignet.
Realisierungen
Realisiert wird ein UART meist als Kommunikationsbaustein in Mikrocontrollern, oder in Computern als eigenständige integrierte Schaltung, als Teilfunktion in Chipsätzen, in Form von Hardwarebeschreibungssprachen für die Integration in Field Programmable Gate Arrays (FPGAs) oder als sogenanntes „Software-UART“, das nur durch eine Programmabfolge vorliegt und bestimmte Ein-/Ausgabepins direkt ansteuert (Bit-Banging). Die zu übertragenden bzw. die empfangenen Daten werden an das UART meist in paralleler Form, beispielsweise über einen CPU-externen Bus, geliefert.
Ein UART-Baustein, der über viele Jahre in handelsüblichen PCs als eigenständiger Baustein verwendet wurde, ist das von National Semiconductor entwickelte UART 8250 und seine kompatiblen Nachfolger 16450 und 16550. Der 16550 enthält neben dem Empfangs- bzw. Sendeteil zusätzlich einen FIFO-Pufferspeicher mit 16 Byte, welcher einen Überlauf des Empfangspuffers von sonst nur einem Byte bei hohen Bitraten minimiert. Der Prozessor wird zudem nur noch um ein Sechszehntel mal so häufig von Interrupts unterbrochen, was die Effizienz des Programmablaufes deutlich erhöht. 16450 und 16550 ICs sind zueinander pin-kompatibel und können problemlos gegeneinander ausgetauscht werden. Häufig war das eine notwendige sowie recht einfache Maßnahme um schnell getakteten Prozessoren, etwa ab i386, schnelle serielle Datenübertragung mit mehr als 19.2kbit/s zu ermöglichen. Seit Mitte der 1990er Jahre werden UART-Controller in PCs kaum noch als eigenständige integrierte Schaltungen eingesetzt, da die Bereitstellung serieller Schnittstellen im Chipsatz von Multi-I/O Erweiterungskarten und später direkt in die Southbridge des Mainboards integriert wurde.
Varianten
Neben dem eigentlichen UART existieren weitere auf dem UART basierende Schnittstellenbausteine. Übliche Bezeichnungen sind DUART, die Abkürzung steht für Dual Universal Asynchronous Receiver Transmitter, der zwei UARTs in einem einzelnen Mikrochip kombiniert. USART (Aussprache: ʊəˡsat oder 'ju sart) steht für Universal Synchronous/Asynchronous Receiver Transmitter und bietet zusätzlich die Möglichkeit einer synchronen Datenübertragung.
In einfachen Mikrocontroller-Systemen werden Daten häufig über UART-Schnittstellen ausgetauscht, die ohne Handshake, nur über Rx und Tx, und ohne die für RS-232 notwendigen Pegelumsetzer verwirklicht sind. Da mit den Pegelumsetzern auch eine Invertierung wegfällt, findet die Kommunikation über nichtinvertierte TTL-Pegel bzw. CMOS-Pegel statt. Diese für kurze Entfernungen geeignete, auch CMOS-UART bzw. TTL-UART genannte Implementierung wird von praktisch allen Mikrocontrollern unterstützt und kann bei entsprechend geringen Übertragungsraten auch über Software realisiert werden (Bit-Banging).
Auch im kommerziellen Bereich üblich ist die Anbindung von GPS-Empfängern über CMOS-UART.
Literatur
- A. P. Godse, D. A. Godse: Microprocessors and Microcontrollers. Technical Publishing Pune, 2007, ISBN 978-81-8431-297-3.
- Hans-Peter Messmer, Klaus Dembowski: PC-Hardwarebuch. 7. Auflage. Addison-Wesley Verlag, München 2003, ISBN 3-8273-2014-3.
- Jerry D. Gibson (Hrsg.): Mobile Communications Handbook. 3. Auflage. Taylor & Francis Group, Boca Raton 2013, ISBN 978-1-4398-1723-0.
- Hans Liebig, Thomas Flik: Rechnerorganisation. Prinzipien – Strukturen – Algorithmen, 2. Auflage, Springer Verlag, Berlin/ Heidelberg 1993, ISBN 3-540-54632-4.
- Friedrich Wittgruber: Digitale Schnittstellen und Bussysteme. Einführung für das technische Studium. Friedrich Vieweg & Sohn Verlag, 1999, ISBN 3-528-07436-1.
Weblinks
- Die serielle Schnittstelle – Grundlagen
- Datenblatt des 16550D UART (engl.)
- CMOS-UART und RS-232 in modernen Mikrocontrollern
- 16550 UART core – Quelloffene und unter GPL stehende Implementierung eines 16550 in Verilog zur Integration in FPGAs.
Quelle
- Datenblatt PC16450C/NS16450, PC8250A/INS8250A (PDF; 677 kB)