Transduktor (Elektrotechnik)
Ein Transduktor oder Magnetverstärker ist ein elektromagnetisches Bauteil zur Steuerung von Wechselströmen durch Gleichströme mittels Vormagnetisierung des Magnetkernes einer Drossel.
Prinzip und Aufbau
Der meist luftspaltfreie Magnetkern besteht aus einem Werkstoff mit stark nichtlinearer, hysteresearmer Magnetisierungskennlinie. Für niedrige Frequenzen ist das ein Eisenkern, bei hohen Frequenzen werden Ferrite oder nanokristalline Legierungen verwendet.[1] Die Magnetisierung erfolgt durch zwei Spulen, von denen eine den zu steuernden Wechselstrom führt. Diese Spule ist die steuerbare Drossel. Die zweite Wicklung führt den Steuergleichstrom, zumindest jedoch einen Strom mit großem Gleichanteil.
Das Kernvolumen im Wechselstromkreis wird durch den Gleichstrom vormagnetisiert, wodurch seine relative Permeabilität variiert wird. Das kann bis zur Sättigung eines Teiles des Volumens oder des gesamten Volumens gehen. So verliert die Drossel ihren (hochpermeablen) Kern teilweise oder ganz und damit einen Großteil ihrer Induktivität.
Gleich- und Wechselstromwicklung werden oft so angeordnet, dass keine Wechselspannung in die Steuerwicklung transformiert wird. Das kann durch zwei gleichartige, entsprechend verschaltete Transduktoren oder einen dreischenkligen Kern geschehen, dessen Wicklungen entsprechend verschaltet sind (siehe Abschnitt Gegentaktschaltung).
Wird Wechselspannung in die Steuerwicklung induziert, kann diese direkt zur Steuerung verwendet werden, indem man sie so gleichrichtet, dass ein Gleichstrom in der Wicklung entsteht. Solche Transduktorschaltungen können mit lediglich einem veränderlichen Widerstand gesteuert werden – eine Gleichspannungsquelle ist nicht erforderlich.
Betriebsarten
Es sind zwei Betriebsarten möglich. Im Bereich kleiner Wechselströme (kleine Aussteuerung) kann die magnetische Kennlinie im Arbeitspunkt als linear angesehen werden. Der Steuergleichstrom dient in diesem Fall zur Verschiebung des Arbeitspunktes. In dieser Betriebsart stellt der Transduktor wechselstromseitig eine Spule mit elektrisch veränderbarer Induktivität dar und dient z. B. der Amplitudenregelung. Der Wechselstrom ist sinusförmig.
Die zweite Betriebsart (große Aussteuerung) treibt den Kern weit in die Sättigung und dient der Leistungssteuerung. Der Wechselstrom kann in diesem Fall stark von der Sinusform abweichen.
Geringe Aussteuerung (Kleinsignalbetrieb)
Die rechts dargestellte Schaltung ist dafür ein typisches Beispiel. Die auf der Wechselstromseite der Drossel wirksame Induktivität (L= u1/di1) wird durch Verändern der Vormagnetisierung des zugehörigen nichtlinearen magnetischen Kerns verändert. Hierzu wird die zweite Wicklung durch einen in seiner Größe veränderlichen Steuergleichstrom i2 durchflossen. Im Bereich kleiner Steuerströme ergibt sich die größte Induktivität, die abnimmt, je stärker der Steuerstrom den Arbeitspunkt des magnetischen Kreises in Richtung Sättigung verschiebt. Durch die Änderung der Induktivität ändert sich im Wechselstromkreis der Scheinwiderstand der Drossel. Auf diese Weise wird auch die Leistung im Wirkwiderstand R verändert. Ohne Steuerstrom ist die Leistung klein, für maximalen Steuerstrom strebt die Leistung im Widerstand gegen uw/R. Wegen der Voraussetzung der Linearität ist die Leistungsverstärkung eines solchen Transduktors P(gesteuert)/ P(Steuerung) in der Regel unter 1.
.xcf.png.webp)
Hohe Aussteuerung (Großsignalbetrieb)
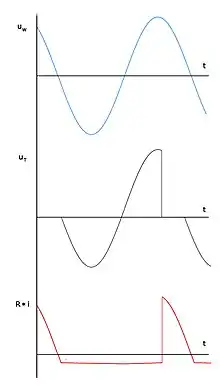
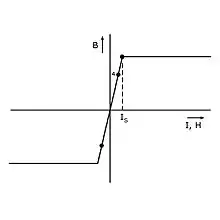
Um größere Spannungen und Leistungen steuern zu können, muss der Großsignalbetrieb vorgesehen werden. Um in diesem Fall die Funktion der Schaltung zu erklären, soll die einfachste Schaltung benutzt und die Randbedingungen stark vereinfacht werden. So sollen die Wechselstromanteile von i2, die auf Grund der transformierten Spannungen auftreten und Verluste erzeugen, durch eine sehr große Induktivität auf vernachlässigbare Werte verringert und damit i2 nahezu ein Gleichstrom werden. Zur Vereinfachung soll weiter die abgebildete abstrakte Magnetisierungskennlinie in Bild 2 gelten. Auch sollen außer dem eingezeichneten Lastwiderstand keine parasitären ohmschen Komponenten vorhanden sein.
Um den periodischen Betrieb sofort zu erreichen, beginnt man die Betrachtung nach der höchsten Sättigung bzw. dem höchsten Strom. Im Kennlinienpunkt 1 ist der Laststrom i1 gleich null. Die Magnetisierung erfolgt nur durch i2. Im Punkt 2 kommt der Kern aus der Sättigung und der Strom i1 ist negativ und fast so groß wie -i2. Wegen der beginnenden Entsättigung tritt Spannung an den Wicklungen auf. Sie ergibt sich zu u1 = uw − R·i1. Wegen der anliegenden Spannung fällt der Strom leicht weiter ins Negative. Er erreicht seinen negativsten Wert bei Punkt 3, an dem wegen des Nulldurchgangs der Spannung u1 sich auch die Richtung der Flussänderung umkehrt. Durch die positive Spannung wird der Kern wieder bis zur Sättigung (Punkt 2) magnetisiert. Wegen der Sättigung wird die volle Generatorspannung an die Last geschaltet. Daraus ergibt sich der fließende Strom i1 = uw/R. Dabei wird Punkt 1 überlaufen und wird im nächsten Stromnulldurchgang wieder erreicht. Der Vorgang wiederholt sich.
Gegentaktschaltung
Schaltet man zwei Anordnungen gemäß Bild 1 wechselstromseitig parallel und lässt den Steuerstrom durch die zwei Sekundärwicklungen in unterschiedlicher Richtung fließen, so wirkt der Steuerstrom in den Teiltransduktoren phasenversetzt. Die in den Gleichstromkreis induzierten Spannungen kompensieren sich. Für kleine Aussteuerung bleiben die Ströme und Spannungen nahezu sinusförmig. Wegen der Parallelschaltung verdoppelt sich der mögliche Laststrom und wegen der Kompensation der induzierten Wechselspannung verringern sich die Verluste im Gleichstromkreis deutlich.
Für den Großsignalbetrieb muss eine erneute Betrachtung der Vorgänge angestellt werden, da der Überlagerungssatz wegen der ausgenutzten (magnetischen) Nichtlinearitäten nicht gilt. Dazu wird von der in Bild 4 dargestellten Schaltung und der zugehörigen Bepfeilung ausgegangen. Für die Bilder wurde der Punkt 4 der Magnetisierungskennlinie in Bild 5 als Wirkung des Steuerstromes i2 = ⅔IS und das Windungszahlverhältnis gleich 1 gewählt.
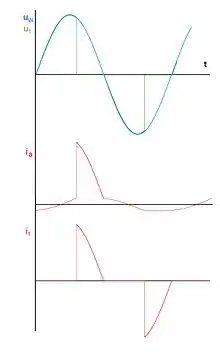
Im Ursprung der Magnetisierungkennlinie ist der Laststrom gleich null und die Ströme ia und ib müssen gerade so groß wie die Steuergleichströme sein, aber diesen entgegenwirken. Bei gleichem Wickelsinn und der Bepfeilung nach Bild 4 ist also ia = −i2 und ib = i2. Für den Gesamtstrom gilt i1 = ia + ib = 0. Im Punkt 4 ist ia = 0 und ib = 2·i2 = i1. Mit dem Einsetzen der Sättigung für die Wicklung a wird an beiden Wicklungen die Wechselspannung null und der Strom i1 wird von der Last, an der die Netzspannung anliegt, begrenzt. Die Wicklungsströme sind ia = i1 + IS − i2 und ib = −IS + i2. Wird der Lastrom (rein ohmsch) im Nulldurchgang der Spannung zu null, kommt der betreffende Kern aus der Sättigung. Während der negativen Spannungshalbschwingung werden die Kerne rückmagnetisiert. In dieser Zeit ist der Laststrom null und die Ströme ia und ib gehen auf die Werte im Ursprung der Magnetisierungskennlinie zurück. Anschließend wird in der gleichen Weise ihr negative Ast durchlaufen. Die wesentlichen zeitlichen Verläufe sind in Bild 6 dargestellt.
Bezüglich der Verluste ist die Gegentaktschaltung deutlich günstiger als Schaltung nach Bild 1, weil sich die in den Gleichstromkreis induzierten Wechselspannungen kompensieren und weil, wie aus den Bildern 2 und 5 hervorgeht, ein relativ kleinerer Steuerstrom benötigt wird.
Man kann auch noch einen weiteren Vorteil nutzen, wenn man die Leistungswicklungen antiparallel schaltet und den Steuerstrom im gleichen Sinn durch die Wicklungen fließen lässt. In diesem Fall lassen sich die Steuerwicklungen zu einer zusammenfassen. Der Aufbau einer solchen Anordnung ist in Bild 7 schematisch dargestellt. Der Eisenkörper hat in diesem Fall drei Schenkel. Es ergibt sich in der vereinfachten Theorie keine nennenswerte Materialersparnis, da die Steuerwicklung in diesem Fall den doppelten Eisenquerschnitt umschließen muss. Bei Berücksichtigung der in der Praxis auftretenden Eisen- und Kupferverluste wird die Materialersparnis größer.
Die Strom- und Spannungsverläufe und die Steuerfunktion der Gegentaktschaltung entsprechen denen eines Wechselstromstellers (Leistungselektronik) mit Phasenanschnittsteuerung. Da dieser billiger, im Wirkungsgrad besser und auch leichter und kleiner ist, hat er den Transduktor als Steuergerät für Wechselströme abgelöst.
Anwendung
Transduktoren sind fast vollständig durch die Halbleitertechnik verdrängt worden, es gibt jedoch noch einzelne Anwendungen, wo es auf hohe Robustheit und Zuverlässigkeit ankommt. Transduktoren sind langlebig und bei Überspannungen und Kurzschluss im Gegensatz zu Halbleiterschaltungen kaum gefährdet. In der Vergangenheit (1930er bis 1960er Jahre) war der netzfrequente Transduktor eine gebräuchliche Lösung zur Steuerung, beispielsweise von Kinobeleuchtungen. Er benötigte keine bewegten Teile wie ein Stelltransformator und ist verschleißfrei. Röhrenmonitore und -fernseher besaßen zur Kissenentzerrung teilweise Transduktoren, die die Zeilenamplitude regelten.[2] Schaltnetzteile enthielten besonders in den 1990er Jahren teilweise Transduktorregelungen auf der Sekundärseite.[3] Auch Audioverstärker wurden mit Transduktoren ausgeführt, Messwandler für Gleichstrom können ebenfalls mit Transduktoren gebaut werden.[4]
Eine weitere Anwendung findet sich im Bereich von Elektrolysen. Hier kommen Gleichrichtertransformatoren mit Transduktoren in der unterspannungsseitigen Ableitung zum Einsatz, die Diodengleichrichter speisen. Die Transduktoren werden für die Feinregelung des Ausgangsstroms verwendet. Die Grobregelung erfolgt mittels Stufenschalter der Transformatoren.
Eine Besonderheit ist die Pungs-Drossel (nach Leo Pungs benannt), die zur Amplitudenmodulation diente. Sie war entsprechend Bild 7 aufgebaut und arbeitet bei der Sendefrequenz.[5] Sie arbeitete direkt am Senderausgang auf den abgestimmten Antennen-Schwingkreis. Die oben dargestellten zeitlichen Verläufe der Ausgangsspannung können daher nicht auf diese Anwendung übertragen werden.
Literatur
- Walter Schilling: Transduktortechnik. Theorie und Anwendung steuerbarer Drosseln. Verlag R. Oldenbourg, München 1960
- Fritz Kümmel: Regel-Transduktoren: Theorie und Anwendungen in der Regelungstechnik. Springer-Verlag; 456 Seiten; Berlin/Göttingen/Heidelberg 1961 - eingeschränkte Vorschau in der Google-Buchsuche
Einzelnachweise
- Patentanmeldung DE10045705A1: Magnetkern für einen Transduktorregler und Verwendung von Transduktorreglern sowie Verfahren zur Herstellung von Magnetkernen für Transduktorregler. Angemeldet am 15. September 2000, veröffentlicht am 4. April 2002, Anmelder: Vacuumschmelze GmbH & Co KG, Erfinder: Günter Wulf.
- Patent DE3005901C2: Transduktor. Angemeldet am 16. Februar 1980, veröffentlicht am 1. März 1990, Anmelder: Telefunken Fernseh- und Rundfunk GmbH, Erfinder: Alfred Pollak.
- http://focus.ti.com/lit/ml/slup129/slup129.pdf Applikationsschrift der Fa. Unitrode (heute Texas Instruments)
- http://www.auditorium23.de/MagAmp/MagAmp.pdf
- http://www.seefunknetz.de/libo.htm Pungs-Drossel