Servo
Ein Servo (lateinisch servus, „Diener, Sklave“) bezeichnet in der Elektrotechnik einen Verbund aus Ansteuerungs- und Antriebseinheit. Dies ist üblicherweise ein Elektromotor samt seiner Steuerelektronik. Im allgemeinen Sprachgebrauch werden Servos häufig mit Servomotoren gleichgesetzt.
.jpg.webp)

Modellbauservos
Im Modellbau werden spezielle Modellbauservos eingesetzt. Ihre kompakte und leichte Bauweise ist vor allem für Flugzeugmodelle von Vorteil.
Montage und Anschlüsse
Zur Montage haben klassische Modellbauservos auf zwei Seiten Befestigungsvorrichtungen, mit denen sie auf einer Unterlage festgeschraubt werden können. Modellbauservos werden direkt am Empfänger oder Controller angeschlossen. Das Kabel besteht aus drei Leitungen: Die Versorgung (VCC), Masse (GND) und eine Signalleitung (PWM). Der Empfänger liefert dem Servo Versorgungsspannung und ein Steuersignal. Steckerformen, Steckerbelegungen und Drahtfarben sind unter den verschiedenen Herstellern nicht einheitlich, was zu Kompatibilitätsproblemen führen kann.
Ansteuerung
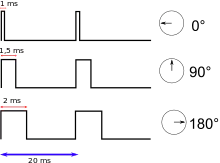
Modellbauservos werden über eine Pulsweitenmodulation (PWM) angesteuert. Über die Breite der Pulse wird der Winkel, auf den der Servoarm gestellt werden soll, gesteuert. Gängig ist ein 50-Hz-Signal (20 ms Periodenlänge), welches zwischen 500 Mikrosekunden (linker Anschlag, 0 Grad) und 2500 Mikrosekunden (rechter Anschlag, 180 Grad) auf High-Pegel und den Rest der Periodenlänge auf Low-Pegel ist. Viele Servos haben in diesem Wertebereich jedoch nicht ihre volle Bewegungsfreiheit ausgenutzt und/oder können sich zwischen anderen Winkeln bewegen. Beispiel: 0 Grad bei 1 Millisekunde und 180 Grad bei 2 Millisekunden. Die Werte, bei denen der Servo ganz links bzw. rechts ist, können auch unterhalb 1 Millisekunde bzw. oberhalb 2 Millisekunden liegen. Die Periodendauer von 20 ms ist kein kritischer Wert und muss bei der Ansteuerung nicht eingehalten werden.
Positionsregelung
Bei Modellbauservos wird der Winkel der Ausgangswelle geregelt. Zur Ermittlung des Winkels befindet sich im Servoinnern ein Potentiometer, das mit der Ausgangswelle verbunden ist. Über dieses Potentiometer ermittelt die Servoelektronik den Ist-Winkel der Ausgangswelle. Dieser wird mit dem Soll-Winkel verglichen, der aus dem PWM-Signal ermittelt wird. Bei einer Abweichung zwischen Ist- und Soll-Winkel regelt die Elektronik über den Motor und das Getriebe den Winkel der Ausgangswelle nach. Ein Nachteil von Modellbauservos ist, dass sich nicht abfragen lässt, ob der Servo überlastet ist. Das führt dazu, dass sich nicht feststellen lässt, ob der Servo überhaupt in der Lage ist, die gewünschte Position anzufahren.
Analog- und Digitalservos
Die Elektronik von Modellbauservos kann digital oder analog aufgebaut sein. Demnach werden Servos als Digital- oder Analogservos klassifiziert. Digitalservos haben eine höhere Winkelauflösung und die Servoposition wird schneller und präziser geregelt. Digitalservos lassen sich häufig auch umprogrammieren, wodurch sich (je nach Servomodell) die Geschwindigkeit, der Überlastschutz und ähnliches an die Anwendung anpassen lassen.[1] Allerdings ist der Bedarf an Hilfsenergie und auch der Preis von Digitalservos höher als der von Analogservos.
Servomodifikation
Eine häufige Modifikation an Modellbauservos ist der Umbau in einen Getriebemotor ohne Positionsregelung und endlosem Drehwinkel. Dazu muss im Servogehäuse ein mechanischer Anschlag am Endachsenzahnrad entfernt werden und das Potentiometer wird durch zwei Festwiderstände ersetzt. In der Hobbyelektronik werden derart modifizierte (auch: gehackte, von engl. Hack bzw. Hacker) Servos oft als Radantrieb für mobile Roboter verwendet. Vorteile gegenüber käuflichen Getriebemotoren sind: geringerer Kaufpreis, einfache Montage am Chassis, einfache Montage der Räder auf der Servoachse, der Motortreiber ist im Servo integriert. Nachteile sind das schwache Plastikgetriebe bei Billigservos und die oft nicht ganz gleichmäßige Drehbewegung, die bei unsachgemäßer Modifikation der Servomechanik entstehen kann.
Automobilbau
In der Automobiltechnik werden immer mehr Einsatzvarianten von Servos erschlossen. Betätigungen der versenkbaren Radioantenne, der Fensterheber, von Sitzverstellungen usw. erfolgen mit Servos. Zur Steuerung und Überwachung dieser Servos sind sie meistens an Steuergeräte angeschlossen. Für einfache Fälle wie die Fensterheber wird kein Potentiometer für die Lagerückmeldung verwendet, sondern lediglich Endpositionskontakte.
Festplatten
Im englischen Sprachraum wird der Regelkreis aus mechanischem Antrieb und magnetischer Positionskontrolle zur Positionierung der Schreib-/Leseköpfe von Festplatten ebenfalls als Servo bezeichnet. Zunächst kamen vor allem Schrittmotoren mit einer Gewindespindel zum Einsatz, heutzutage praktisch ausschließlich Tauchspulsysteme („Voicecoil“) mit Lageregelung.
Weblinks
- Beschreibung des Servosteuersignals und der Positionsregelung
- Tutorial Servo Hacking